
摘 要:以Arduino作为主控制板,设计制作了一种面向聋盲症人群的震动触觉感应手杖。该手杖配备震动传感器,可通过一系列检测模块检测手杖周围的环境,并通过不同频率的震动反馈将四周环境信息传达给使用者,帮助聋盲症患者了解周围路况。为减少意外的发生,手杖还设有防摔倒模块与自动照明模块等,为聋盲症的患者出行提供保障,具有检测精度高、使用简便、安全性高等特点,对帮助聋盲症患者增强独立性、更好地融入社会具有重大意义。
关键词:Arduino;震动触觉感应;防摔倒模块;检测反馈
中图分类号:TB472 文献标识码:A 文章编号:2096-4706(2024)14-0157-05
Research on Design of Vibrotactile Induction Walking Stick for Deaf-blind People
XIN Yu, HAO Chuanzhu
(Shandong Huayu University of Technology, Dezhou 253034, China)
Abstract: This paper uses Arduino as the main control board, designs and makes a vibrotactile induction walking stick for deaf-blind people. The walking stick is equipped with a vibration sensor, which can detect the environment around the walking stick through a series of detection modules, and communicate the surrounding environment information to the users through vibration feedback of different frequencies, helping deaf-blind people understand the surrounding road conditions. In order to reduce the occurrence of accidents, the walking stick is also equipped with an anti-fall module and an automatic lighting module and so on, so as to provide protection for the travel of deaf-blind patients, with high detection accuracy, easy to use, high safety and other characteristics. It helps them enhance their independence, and it is of great significance for them to better integrate into the society.
Keywords: Arduino; vibrotactile induction; anti-fall module; detection feedback
DOI:10.19850/j.cnki.2096-4706.2024.14.032
收稿日期:2024-01-13
基金项目:2023年省级大学生创新创业训练计划项目(S202313857042)
0 引 言
随着各界人士对残障人士的关注日益增多,人们也注意到了盲人群体中一个更为特殊的群体——被视觉听觉双重障碍困扰的聋盲症患者。因特殊的缺陷,聋盲症患者的出行比单纯的盲人更加困难[1]。
据统计,中国每8万名盲人才拥有一只导盲犬。且现实中领养导盲犬流程烦琐冗长,花费较高。从基础建设来说,我国盲人需要的设施并不完善,与发达国家相比仍有差距,且现有的基础设施得不到保护,损坏也得不到立即修复[2],这些情况加剧了盲人出行的难度。而聋盲症患者由于同时失去了视觉与听觉,与外界的交流则更倾向于凭借触觉感知,他们的生活比单纯的盲人更加困难,出行也越发不能得到保障。他们需要依靠其他方式来获取环境信息并保证自身的安全,需要更为简单易懂的操作来帮助自己出行。
为了解决这一问题,该文设计了一款震动感应手杖,可通过不同频率的震动反馈将路况信息传达给使用者。有相关研究表明,视障人群的触觉感知比明眼人更加敏锐[3]。为保证使用者的安全性,另外设置防摔倒模块与照明模块等,旨在为聋盲症患者提供更便捷、更安全的出行方式。
1 国内外的研究和发展动态
目前在国内外都有很多关于智能盲杖手杖的研究,主要集中在感知技术的研究,包括激光雷达、超声波、红外线、摄像头等传感器技术的应用。从20世纪开始,国外就一直在尝试对白手杖进行重新设计,且已有超过100项可以检测障碍物并具有相关电子功能的智能拐杖被发明出来。因此,国外在智能拐杖领域已经有了初步的进展,在盲用智能拐杖的产品研发方面也屡有突破。目前,国外的部分国家已推出很多具有创新性和新功能的产品。
一方面,设计这些智能手杖的工程师难以完全掌握盲人的行为特征和具体需求,因此,他们最终制造出的智能拐杖往往使用起来较为复杂,会干扰智能拐杖最重要的核心功能;另一方面,这些新兴的盲人智能拐杖产品还有很多局限,比如感应范围较小、精准度不够、把手处体积较大重量较重、耗电量快,等等。同时,一些智能拐杖的价格也超出了盲人群体可以接受的范围,对许多盲人来说无法承受[4]。
目前国内外盲用产品种类繁多,涉及盲人生活的方方面面,产品大都为通用性设计,但并没有考虑到特殊群体的需求[4]。虽然国外在智能拐杖领域已经获得了不少的成果,但针对聋盲症患者听不见也看不见的这一问题,很少有人在这一方面进行研究并制造出相应产品,给予他们相对便利安全的出行保障。
2 主要研究内容
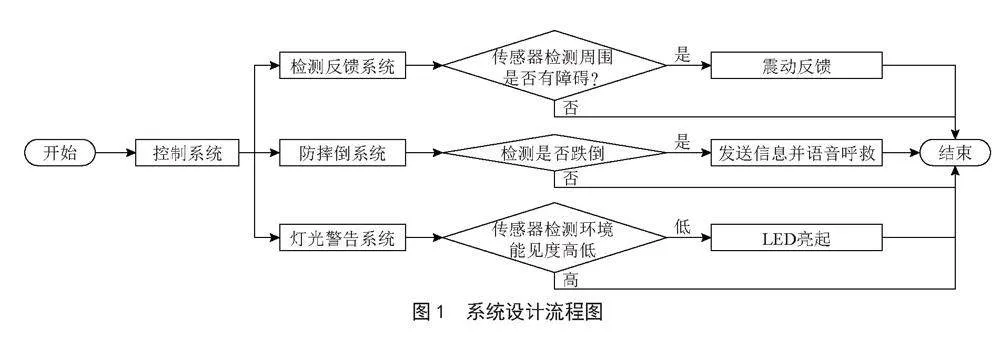
Arduino板是一种基于微控制器的开发板,用于构建电子设备。它通常包含微控制器、输入输出端口、电源、编程接口等组件,并通过USB或其他接口与计算机连接。Arduino板支持多种硬件模块,包括传感器、执行器、显示器等,简单易用,成本低,且极具灵活性[5]。系统设计流程图如图1所示,通过控制系统实现以下功能:
1)手杖中安装有震动马达模块,当超声波测距模块和积水探测模块检测到障碍物时,根据检测到的不同方位传导不同的信号至震动马达模块,生成不同频率的震动,以便视听障碍人士辨别障碍物的方向,并及时避开。
2)手杖设置了光照度传感器,利用光照度传感器测量环境光照强度。光线不足时光照度传感器模块通过检测光照强度来使LED灯自动亮起以提醒行人和车辆避让。
3)手杖中设有防摔倒模块,通过震动传感器来检测使用者的情况。一旦遇到摔倒之类的突发状况,将会通过语音模块发出警报,向周围路人寻求帮助,并向紧急联系人发送短信。
4)手杖设有防误报模块,当检测失误或使用者无大碍的情况下,可按下防误报按键,停止呼救信息的传递。
3 系统设计
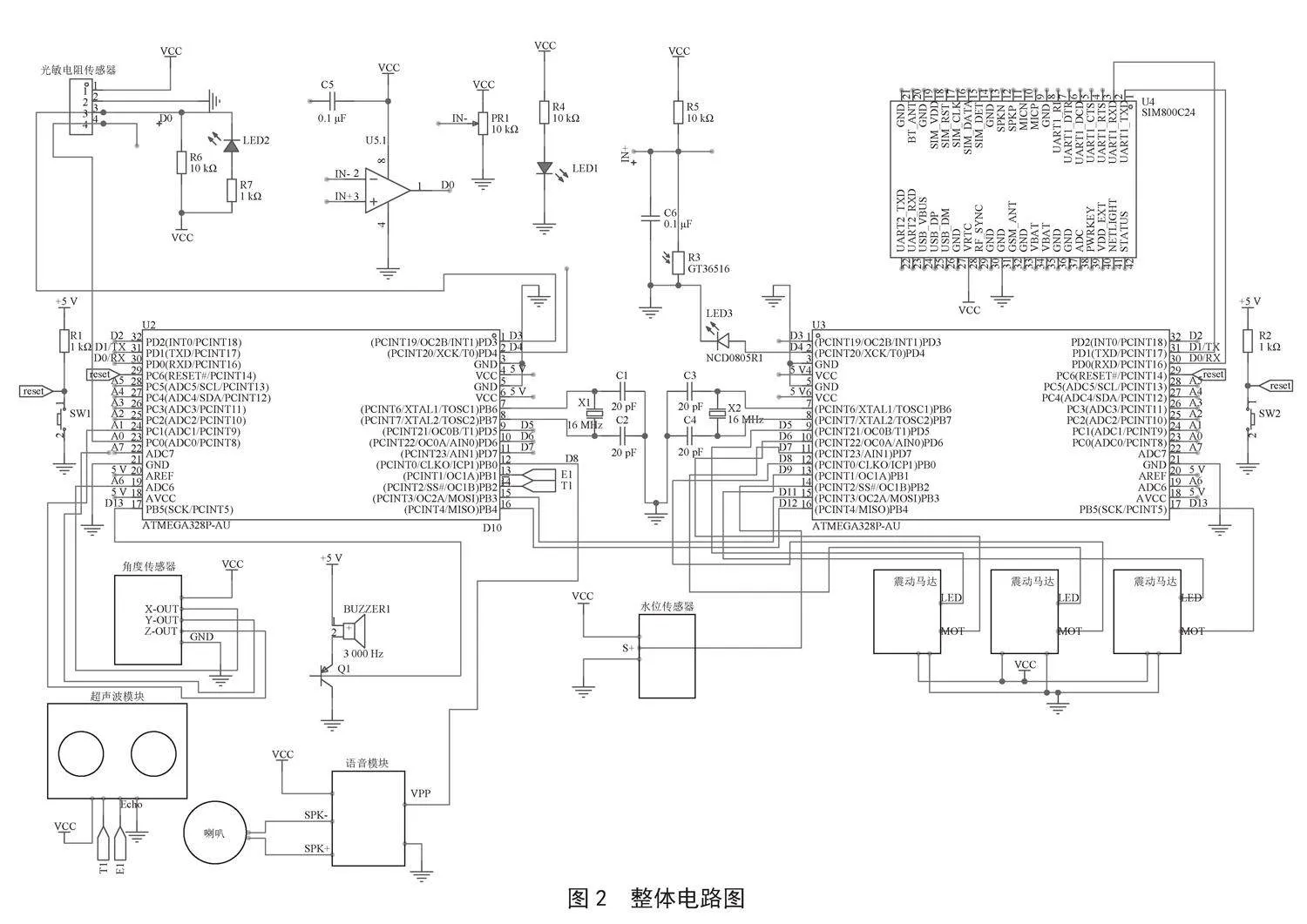
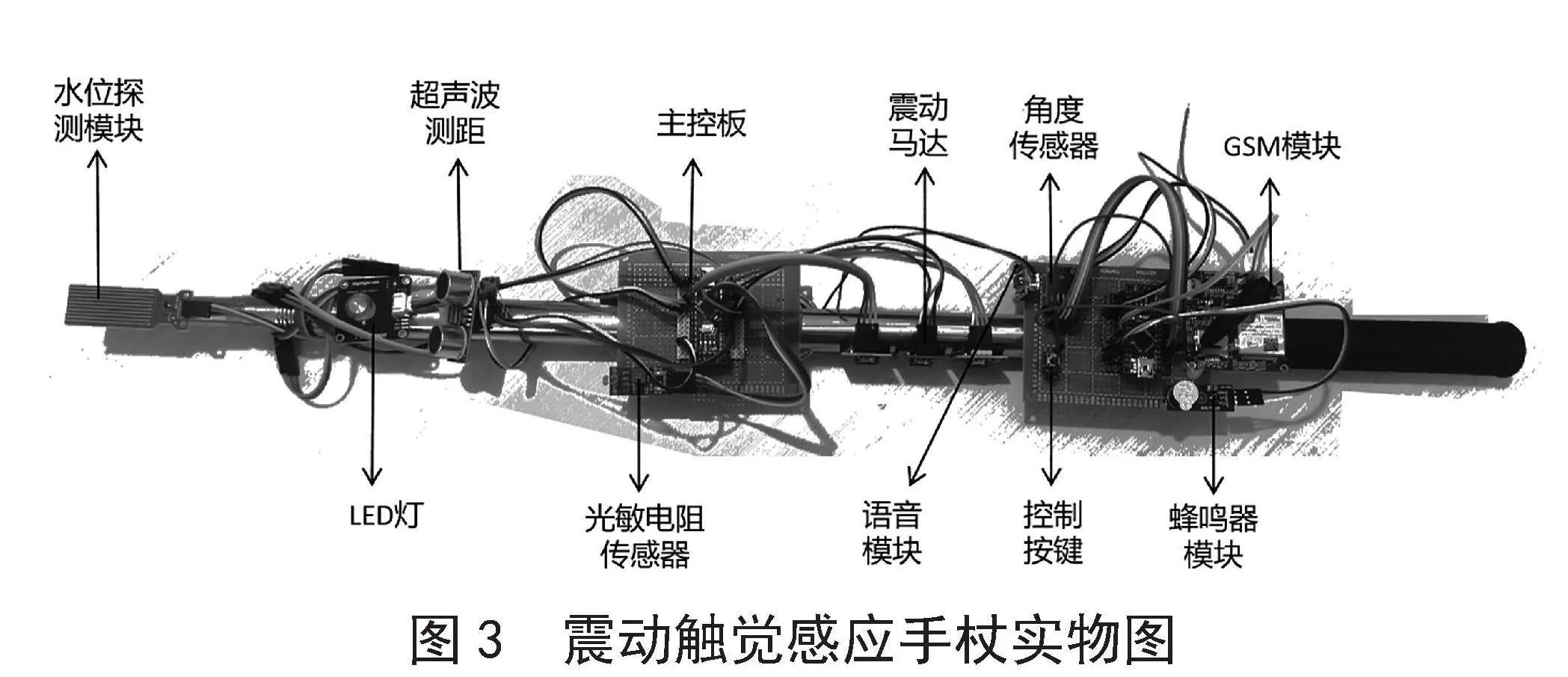
手杖上下部分均采用可伸缩式设计,完全展开时高度可达1.8 m,可适宜大部分人群身高。手杖中部为手柄部分,与上下部分相接的边缘处镶嵌有LED灯,光线不足时自动亮起,提醒行人和车辆避让。杖体中空,内含震动感应模块、语音模块、光照度传感器模块、超声波模块和积水探测模块等各种模块。手杖最下部装有滑轮,使用更加省力[6],整体电路图如图2所示,实物图如图3所示。
3.1 超声波测距
手杖上下部分都装有超声波测距模块,采用的是HC-SR04。该传感器体积小,易于在任何机器人项目中使用,并提供2~400 cm之间出色的非接触范围检测,精度为3 mm。它能够实现对上下一定范围内的障碍物进行检测,并且通过震动进行提示。目前探测的距离设定为1.2 m,采用的传感器波束角约为45°。
超声波测距的方法主要有三种:幅值检测法、相位检测法与渡越时间检测法。第三种方法利用了常用的距离计算公式,计算出超声波发射与接收到回波的时间差,转化成距离,这种方法比较常用,本文的测距过程就是采用这种方法[7]。
3.2 积水探测模块
在手杖的底部安装积水探测传感器来检测路面是否有积水,若附近地面有积水,则通过震动提醒使用者躲避积水。我们选择性价比较高的积水探测传感器[8],它用探头探测是否有水存在。由于液体导电原理,当有水时,探头之间形成通路,控制器转换成开关量输出信号启动震动马达模块。水浸探测器根据探测电极浸水后阻抗发生变化,通过信号处理电路对水浸输入信号进行信号放大、整形、比较,输出干接点或高低电平变化信号,指示探测器所在位置是否有水[9]。
3.3 震动马达模块
震动马达模块是高低电平震动小电机,主要装有一个微型震动马达,通过TIM16_CH1电平改变控制电路的通断从而驱动震动马达进行工作。马达轴上有一个偏心轮,当马达转动的时候,偏心轮的圆心质点不在电机的转心上,使得马达处于不断失去平衡状态,由于惯性引起震动。
当超声波测距模块和积水探测模块检测到障碍物时,会根据检测到的不同方位传导不同的信号至震动马达模块,生成不同频率的震动,以便视听障碍人士辨别障碍物的方向,并及时避开。
3.4 光照度传感器
光照度传感器利用光敏传感器测量周围环境的光照强度。光线不足时,光照度传感器模块检测到光照强度较低,使LED灯自动亮起以提醒行人和车辆避让。光敏电阻工作原理是基于内光电效应,内光电效应是指在光线作用下使材料内部电阻率改变的现象。当光线照射在半导体材料上时,其导电性能增强,电阻值降低,各种环境下照度值如表1所示。
根据上表及日常生活常识,阴天时能见度变低,光敏电阻模块对环境光线敏感,故当光敏传感器检测到照度值下降到50勒克斯以下时,开启LED灯,提醒行人避让。
3.5 防摔倒模块
3.5.1 传感器的选择
为能够准确灵敏地检测使用者的情况,我们主要对常用的两种传感器进行了调研测试:
1)倾斜角传感器。倾斜角传感器通常具有特定的测量范围,超出该范围可能导致精度下降或无法测量。对于需要测量大角度范围的应用,可能需要多个传感器或使用其他测量方法。若须对摔倒进行精确的检测,可能会因算法过于复杂导致主控板内存不足。且此传感器通常对于放置方向有限制,不符合我们的需求。
2)震动传感器。震动传感器是一种能够检测并测量物体振动的设备或装置。它可以感知物体在垂直、水平或其他方向上的运动,并将这些振动转换为电信号或其他形式的可读输出。相较倾斜角模块,它的优势在于可任意角度触发,检测灵敏且能够快速地响应并输出电信号。震动传感器的设计和制造经过严格的测试和验证,因此具有较高的可靠性和稳定性,所以我们最终选用震动传感器。
3.5.2 语音播报
语音模块采用插卡方式存储语音,操作简单,可直接连接扬声器来进行语音播放。
有很多聋盲症患者是不会说话或说话不清晰的,当聋盲症患者摔倒时,不能及时呼救也成了一大问题。在聋盲症患者摔倒时,防摔倒模块可以及时通过传感器检测到这一情况,并通过语音模块及时向周围人群自动呼救,寻求帮助。
3.6 GSM短信传输模块
GSM通信模块是数据传输的通信核心。检测到聋盲症患者摔倒后,系统便会向设置的紧急联系人发送信息,使家属及时获知使用者现在的情况。SIM900A可以安全、快速、可靠地实现系统方案中的数据、语音传输以及短消息服务和传真[10]。此模块的优点在于串口电路采用TVS和磁珠保护器件来保护板子,使板子不会受到浪涌、高电压的伤害;SIM卡电路增加SMF05C静电释放芯片;天线电路保证短且直,保证信号强度。
3.7 防误报模块
摔倒检测模块有时也会发生误报或者聋盲症患者摔倒后并未对身体造成严重伤害可以自己独立起身的情况,为了排除这些情况,本设计专门设置了防误报模块。当摔倒检测模块中振动传感器检测到使用者摔倒,则通过语音模块报警。一段时间(约30 s)未恢复正确状态,GSM将发送报警信息至紧急联系人手机。语音报警时,如果聋盲症患者认为是误报警,则按键按下,停止语音报警,如果问题持续存在仍会继续报警,且短信处理过程有指示灯显示。
3.8 测试
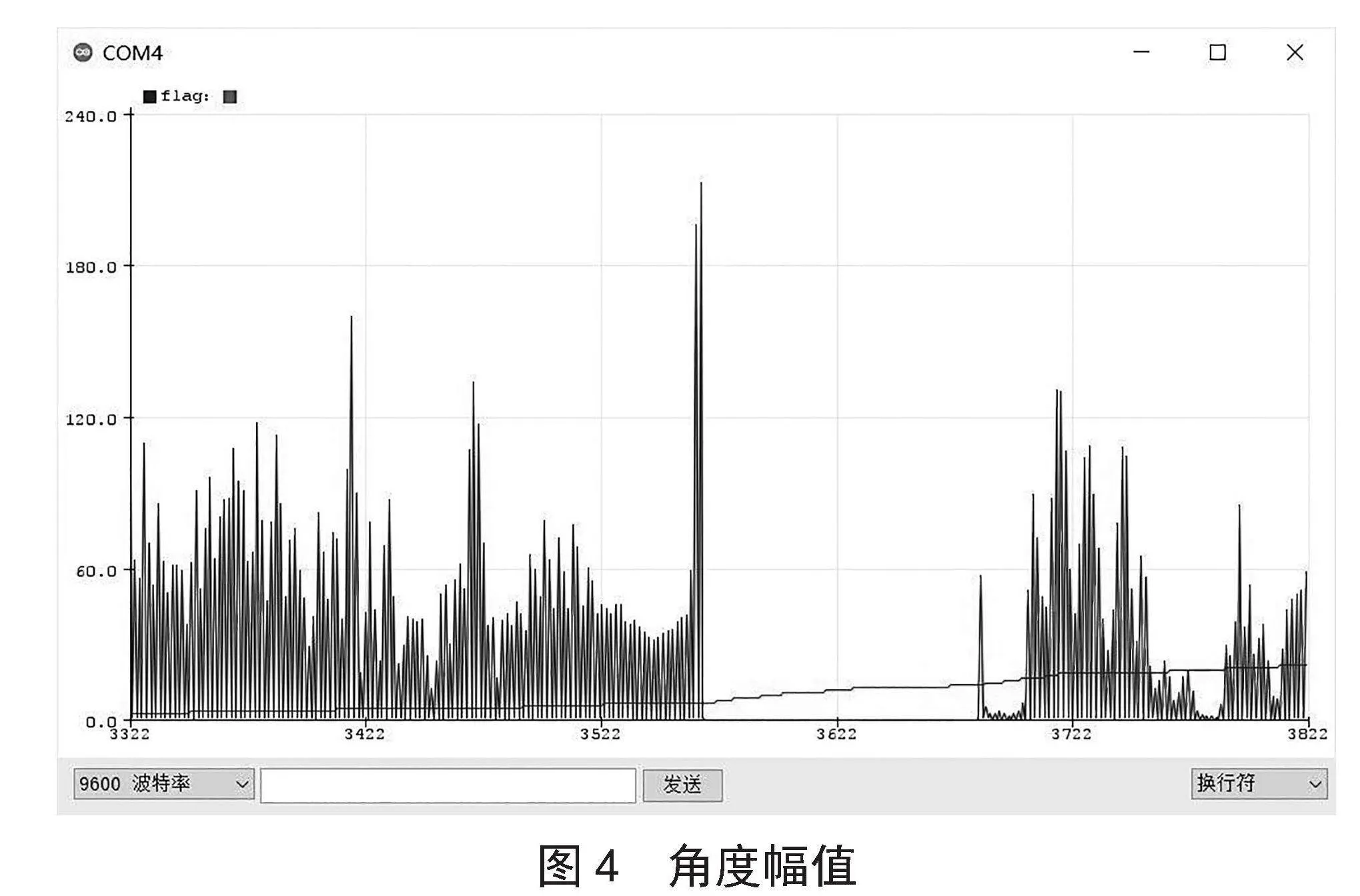
烧写程序对系统进行测试。对角度传感器的角度幅值进行监视,大于200阈值触发,判定为使用者摔倒,如图4所示。
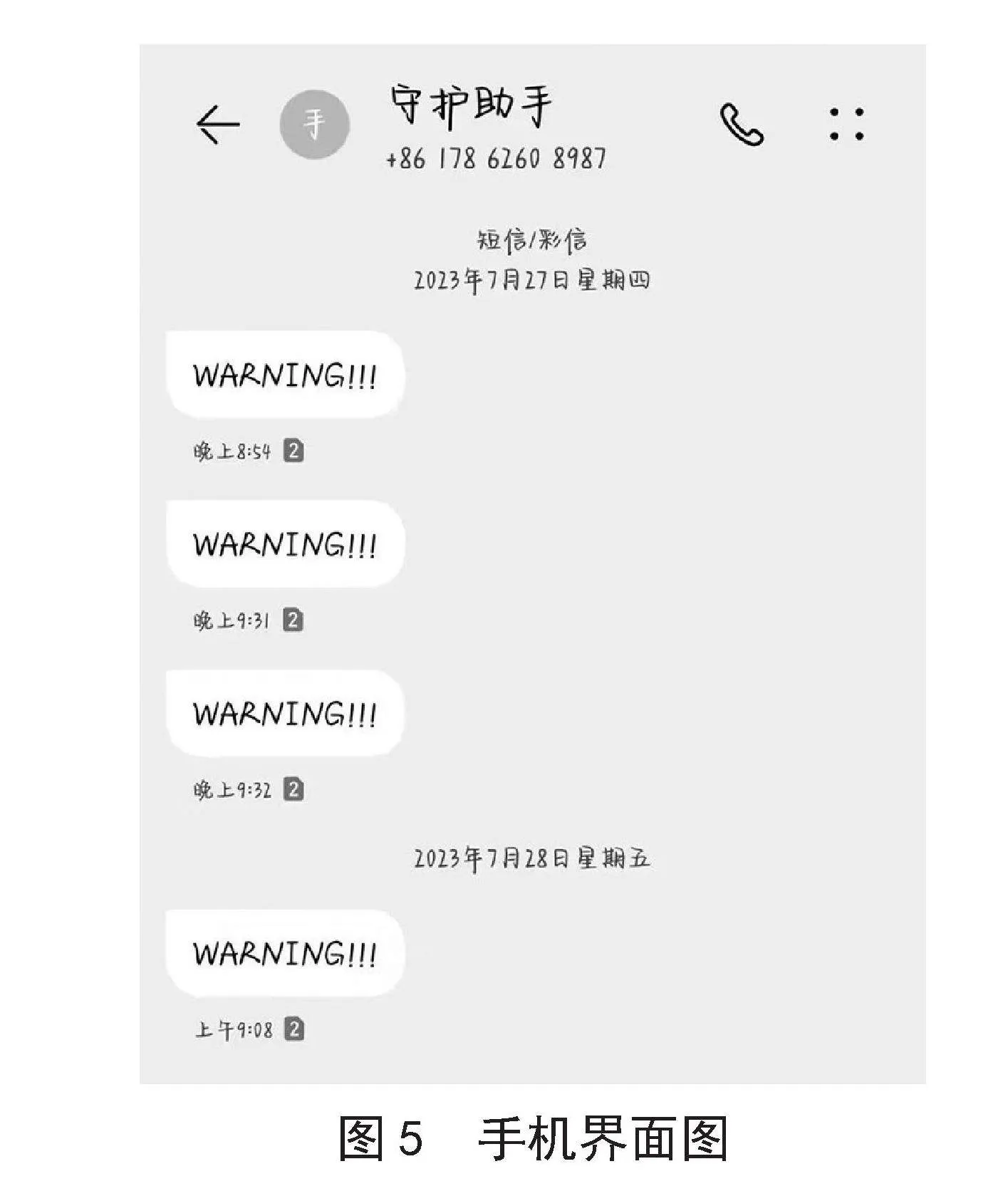
当使用者被判定为摔倒时,则进行语音播报请求路人帮忙,同时会向紧急联系人发送报警短信“WARNING!!!”,如图5所示。
4 结 论
该手杖主要通过测距模块与水浸传感器检测周围环境,并通过不同频率的震动来向使用者传递周围的环境信息,帮助聋盲症患者对当前路况做出判断。为防止意外的出现,我们还利用光照度传感器检测环境亮度,在能见度低的环境下灯光亮起,警示行人车辆及时避让。手杖可以通过震动触觉反馈为患者提供环境信息,帮助他们了解周围环境和障碍物的位置,从而避免碰撞和摔倒,增强他们对周围环境的感知能力,并设置摔倒检测语音求助模块,满足了聋盲症患者这一特殊群体的特殊需求,保障了他们的权益。
希望未来相关特殊群体产品的设计与发展更加注重人文关怀,从而帮助聋盲症患者更自信地行走,提高他们的独立性和生活质量,帮助他们更好地融入社会。
参考文献:
[1] 夏浩天.基于感官代偿在残障人士中的关怀性设计 [D].景德镇:景德镇陶瓷大学,2023.
[2] 胡淑钦.基于视障人士视角的出行公平与无障碍设施优化研究 [D].南京:东南大学,2021.
[3] 余娜娜.面向视障人群的导盲辅具设计研究 [D].广州:广东工业大学,2022.
[4] 高秀丽.环境感知下的盲用助行产品无障碍设计研究 [D].青岛:青岛理工大学,2021.
[5] 李岳,夏益民,蔡述庭,等.基于YOLOv5s的盲人出行辅助系统研究 [J].工业控制计算机,2023,36(12):15-17.
[6] 原姚姚.基于感性工学的盲杖造型设计研究 [D].北京:北京邮电大学,2021.
[7] 马倩倩.盲杖系统底层软件模块的开发 [D].哈尔滨:哈尔滨工业大学,2016.
[8] 耿晓明.无线数据传输水位监测仪的研究 [D].南京:南京理工大学,2009.
[9] 宋玉娥,刘业辉,张小燕,等.基于STM32的智能导盲杖的设计 [J].电子器件,2020,43(5):1180-1184.
[10] 朱钰龙,胡宸凤,窦研哲,等.基于物联网技术的老年人防走丢与摔倒警报系统的设计及实现 [J].物联网技术,2022,12(8):3-6.
作者简介:辛瑜(2003.03—),女,汉族,山东泰安人,本科在读,研究方向:机器人工程;郝传柱(1983.04—),男,汉族,山东聊城人,副教授,工程师,本科,研究方向:自动化、控制工程。