
摘" 要:针对药品运输工作量大、效率低下、传染病区域存在交叉感染等问题,开发一款由无线通信模块、红外避障模块、电机驱动模块、控制模块、承载模块于一体的药品运输机器人。通过寻迹算法结合各传感器模块与中央控制系统综合应用,实现了提前规划好的运输路线将药品准时准确运输,并及时提醒病人取药。使药品运输效率得到了保障,减少了工作负担,进一步保证了医疗工作的高效和安全,具有极大的发展潜力。
关键词:药品运输;机器人设计;控制模块
中图分类号:TP242.6" 文献标识码:A" 文章编号:2096-4706(2024)23-0194-05
Design of Intelligent Drug Transportation Robot
LI Jianchao, WANG Xuejun, SUN Changyong, HUANG Rong, ZHAI Xiaorui, ZHANG Xu
(School of Mechanical Engineering, Shandong Huayu University of Technology, Dezhou" 253034, China)
Abstract: Aiming at the problems such as the large workload, low efficiency and the existence of cross-infection in infectious disease areas of drug transportation, a drug transportation robot integrating wireless communication module, infrared obstacle avoidance module, motor drive module, control module and bearing module is developed. Through the comprehensive application of the tracking algorithm combined with each sensor module and the central control system, the pre-planned transportation route is realized to transport the drug on time and accurately, and the patients are reminded to take the medicine in time. It guarantees the efficiency of drug transportation, reduces the work burden, and further ensures the efficiency and safety of medical work, which has great potential for development.
Keywords: drug transportation; robot design; control module
0" 引" 言
随着中国经济社会的快速发展,各行各业对工作效率的要求不断提高。药品运输工作作为医疗行业最基本也是最重要的工作之一,直接影响了医疗场所的工作效率,且在传染病区域运输药品有严重的交叉感染风险,严重危机医务工作人员的安全。针对此问题,设计了一种可以高智能化搬运和运送药品的机器人,可以实现药品的自动运输。能够在完全没有接触的情况下完成药品的运送工作,既能送达到诸如病房或诊室等固定地点,也能送达到病人或医护人员指定的临时地点,便于取药。该设备可以提高药品运输效率,减缓医护人员或病人及家属的劳动强度,也可以提高传染病毒的防控能力。本产品的高智能化高机动性符合当今时代的发展方向。
1" 药品输机器人的研究现状
当今时代智能药品运输机器人研究主要在运动控制技术、感知与定位技术、管理系统等方面。机器人运动控制技术:智能药品运输机器人为了确保在存储和配送过程中的稳定性和准确性,所以对运动控制能力要求较高。当前大多数药品运输机器人通过运动学模型、动力学模型等,优化机器人的运动控制算法,提高其运动精度和稳定性。机器人感知与定位技术:当前药品运输机器人常采用传感器融合、机器学习等技术手段,提高机器人的感知和定位精度,使其能够实现自主导航和避障。机器人管理系统:智能药品运输机器人与上位机管理系统保持稳定的信息传输,实现药品信息的实时更新和管理。当前大多采用物联网、云计算等技术手段,构建机器人管理系统,实现机器人与上位机之间的信息交互和协同工作。
2" 药品运输机器人设计
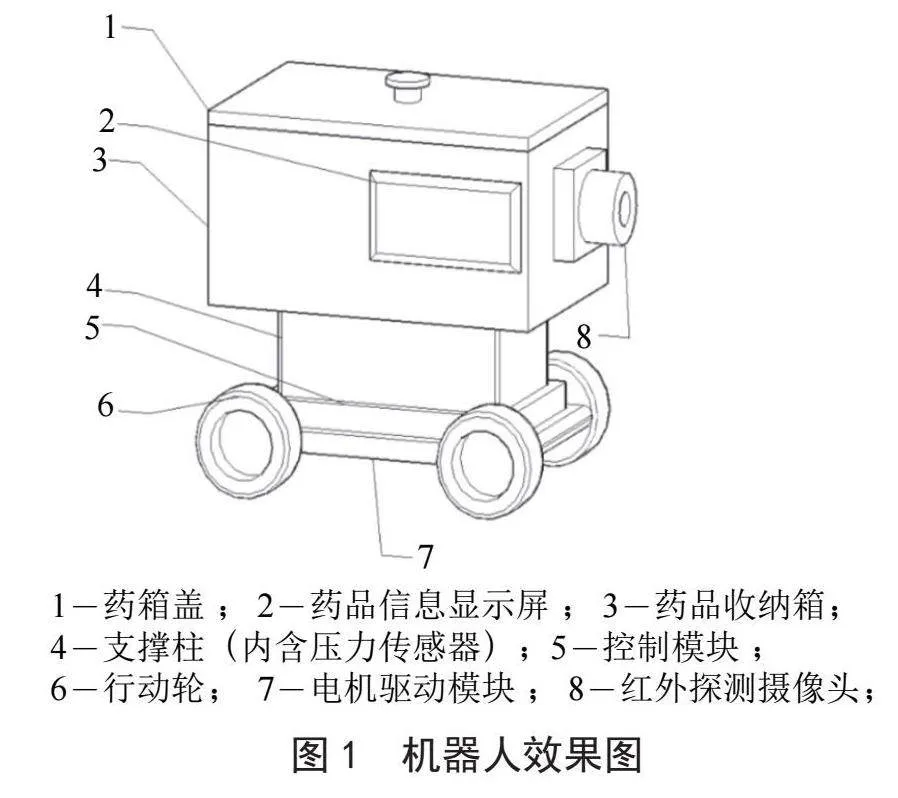
智能药品运输机器人以单片机作为控制核心,包含药品收纳结构、车体和控制系统等部分。设计并制作的药品运输机器人主体结构如图1所示。控制系统5由电源模块、药品监测模块、电机驱动模块、无线通信模块、路径跟踪模块、红外避障模块和基于机器视觉的数字识别模块等组成[1]。它具备药品运输、数字解码、自动导航、速度自适应等功能,能够实现药品的自动化运输。动力系统7由四个步进电机组成,直接连接在控制系统上,控制系统可直接控制机器人行走。
智能药品运输机器人工作原理:利用控制系统5中的电源模块对机器人整体进行供电,并利用移动设备连接控制系统中的蓝牙模块进行远程控制,在移动设备端可选取自动寻迹和手动操控两种模式。手动操控,机器人可在操控人员的指令下完成任务;自动寻迹,机器摄像头8启动识别场景内部铺设的黑线,控制系统5控制机器人沿黑线前行,在运输行程中通过红外避障模块完成避障功能[2]。黑线途中设有药品运输站点,在使用前输入停靠站点的编号,站点底部设有停靠芯片,当机器人检测到准确编号的芯片,机器人停靠等待病人取药。病人取完药后,压力传感器4感知车厢重量发生变化,前往下一个站点。
3" 机器人系统设计
3.1" 药品检测与寻迹避障
智能药品运输机器人的药品检测模块采用压力传感器装置。压力传感器通过感知药品的压力变化,判断药品的装卸及药品重量等信息。将压力传感器安装在药品收纳箱中,与药品直接接触。当药品放入药品收纳箱时,压力传感器感知到药品对药品收纳箱施加的压力,并将压力值转换为电信号传输给综合控制系统。综合控制系统对电信号进行处理,判断药品是否存在以及药品的重量等信息。为了提高检测精度和可靠性,用多通道压力传感器,对不同位置的药品包装进行压力检测,并对多个通道的压力值进行比较和校准。同时,可以采用多种类压力传感器,以适应不同类型和规格的药品包装。
采用红外避障探测模块,该模块拥有出较强的实用性。通过配置了一个红外线发射器和接收器,发射器能够发出特定频率的红外信号。在范围内,当遇到障碍物时,红外信号会被反射,进而被接收管接收,再经由比较器电路处理之后,进而输出数字信号。通过该模块也可以检查障碍物,对多个物体分层使用多个红外避障模块。
3.2" 控制模块
控制模块采用STM32F103系列单片机,如图2所示,内核是ARM Cortex-M3架构使得它具有出色的处理能力[3]和高效的指令执行速度能够快速地完成数据处理、信息统计和系统控制等任务。分配任务给小车时,STM32F103单片机负责接收并解析任务信息包括任务内容、目标位置、运输要求等。STM32F103单片机具有众多的I/O口,蓝牙模块、红外避障模块、摄像头模块等采集外部信息传输给STM32F103单片机,STM32F103单片机控制电机驱动模块完成寻迹、避障、停靠等任务,实现对智能药品运输机器人的控制。
STMF32F103系列单片机可以存放用户的程序和数据,中央微处理器CPU中有指令寄存器、指令译码器,程序计数器等部件,由程序计数器寻找下一条要执行的指令,后将指令送给指令寄存器,再由指令译码器翻译执行该指令,完成对指令功能的操作。在人机互动中使用STM32F103系列单片机,根据其数据处理能力和计算功能进而在智能机器人方面实现控制。
3.3" 无线通信模块
机器人通过连接模块内的微控制器串行端口,实现其他设备进行蓝牙连接。能够与其他设备进行数据传输和指令传达。无线通信模块采用蓝牙音频加数据传输模块。支持音频通信,具备高速数据传输能力,手机等移动设备可以与机器人进行实时通信。通过发送指令,用户可以精确地指示机器人前往医务人员或病人所在的区域,从而实现快速、准确的药品配送。此外,无线通信模块还提供了远程监控和数据同步的功能。用户可以通过手机等设备实时查看机器人的位置、工作状态和配送进度等信息,从而更好地掌握药品运输的实际情况。这一功能对于提高工作效率和确保医疗服务的及时性具有重要意义。无线通信模块为用户提供了便捷、高效的通信方式。通过蓝牙音频加数据传输模块的应用,机器人能够更好地服务于医疗行业和其他相关领域,为未来的智能化发展奠定坚实基础。
3.4" 循迹模块
图3为寻迹模块图,寻迹模块采用三路寻迹模块通过编程实现自动调整机器人行驶速度、准确地检测机器人的运动状态,包括转弯、变速等动作。三路寻迹模块可以提高机器人的智能性和适应性,使其能够更好地适应各种环境和任务。可以让机器人循迹,在自动运行时,机器人沿着黑线行驶,三路寻迹模块收集信号,以低电平信号传送给STM32单片机,遇到非黑线部分时就发出高电平信号给STM32单片机[4]。STM32单片机通过接收到的电平信号去判断电平高低,就能够做出相应的操作,实现基本的寻迹功能。
3.5" 电机驱动模块
此模块采用L298N电机驱动芯片支持PWM控制和过流保护等功能。本模块通过STM32单片机通过变换直流电流的方向控制电机的正反转[5],以此实现机器人的运动,通过控制PWM来调节工作电路内输出脉冲的占空比进而控制电机的转速,来实现智能运输机器人的运输功能。12 V两相混合步进电机对于每转200步的两相混合步进电机来说,其步进角度为1.8°,该步数为转子和定子上齿数的函数。该两相电机利用永磁体和带齿铁转子的工作方式,来实现高精度和高效率的旋转。
3.6" 电路与程序设计
3.6.1" 电路设计
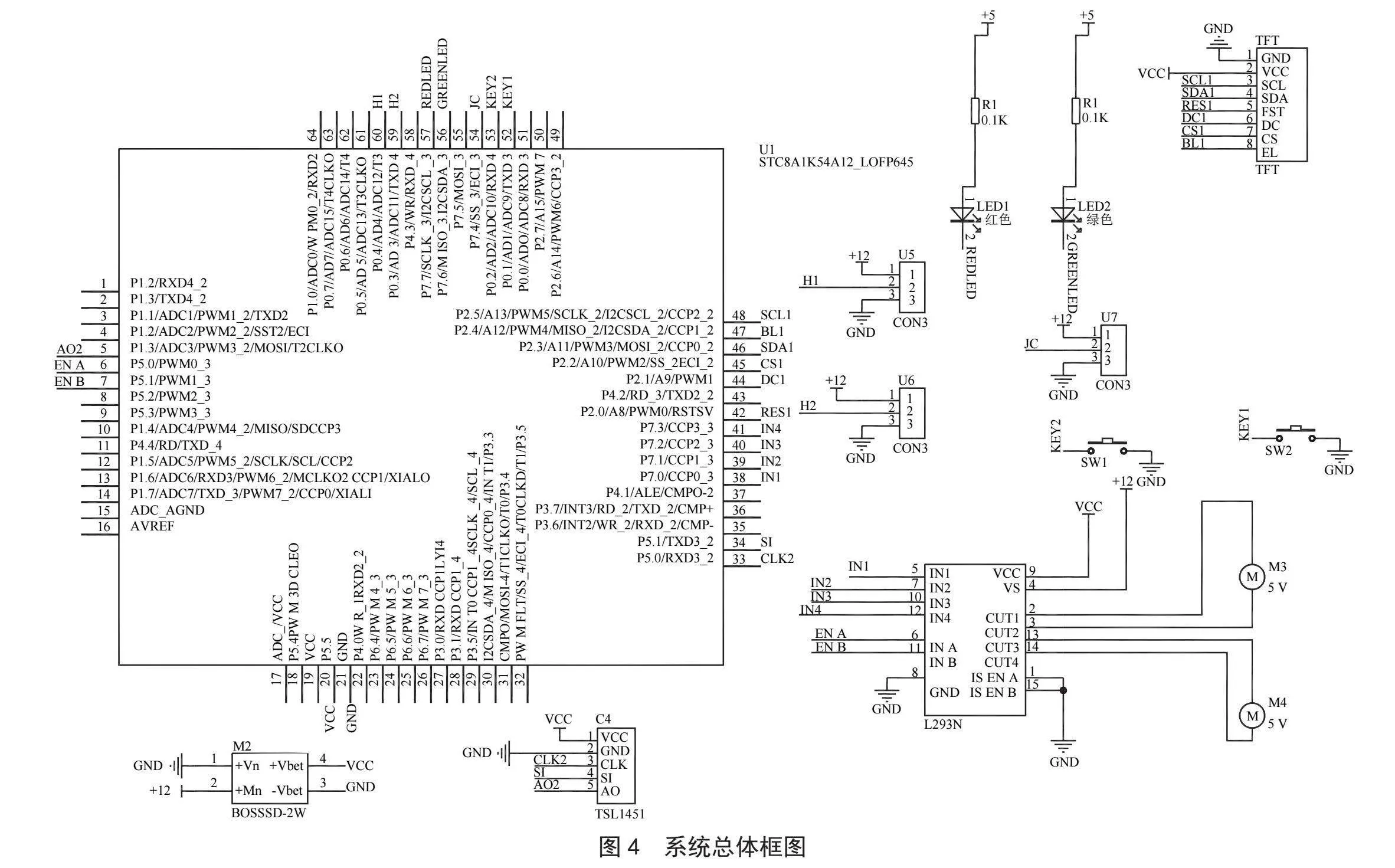
药品运输机器人的电路涵盖了电源管理、主控、传感器、通信、电机驱动等模块,如图4所示。电源管理模块确保机器人持续稳定的电力供应;主控模块作为核心,负责接收传感器数据并控制机器人的动作;传感器模块让机器人能够感知外界环境,实现精准导航和避障;通信模块实现机器人与中央控制系统和药品库之间的信息交互;电机驱动模块驱动机器人的运动机构;安全保护模块则确保机器人在运行过程中的安全性[6]。整体设计通过严格的测试和验证以确保电路的稳定性和可靠性。
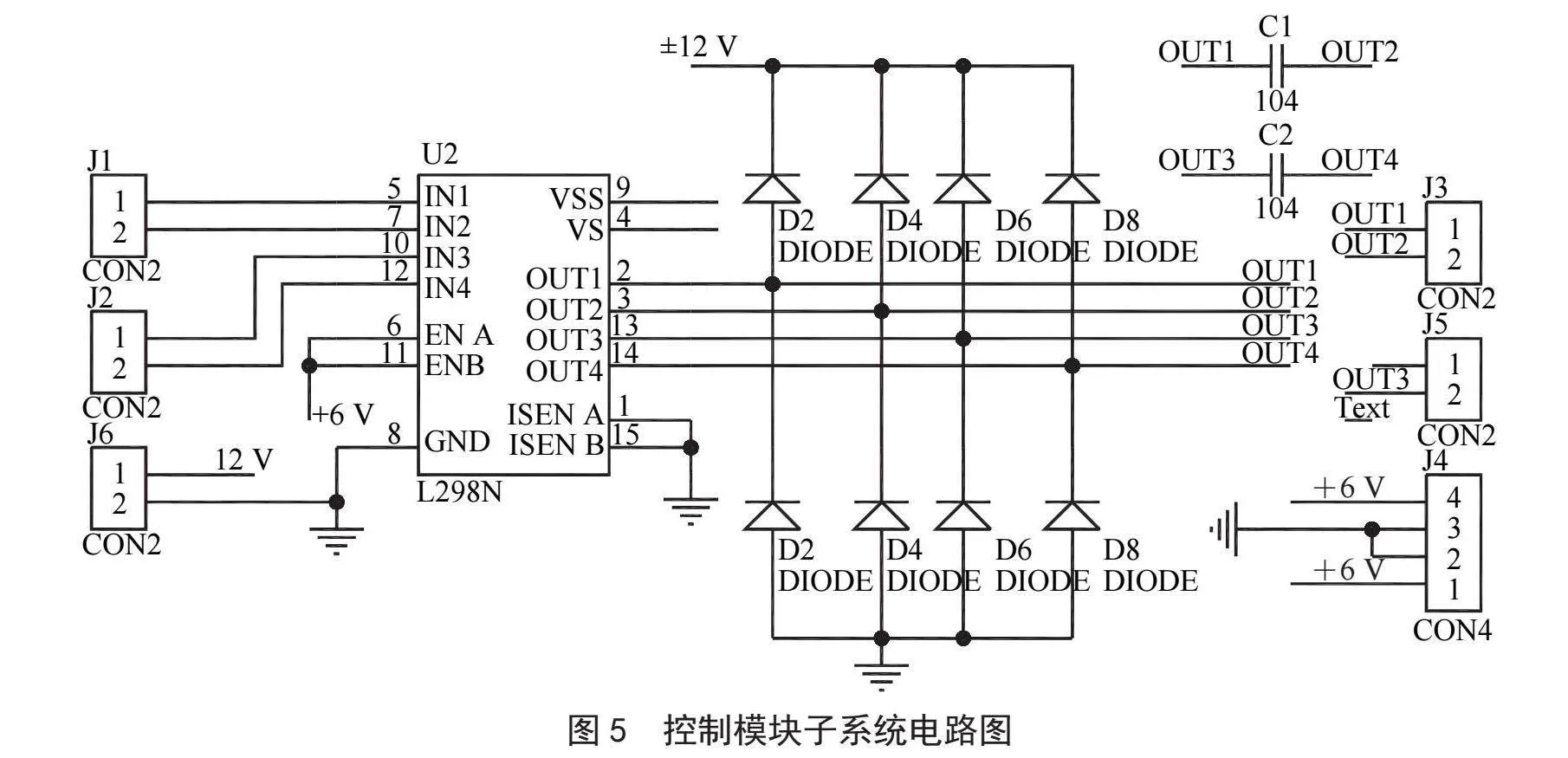
3.6.2" 电路原理图
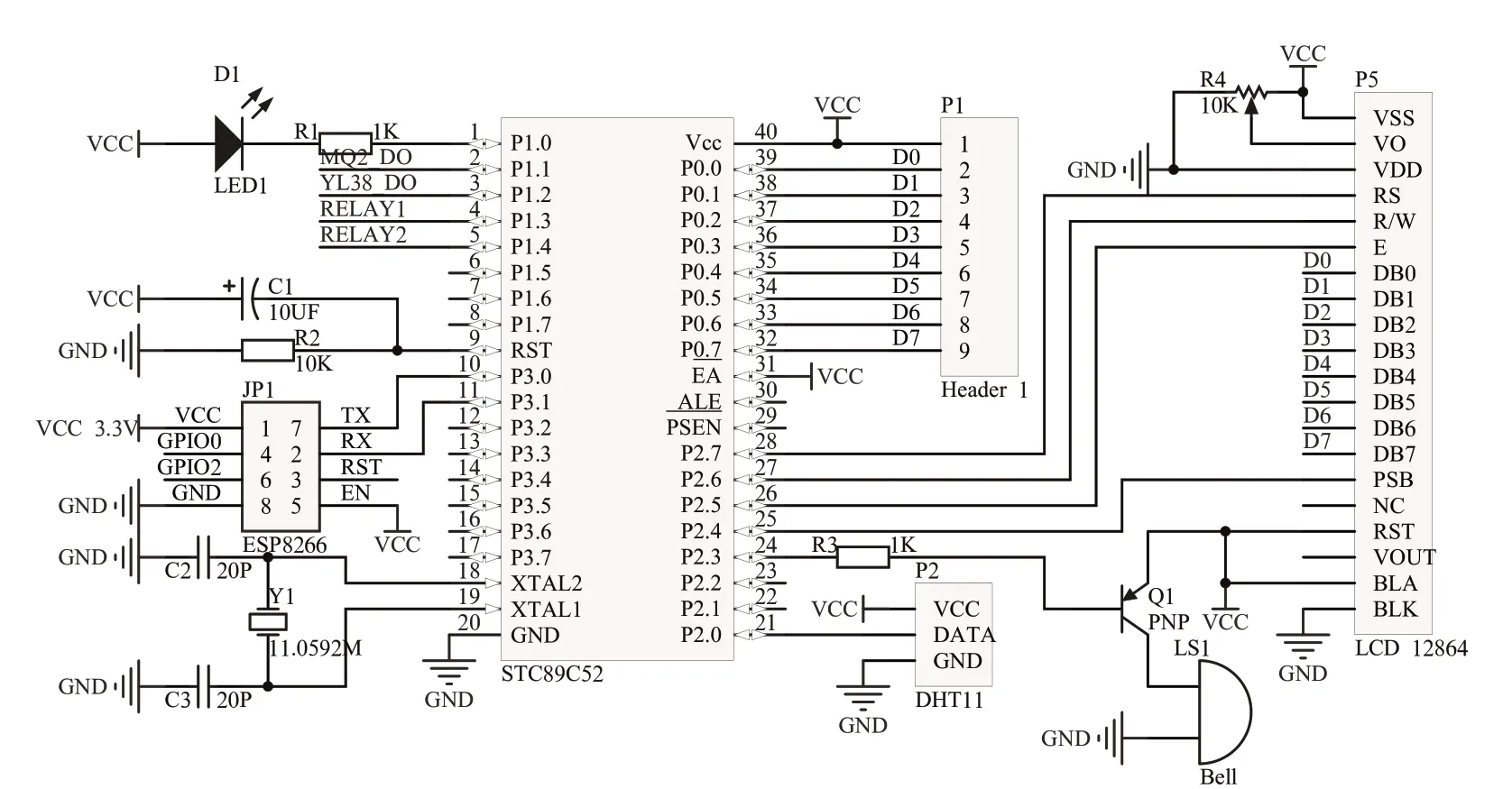
药品运输机器人的电路原理图详细展示了机器人的整体结构和功能。该原理图首先描述了电源部分,为机器人提供稳定的工作电压;然后,展示了主控模块作为电路核心,负责接收传感器信号并控制机器人动作;传感器模块负责感知外部环境信息,确保机器人精准导航和避障;通信模块则允许机器人与其他设备或系统进行数据交换;电机驱动模块控制机器人的运动机构;安全保护模块则确保机器人在运行过程中的安全性。此外,原理图还包含了辅助电路以提高系统的稳定性和可靠性[7]。整个电路原理图通过图形化的方式清晰地展示了各模块之间的关系和连接方式,如图5所示。
3.7" 程序设计思路
智能药品运输机器人的程序设计采取了一种分而治之的方法。将每个功能模块的程序进行独立设计,提取出其中的共通部分,形成可复用的程序组件。提高代码的复用性,增强程序的模块化程度。
控制模块、电机驱动模块和循迹模块、红外避障模块的设计。这些模块直接影响机器人完成识别数字、配送和返回的任务。控制模块是负责接收指令并驱动小车执行相应的动作。采用状态机设计模式,根据不同的状态和不同的输入信号,控制小车完成不同的动作。电机驱动模块采用PWM(脉冲宽度调制)技术,通过调整PWM的占空比,控制电机的转速和方向,从而达到对机器人的运动控制的效果[8]。循迹模块利用摄像头检测地面上的黑线,引导小车沿着预定的轨迹行进[9]。我们通过不断调整传感器的阈值,以适应不同的地面环境。在完成各个模块的独立设计后,进行整合,形成一个完整的程序。通过调用先前设计的公共部分程序,以及根据具体需求设计出的各个步骤特有的部分,实现整个智能药品运输机器人的程序设计。程序的性能和效率,通过调整PWM的占空比,保证机器人能够在规定时间内完成任务,提高程序的执行效率。
程序设计思路:首先提取出各个功能模块中共通的部分,形成可复用的程序组件;然后独立设计每个功能模块的程序;最后将各个模块整合在一起,形成一个完整的程序[10]。这样的设计思路提高了代码的复用性、减少冗余、增强程序的模块化程度,并确保小车能够准确、高效地完成任务。
3.8" 控制流程图及实物图
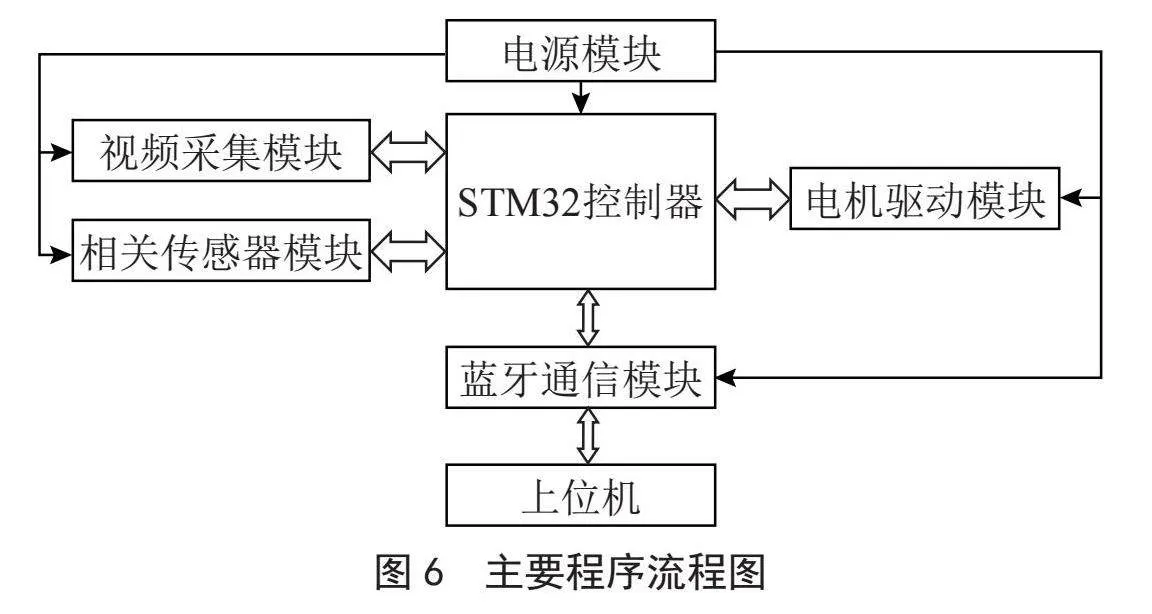
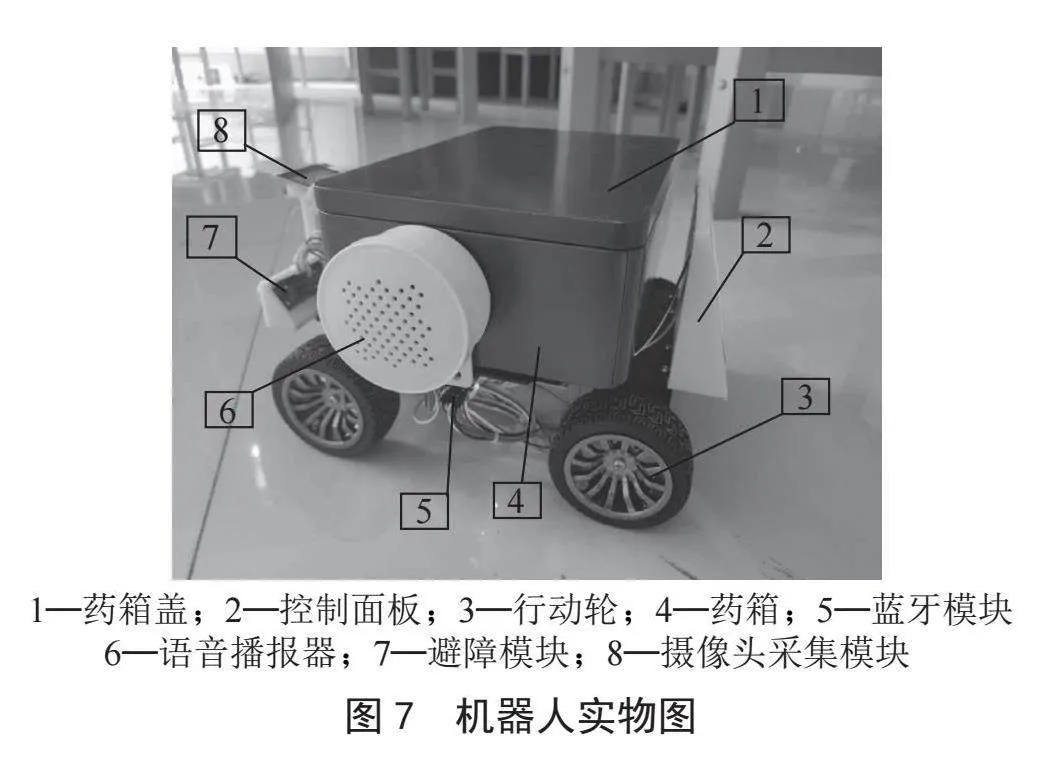
图6为主要程序流程图,首先电源模块通电,STM32控制器启动控制摄像头采集模块和传感器模块工作采集外部环境信息,选择手动控制端工作方式,摄像头采集模块和传感器模块向STM32控制器传输寻迹轨道和机体信息,控制系统控制电机驱动模块启动,准备开始药品运输工作,工作人员通过上机位连接蓝牙向中央控制系统发布工作指令,机器人通过铺设好的黑线轨道并在途中超红外避障模块不断向STM32单片机传输信息,STM32单片机控制电机驱动模块完成避障。机器人实物图如图7所示。
4" 结" 论
本文研究了一种基于STM32单片机的智能药品运输机器人,通过摄像头信息采集模块、无线通信模块、电机驱动模块、药品检测与红外避障模块,实现了药品的高效、定点运输。该机器人不仅解决了医疗行业中药品运输工作量大、人力成本高的问题,更在传染病区等高风险环境中有效避免了交叉感染的风险,显著提升了医疗资源的利用效率和工作效率。随着技术的不断发展和应用的进一步推广,智能药品运输机器人将在未来医疗领域发挥更加重要的作用,为医疗行业的现代化和智能化发展注入新的活力。
参考文献:
[1] 张雄伟.基于视觉导航的缩微车智能驾驶系统设计 [D].沈阳:东北大学,2014.
[2] 黄永涛,王功,刘春瑞.基于单片机的智能小车避障系统的设计与实现 [J].科学技术创新,2021(1):75-76.
[3] 张仕健,胡伟武.一种向分支指令后插入冗余指令的容错微结构 [J].计算机学报,2007(10):1674-1680.
[4] 王瑞鹏,段奇凯,高程,等.基于嵌入式STM32的防盗钱包设计 [J].电子设计工程,2022,30(6):127-130+135.
[5] 黄充,刘源杰,何玉灵,等.基于STM32的全向移动机器人设计 [J].信息记录材料,2022,23(9):210-213.
[6] 曲翠翠.工业机器人在自动化生产线分拣站的应用要素探索 [J].电子元器件与信息技术,2022,6(8):113-116.
[7] 于洋,刘晶,王迪,等.多格式信号采集处理模块的研究实现 [J].电子设计工程,2020,28(21):93-97+102.
[8] 吴鹏浩,徐梦如,窦浩鹏,等.基于STM32单片机的扫地机器人设计 [J].智能计算机与应用,2019,9(6):248-250+253.
[9] 高凤水,靳涛,赵书朵.基于飞思卡尔单片机的智能车设计 [J].电子设计应用,2008(5):104-106.
[10] 王磊.基于DM642的人脸检测系统 [D].苏州:苏州大学,2015.
作者简介:李建超(2003—),男,汉族,山东德州人,本科在读,研究方向:机械电子工程。