张云锦
(中国直升机设计研究所,江西 景德镇 333000)
0 引 言纹理是对物体表面特有属性的描述。不同纹理之间属性上存在较大差异,因此可根据纹理之间的差异对不同类别的纹理进行区分,即纹理分类。纹理分类是图像处理、模式识别等领域中重要的研究课题,在近几十年吸引了大量科研人员的关注。
随着纹理分类研究的不断深入,国内外研究人员提出了多种纹理特征描述方法,如灰度差分统计、灰度共生矩阵(Gray Level Cooccurrence Matrix, GLCM)等。虽然上述方法的计算复杂程度较低,但对纹理细节的描述不够准确,忽略信息较多,从而导致无法提取多尺度图像特征。随后,小波变换理论、马尔可夫随机场等方法相继被提出。小波变换理论可以处理得到不同分辨率下的纹理特征,该方法虽然能较好地避免噪声对于纹理特征提取的影响,但对边缘模糊及受光照干扰图像的处理效果较差。
针对以上纹理特征提取方法中存在的问题,2002年,Ojala 等人首次提出了用于描述图像局部空间结构的局部二值模式(Local Binary Pattern, LBP)纹理描述算子。通过邻域像素与中心像素之间的差异信息提取纹理特征,该算法计算简单,抗干扰性较好,因此在医学图像处理、运动跟踪、人脸识别等领域取得了广泛应用。
然而,传统的LBP 算子仍存在设计上的缺陷。该算子仅考虑邻域像素与中心像素之间的差异,忽略了局部邻域像素强度信息,因此鲁棒性较差。为此,众多学者对其进行了改进研究。Jin 等人提出一种改进LBP(Improved Local Binary Pattern, ILBP)纹理特征描述算法,该算法对传统LBP 算子的中心像素的取值方式进行改进,利用邻域像素与该区域内所有像素值的均值的差异进行二进制编码,增强了算法对于噪声的鲁棒性。Tan 等人提出了一种局部三值(Local Ternary Pattern, LTP)纹理特征描述算法,该算法引入阈值,将邻域像素与中心像素灰度值之间的差值分别与所设阈值进行比较,最终得到-1,0,1 三种状态,在一定程度上降低了算法对噪声的敏感性。Hafiane 等人提出了一种中值(Median Binary Pattern, MBP)纹理特征描述算法,该算法将首先将邻域像素点按照灰度值的大小进行排列,并将该序列的中值作为阈值,然后将邻域像素分别与阈值进行二值量化,同时中心像素也参与二值量化,最终得到九位二进制串,提高了算法对纹理特征的提取性能。但是,以上改进纹理特征算法普遍存在对噪声敏感且鲁棒性较差的问题。
为提高纹理特征算子的抗噪稳健性,本文在原始LBP 算子基础上提出将纹理方向信息融合到纹理特征中的方法,利用纹理的方向特性来提高特征提取算法的鲁棒性。
1 局部二值模式纹理特征描述算子1.1 传统LBP 纹理描述算子原始LBP 算子提取特征时,首先将邻域像素值与中心像素的像素值进行比较,如果其大于或等于中心像素值,则该位编码为1,否则编码为0。然后根据不同位置对应的权重将此二进制编码加权累加,从而得到该中心像素的局部二进制模式,如图1所示。
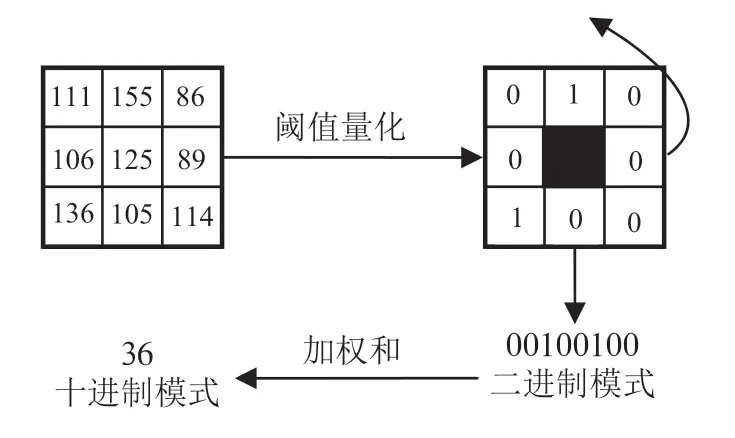
图1 原始LBP 算子计算纹理特征示例
为了提高算子的表征性能以及便于获取较大半径下的纹理特征信息,Ojala 等人提出采用圆形邻域系统代替最初的矩形邻域系统来作为LBP 提取纹理特征的算子,从而计算出该像素点的LBP 计算值,并以该值反映此区域的纹理信息。圆形邻域算子如图2所示。
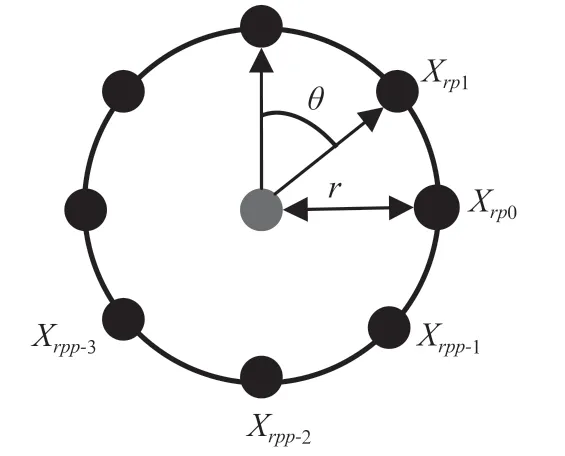
图2 改进LBP 纹理特征描述算子结构图示
将中心像素与邻域像素进行比较最终得到该中心点相对应的二进制编码,然后根据不同位置对应的权重将此二进制编码加权累加,所得即为该点的LBP 纹理特征值。设(,)为图像中的某一中心像素点,则该点的LBP 纹理特征值表达式如下:

式中:

式中X表示中心点,表示圆形邻域的半径,表示该邻域上采样点的数目,X表示以为半径的圆周上等角间隔且均匀分布的个像素点,X的下标第三个值用来表示某个邻域像素的位置。
对于一副图像而言,对每个像素点的LBP 纹理特征值进行计算并通过不同描述算子进一步降低纹理特征值的维数后,统计每个特征值出现的次数,进而得出图像的特征直方图,即为所提取的图像特征。
为便于利用特征直方图进行分类计算,需对LBP 纹理特征进行降维并重新编码。Ojala 在圆形LBP 算子的基础上提出旋转不变模式以及旋转不变均匀模式2 描述算子,描述算子表示将传统的LBP 算子提取得到的二进制串不断旋转,之后将所得到个不同的二进制串所表示十进制中值最小的作为该中心像素最终的LBP 纹理特征二进制串。描述算子2 在模式基础上,将二进制相邻序列中0 和1 之间的跳变次数小于或等于2 定义为均匀模式,变换次数大于2 则定义为非均匀模式,进一步降低了纹理特征的维数。
传统LBP 纹理特征描述算法虽然实现起来相对容易,但其抗干扰性差,限制了其在纹理分类、人脸识别等领域中的应用。
1.2 改进的局部二值模式(ILNRBP)纹理特征描述算子由于大部分图像受到不确定的噪点干扰,而传统LBP纹理特征算子对于噪点干扰的鲁棒性较低,因此,本文提出一种改进的局部抗噪二值模式(Improved Local Noise Robustness Binary Pattern, ILNRBP)纹理描述算子。与传统LBP 纹理描述算子的不同,ILNRBP 纹理描述算子将各邻域像素点的灰度值由该邻域像素点周围四个邻域像素点的均值替换,然后以T 为阈值,将邻域像素灰度替换值与中心像素灰度值的差值二值量化得到图像某一像素点的纹理特征二进制串,最后根据不同位置对应的权重将此二进制编码加权累加,得到该点的ILNRBP 纹理特征值。如式(3):

式中:

式中X表示中心点。表示半径,表示该邻域上采样点的数目,表示某个邻域像素的位置,为阈值。(X,)表示以邻域像素X为中心,以为半径的圆形邻域上等角间隔的四个邻域像素值的均值,如式(5):


本算法将邻域像素与中心像素灰度值的比较结果分别与阈值T 进行比较,防止因噪点等微小波动对有效纹理特征的提取造成干扰,极大地提高了对噪声的稳健性,ILNRBP 算子提取图像纹理特征值如图3所示。
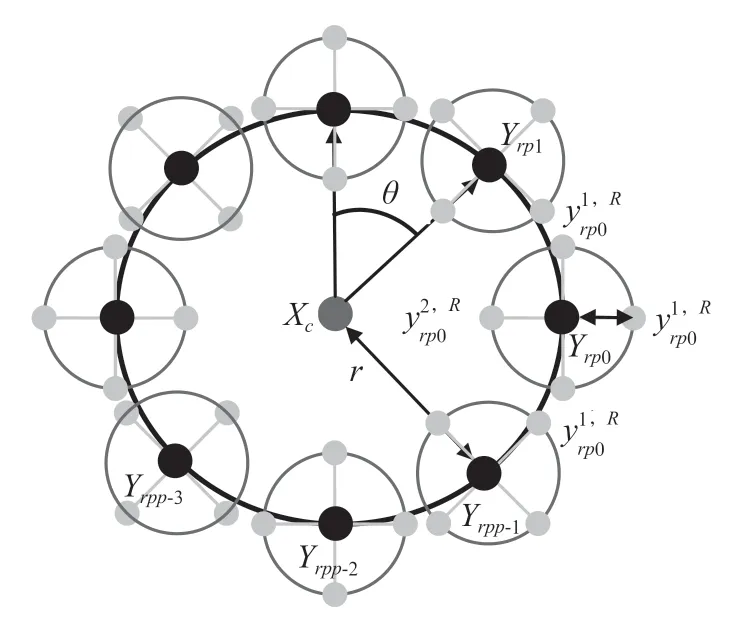
图3 ILNRBP 纹理特征描述算子结构图示
利用ILNRBP 算子对图像所有像素点进行二进制编码,然后根据不同位置对应的权重对所有二进制编码进行加权累加,进而得到所有像素点的特征值,之后得出该幅图像的纹理特征直方图H。
2 实验2.1 数据集说明为验证ILNRBP 算子的有效性,在经典数据集Outex(TC10,TC12_000,TC12_001)上进行LBP、ILNRBP算子纹理分类准确率对比实验,表1是对各数据集的说明。
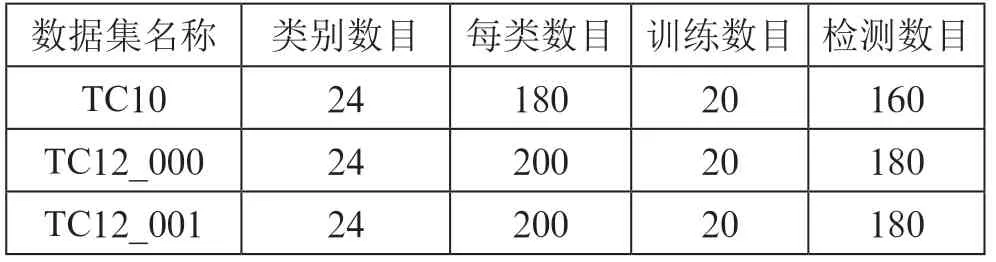
表1 各数据集说明
2.2 实验分类方法说明本文首先利用纹理描述算子提取图像纹理统计直方图,并将其作为图像特征。然后采用卡方距离(chi-square,²)来计算特征直方图之间的距离,并计算其预测类别,如式(6):

式中,分别表示两个特征直方图,表示特征直方图维数大小,q,l分别表示特征直方图,的第个值。
然后分别将每幅图像的预测类别与数据集提供的准确类别标签进行对比。最后通过统计得到对应数据集的纹理分类准确率程度。
2.3 实验结果及分析实验中式(1)和(3)中、取值分别为1、8,式(3)中取值为3。在Outex(TC10,TC12_000,TC12_001)三种数据集中图像作为本次检测准确率实验的训练、测试样本。实验结果如表2所示。
从表2中可以看出,本文提出的ILNRBP 算子在Outex(TC10,TC12_000,TC12_001)纹理库上识别的准确率显著优于LBP 算子,说明本算法提取图像纹理并进行分类时,具有较强的特征鉴别能力。
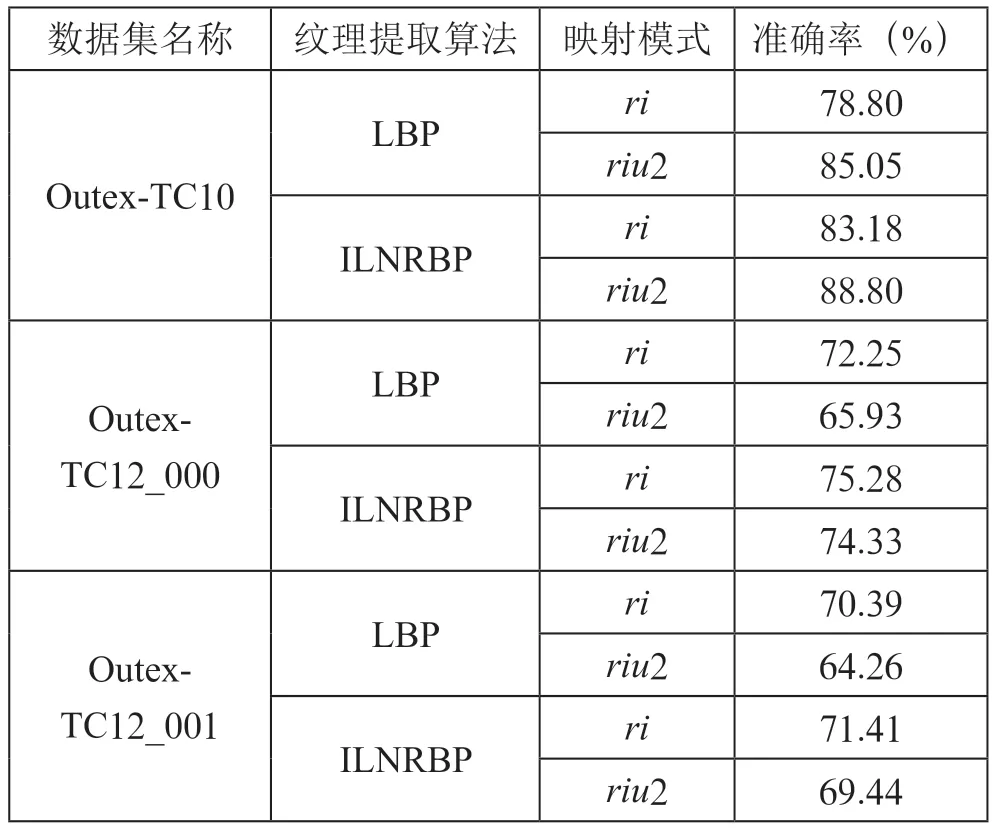
表2 LBP、ILNRBP 算子纹理分类准确率比较
在数据集Outex_TC10、OutexTC12_000、OutexTC12_001上进行纹理分类实验时,LBP 算子与本文提出ILNRBP 算子在半径与中心像素点邻域比较点数目相同时,在模式下,ILNRBP 算子对其分类的准确率比LBP 算子分别高4.38%、3.03%、1.02%;在2 模式下,ILNRBP 算子对其分类的准确率比LBP 算子分别高3.75%、8.40%、5.18%。实验说明,本文提出的ILNRBP 算子在纹理分类实验中表现出更优的准确率,具有较强的区分能力,且在一定程度上提高了算法对于纹理特征提取的稳健性,使得纹理分类的准确率能够得到较大程度上的提高。
3 结 论本文针对原始局部二进制特征算子在提取纹理特征时对噪声敏感度低的问题,提出ILNRBP 算子。本算法与传统纹理特征提取算法相结合,降低了在邻域像素点受到干扰时对图像纹理提取所带来的影响,使其在处理带有干扰的纹理图像处理时具有更优的能力。本文在Outex(TC10,TC12_000,TC12_001)数据集上进行ILNRBP 与传统局部二进制算子提取纹理特征后分类准确率的对比实验。实验结果表明,本文所提出的ILNRBP 算子在进行纹理图像特征提取时,其分类的准确率要高于传统纹理描述算子,增强了图像纹理特征提取的鲁棒性。