摘 要:为响应“新工科”的号召,促进创新创业人才的培养,文章结合2023年四川省大学生工程训练综合能力竞赛山地协同物流接力赛道,赛教合一,校企协同育人。对一种基于Arduino平台的智能移动全地形移动机器人进行研究。对机械结构、硬件模块和软件模块进行设计,使自主设计制作的全地形移动机器人实现自主循迹、窄桥爬坡、上楼梯、通过管道、信息交互扎破对应颜色气球的功能。通过该项目的训练,培养了大学生的工程创新意识,提升工程实践能力。
关键词:全地形移动机器人;结构设计;Arduino
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2024)17-0165-04
0 引 言
“新工科”强调工程实践能力、创新能力、具备国际竞争力的高素质复合型“新工科”人才[1-2]。智能制造机械与电子技术实现向电机一体化融合[3]。为了培养大学生工程创新意识,提升工程实践能力,促进创新创业人才培养。各创新比赛设置有智能越障小车、排爆机器人等赛道,赛教合一,把课堂内容换成比赛方式,以实战的形式,来锻炼学生的创新意识、实践能力和团队合作精神。本文结合四川省大学生工程训练综合能力竞赛2023年山地协同物流接力赛道,通过机械设计与电子信息结合,进行编程设定环境,使其成为一种具有在不规则路面行走、攀越滑坡和阶梯能力的智能移动机器人。
1 机械结构设计
1.1 设计思路
该智能移动机器人模仿四驱车形状设计,是一种小型化且便于拆装的四轮二段式结构。包括电动机安放的位置、轮子的选用、导向轮的设计,使其能够完美的通过障碍物以及扎破对应颜色气球等任务。障碍物分别为模拟工业用栅格地毯、楼梯、管道、窄桥。最终设计出一台拥有驱动电子能够自行行走、特殊轮子以及识别颜色并扎破气球的智能移动机器人。
1.2 设计方案及调试
1.2.1 机器人前进和越障设计
机器人要适应多种地形且能轻松越过障碍,采用三种轮子方案:1)轮子由铝轮片和塑料履带组成;2)双履带轮结构由铝轮片和塑料履带构成[4];3)模型轮胎+海绵外层。实验发现1)、3)结合能够得到较好的速度、转向性和稳定性。为了通过楼梯和管道障碍物,设计前轮为大轮,轮子中心高于楼梯高度。前轮设计为大轮,小车在隧道入口处碰到边缘时能够顺利进入,后小轮在转向时不会碰到管道内壁,提高了转向性能,小车能够精准的在隧道内拐弯行走[5]。为了解决通过窄桥轮子摩擦力较小,轮子原地打转的问题。设计将后轮粘上厚胶布,胶布具有较好的韧性,当小车有冲击力时,胶布被阶梯压缩增大了与阶梯表面的接触面积,摩擦力增加,解决了不能上阶梯的问题。
1.2.2 扎气球装置
用胶布将回形针固定在舵机的连接杆件上,在颜色识别传感器识别到气球颜色与需扎破气球的颜色返回值一致时,机器人停止,舵机旋转180°带动回形针扎破气球。该装置整体轻盈,能最大限度的降低小车质量,提升速度和稳定性。
1.2.3 总体结构设计
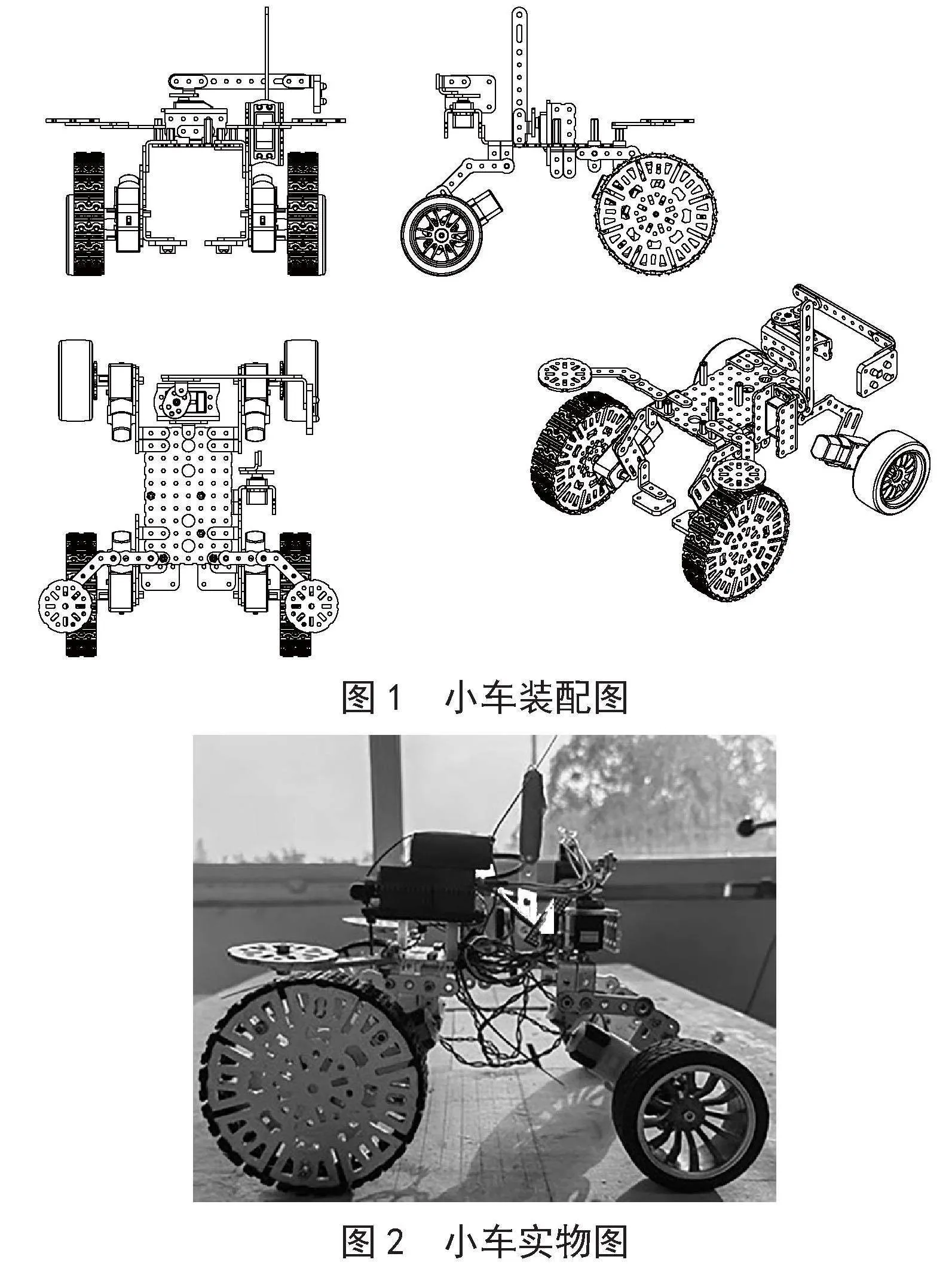
机器人选用简洁的四轮驱动方式以达到结构紧凑和减轻车体重量的目的。考虑到楼梯障碍,机器人使用大轮径前轮和小轮径后轮制造高度差以提高越障的性能。考虑到车体结构纵倾中心靠后,为防止移动机器人上坡仰翻,将控制主板和电池安装在车体中心靠前端,同时将舵机放在左侧和后侧。小车装配如图1所示,实物图如图2所示。
2 硬件模块设计
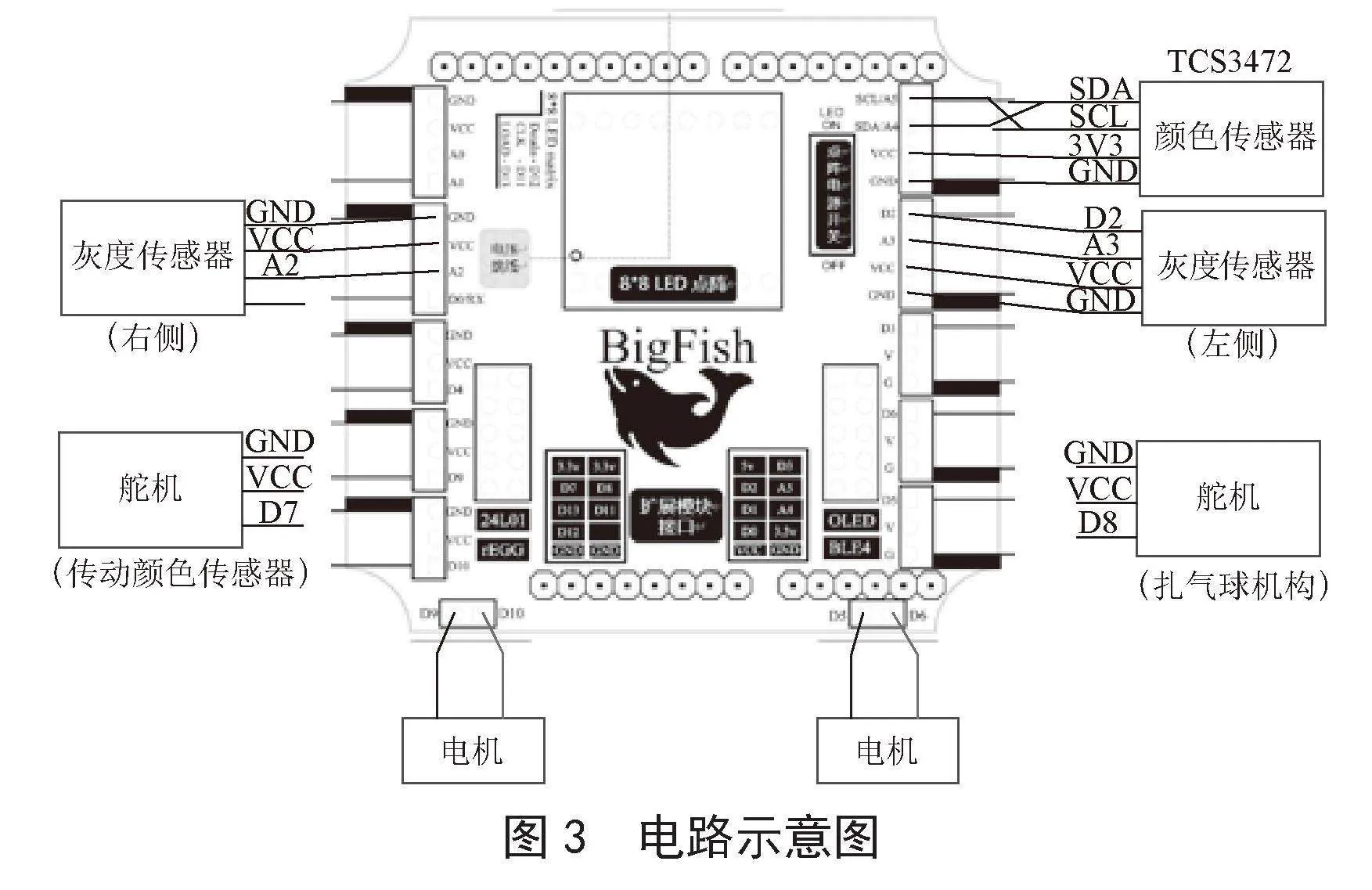
机器人选用控制器为Arduino UNO(主控板Barsa和扩展板BigFish)[6-9]。扩展板与主控板连接,扩展板D5脚、D6脚接控制左轮的直流电机;D9脚、D10脚接控制右轮的直流电机。A2、A3口连接2个灰度传感器,A4、A5口接颜色传感器;D8、D7接两个舵机[10]。电路示意图如图3所示。
2.1 灰度控制器
灰度控制器能够利用不同颜色的检测面对光反应不同其阻值也不同的原理来进行颜色深浅检测,外观如图4所示。
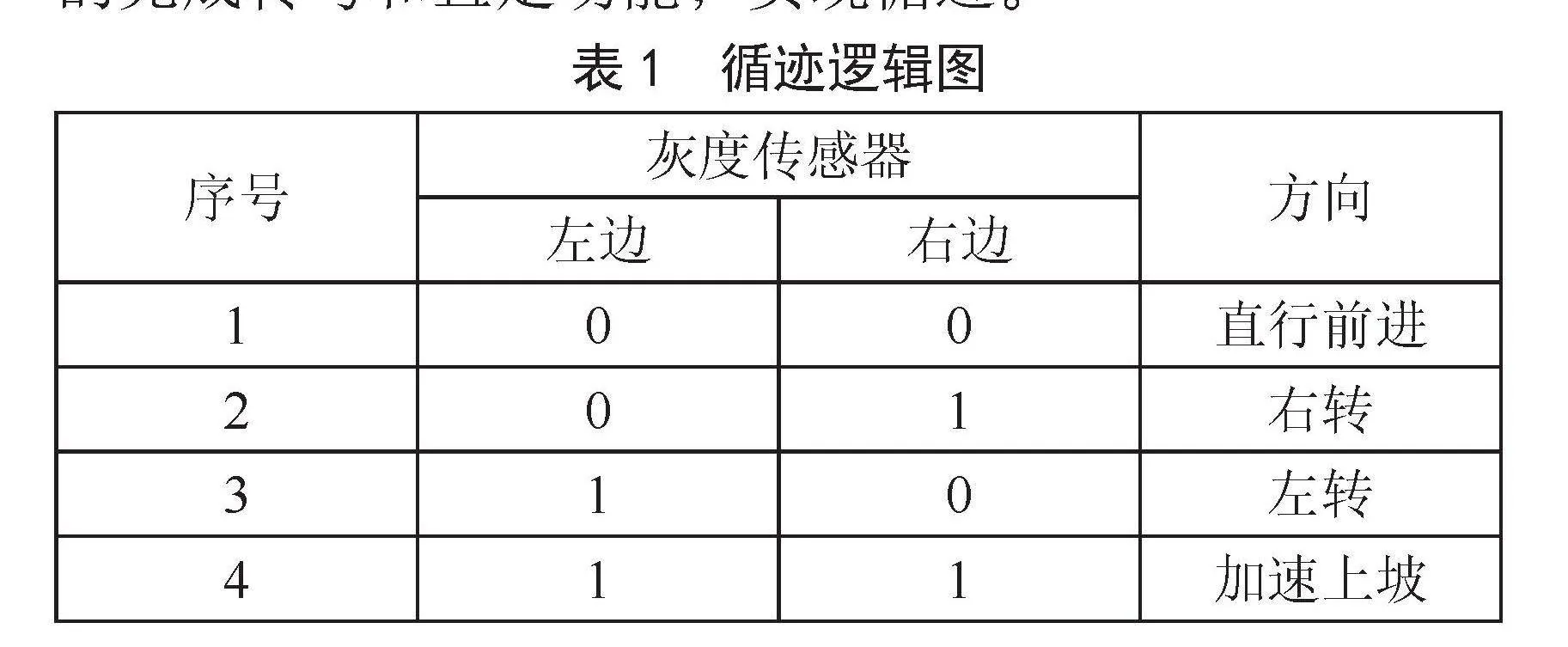
循迹部分:使用两个灰度传感器进行循迹。根据实际测量得到灰度传感器返回的2个特征值,将这两个值与设定阈值数组medium[2]比较。两个灰度传感器获取的值是小于medium[0],medium[1]的时候,可以由此判断左右两边都检测到黑线,由此直行;两个返回值中左边灰度返回值大于medium[0],右边小于medium[1]则实行向右转的方案;两个返回值中左边灰度返回值小于medium[0],右边大于medium[1]则实行向左转的方案。如果都没检测到就直行。循迹逻辑图如表1所示。经过不断地测试,两个灰度传感器配合电机的转动实现小车不论在隧道内外都能灵活的完成转弯和直走功能,实现循迹。
2.2 颜色识别
采用了TCS34725颜色传感器,外观如图5所示。引入了Adafruit_TCS34725.h库,其中Adafruit_TCS34725tcs=Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_120MS,TCS34725_GAIN_1X);此函数表示传感器积分时间,即传感器用来测量颜色的时间间隔。积分时间设置为120 ms,即传感器会在每次测量中花费120 ms收集数据。GAIN参数表传感器的增益,即传感器放大颜色信号程度。增益被设置为1倍,表示信号不会被额外放大。不同的增益级别适应不同的照明条件和应用场景。uint16_tr,g,b,c;首先声明了一些变量,用于存储传感器读取的数据,包括红色(r)、绿色(g)、蓝色(b)分量,总颜色强度(c),然后运用TCS34725库中的方法,赋值函数处理得到比例数。设定数组变量min_yanse_value1[3]和min_yanse_value2[3],把三个颜色临界点的值得出存在数组面,此时可以用临界点值与颜色传感器得出的值来判断颜色,并使用两个变量赋值以此存取检测到的颜色。使用定时器来控制两次颜色识别顺序,如果第一次识别到的信号灯颜色与气球颜色一样,实行扎气球行为。扎破气球后至标志位,然后计时在终点范围内停止。
3 软件模块设计
3.1 颜色识别代码
在计算机视觉和图像处理领域,颜色识别是一项重要的任务。它涉及从图像或视频中提取、分类和识别颜色信息。通过颜色识别,可以对图像进行分析、理解和解释,以下是小车颜色识别代码:
void yanse_shibie(int*value1,int*value2,int*frequency,int min_value1[3],int min_value2[3])//总颜色识别
{
tcs.getRawData(&r, &g, &b, &c);
r_1=r;b_1=b;g_1=g;
r_1 /= c;g_1 /= c;b_1 /= c;
r_1*= 256; g_1 *= 256; b_1 *= 256;
//以上部分是读取各个颜色的值并处理后赋给r_1,b_1,g_1
//这一部分是将读取的值拿来判断得到颜色
if(*frequency<16)//计次如果进入定时器小于16次进行第一次颜色识别
{
if(min_value1[0]
{
*value1=1;//赋值判断颜色,1代表红色
}
else if(min_value1[1]
{
*value1=2;//绿色
}
else if(min_value1[2]
{
*value1=3;//蓝色
}
}
else//如果计次大于16次进行第二次颜色识别
{
if(min_value2[0]
{
*value2=-1;
//Serial.print("红 ");
}
else if(min_value2[1]
{
*value2=-2;
//Serial.print("绿 ");
}
else if(min_value2[2]
{
*value2=-3;
//Serial.print("蓝 ")
}
}
}
3.2 扎气球代码
通过小车在舵机上的连接杆,使用颜色传感器进行目标检测,舵机带动连接杆进行旋转和刺破气球的操作,实现了全地形小车在不同环境下的气球刺破功能,以下是小车扎气球代码:
void task1()
{
if((yanse_value1==1yanse_value1==2yanse_value1==3)&&yanse_value2==0)//第一次颜色识别到后会将给yanse_value1赋值根据赋值判断颜色
{
xunji();
if(time>50&&zx1==0)
{
servo(servo_yanchuan,second_color_jiaodu);//颜传电机初始角度,识别到颜色后会将颜色传感器电机转动
zx1=1;
}
jici++;//计次等到一定次数时才进行第二次识别
}
if(yanse_value2!=0&&zhongzhi==0)
{
all_value=yanse_value1+yanse_value2;//将两次识别到的颜色标志位相加得到0说明识别到一样的颜色
if(all_value==0)
{
stop();//停止
servo(servo_zhaqiu,zhaqiu_jiaodu);//舵机转动扎球
zhongzhi=1;
delay(80000);
servo(servo_zhaqiu,yuanshi_jiaodu);//舵机转动回原位
}
}
}
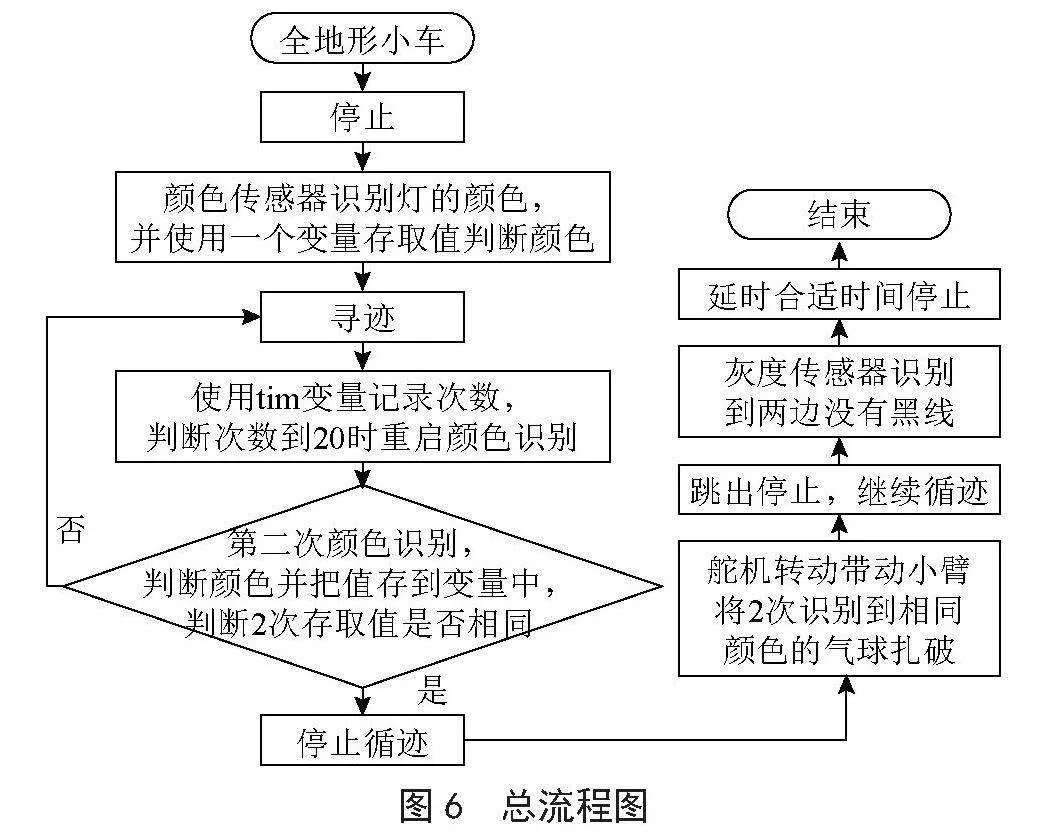
3.3 总流程设计
灰度传感器等模块开始工作,颜色传感器第一次识别信号灯的颜色,并使用一个变量存取值来判断颜色。然后执行寻迹方案。在循迹过程中,使用tim变量记录次数,判断次数到20时重启颜色识别,进行第二次颜色识别,如果相同便停止循迹,使用扎破气球装置将气球扎破,之后接着循迹,到合适时间停止循迹结束整个流程,如图6所示。
4 结 论
测试、调试完成智能移动机器人的设计,制造出一台智能移动机器人。该机器人能够自主循迹、窄桥爬坡、上楼梯、通过管道、信息交互扎破对应颜色气球。本次制作的智能移动机器人,有着独特的轮子结构,速度较快结构简单,有着强大的行动力能够应付阶梯等复杂地形。
参考文献:
[1] 孟宏君.新工科背景下高校机械电子专业人才培养路径探析 [J].教育理论与实践,2023,43(12):17-19.
[2] 王伟柯,陈帅兴,钟协城,等.基于树莓派控制的全地形小车研制 [J].机械,2023,50(8):63-68+74.
[3] 吴利刚,雷伟强,周倩,等.多方协同开展应用型本科院校智能制造新工科人才培养体系探究 [J].中国现代教育装备,2021(9)78-80.
[4] 郑灵洁,胡晓军,陈静仪,等.基于探索者平台的全地形机器人设计与实现 [J].湖州师范学院学报,2021,43(2):70-73.
[5] 牟文昌加,陈建宏.基于ATMEGA328控制器的全地形小车的设计与实现 [J].自动化技术与应用,2020,39(10):14-18.
[6] 任玲玲,李浪,闫庚龙,等.基于Arduino的蓝牙智能避障小车设计 [J].电子制作,2022,30(19):27-30+97.
[7] 郑才国,肖梁.全地形小车设计与实现 [J].现代机械,2019(3):44-47.
[8] 李志强,康钦清,肖玉亮,等.基于Arduino的智能小车设计与实现 [J].无线互联科技,2022,19(16):43-46.
[9] 刘孝贤,余江,郑徐凯,等.基于STM32的全地形越障排爆机器人设计 [J].机械,2022,49(9):76-80.
[10] 苏春锦.基于Arduino智能小车避障系统设计 [J].福建农机,2023(1):33-36.
作者简介:邢朝俊(2003—),男,汉族,河南上蔡人,本科在读,研究方向:机械设计;通信作者:冉龙姣(1987—),女,汉族,四川达州人,实验师,硕士,研究方向:机械设计。
DOI:10.19850/j.cnki.2096-4706.2024.17.032
收稿日期:2024-01-02
基金项目:2023年四川省大学生创新创业训练计划项目(S202311079050)
Production of Intelligent Mobile Robot Based on Arduino
XING Chaojun, RAN Longjiao, ZHONG Bin, LONG Qiujie, HUANG Anjie
(School of Mechanical Engineering, Chengdu University, Chengdu 610106, China)
Abstract: In response to the call for “Emerging Engineering Education” and in order to promote the cultivation of innovative and entrepreneurial talents, this paper combines with the Mountain Collaborative Logistics Relay Track of 2023 Sichuan University Students Engineering Training Comprehensive Ability Competition, which integrates competition and education, and realizes collaborative education between schools and enterprises. It studies an intelligent mobile all-terrain mobile robot based on Arduino platform. The mechanical structure, hardware module, and software module are designed, so that the independently designed and produced all-terrain mobile robot can realize the functions of autonomous tracking, narrow bridge climbing, climbing stairs, passing through pipes, and information interaction to pierce the corresponding color balloons. Through the training of this project, the engineering innovation consciousness of university students is cultivated and the engineering practice ability is improved.
Keywords: all-terrain mobile robot; structural design; Arduino