摘" 要:伴随着室外定位系统的成熟,人们对室内定位的需求逐渐增大,然而,面对复杂的室内定位环境,单一室内定位技术无法实现高精度的定位。Wi-Fi定位技术和PDR定位技术是常用的室内定位技术,其中PDR定位技术存在累计误差,定位稳定性较差,无法长时间单独使用,Wi-Fi定位技术易受到室内复杂环境影响。为了减小PDR和Wi-Fi定位技术的误差,得到更精确的定位结果,针对两种定位技术的优点与局限性,文章提出了两种融合算法:加权融合定位算法、基于扩展卡尔曼滤波的融合定位算法。融合算法减小了累计误差对PDR定位结果的影响,同时提高了Wi-Fi定位的精度。实验结果表明,文章提出的算法相比单一定位技术和加权融合定位算法,有更好的定位精度和稳定性。
关键词:室内定位;Wi-Fi指纹定位;PDR定位;融合定位
中图分类号:TN953;TP301.6 文献标识码:A 文章编号:2096-4706(2025)04-0015-07
Research on Indoor Fusion Positioning Algorithm Based on Wi-Fi/PDR
WU Zhigao1,2, HUANG Kangni1,2, LONG Keliu1,2
(1.School of Information Engineering, Jiangxi University of Science and Technology, Ganzhou" 341000, China; 2.Jiangxi Province Key Laboratory of Multidimensional Intelligent Perception and Control, Ganzhou" 341000, China)
Abstract: With the maturation of outdoor positioning systems, the demand for indoor positioning has gradually increased. However, facing the complex indoor positioning environments, no single indoor positioning technology can achieve high-precision positioning. Wi-Fi and Pedestrian Dead Reckoning (PDR) positioning technologies are commonly used indoor positioning technologies. And PDR suffers from cumulative errors and poor stability, making it unsuitable for long-term standalone use, while Wi-Fi positioning technology is easily affected by the complex indoor environments. To reduce the errors associated with PDR and Wi-Fi positioning technologies and obtain more precise positioning results, this paper proposes two fusion algorithms of a weighted fusion positioning algorithm and a fusion positioning algorithm based on the Extended Kalman Filter (EKF). The fusion algorithms reduce the impact of cumulative errors on PDR positioning results while improving the precision of Wi-Fi positioning. Experimental results show that the proposed algorithm in this paper offers better positioning precision and stability compared to standalone positioning technology and the weighted fusion positioning algorithm.
Keywords: indoor positioning; Wi-Fi fingerprint positioning; PDR positioning; fusion positioning
0" 引" 言
引随着互联网技术的快速发展与普及,人们对于室内位置信息的需求日益增加,推动了室内定位领域的快速发展。面对复杂的室内定位场景,出现了多种室内定位技术,包括:UWB定位、蓝牙定位、红外线定位、超声波定位、PDR定位和Wi-Fi定位等[1]。每种室内定位技术都有着各自的优势与局限,单一的定位技术难以得到精确稳定的定位结果,无法满足人们对室内定位的需求。因此,目前较为流行的室内定位解决方案是进行融合定位[2],通过融合定位的方法,充分利用不同定位技术的优势,实现融合后的定位算法拥有更好的定位性能。
PDR[3]是一种使用加速度计、磁力计和陀螺仪传感器等设备确定人的运动状态的位置估计技术。就目前情况而言,PDR设备价格低廉,信息易获取,该技术不易受环境影响,可以在短时间内提供较高精度的位置信息[4]。然而,由于设备在识别步长、运动方向时会产生一定误差,导致系统误差随时间推移累计,从而严重影响定位精度和准确性。
Wi-Fi定位技术[5]具有许多优势。首先Wi-Fi热点分布范围广,普及度高,已广泛应用于各种室内环境[2]。Wi-Fi设备价格低廉,灵活性高,具有较高的稳定性,能够支持长时间提供定位服务。然而,Wi-Fi信号的传输易受到复杂环境的影响,在复杂的室内环境下难以提供高精度定位结果。
针对PDR定位技术和Wi-Fi定位技术存在的不足,国内外研究学者提出了不同的解决方法。Mehrabian开发了一种称为基于权重的优化的新型滤波器来优化初始RSSI值,并使用传感器融合方法将RSSI和PDR方法的结果相结合的融合定位法[6],得到了更精确的定位结果。韩笑是通过改进PDR定位技术的步长、步数估计算法和提出基于RWF算法的Wi-Fi指纹定位技术,提高了单一定位技术的定位性能,并提出了基于无损卡尔曼滤波的Wi-Fi/PDR融合定位算法[7],融合后的定位算法其定位性能优于单一定位算法。郝森鑫提出了一种KNN+SVM的组合算法[8],该算法能够有效地减少Wi-Fi指纹库中RSS干扰的奇异点,提高了Wi-Fi室内定位精度。同时,提出了基于扩展卡尔曼滤波的INS/PDR融合算法。但该研究者只研究了二维空间的目标点定位,在实际生活中,多数情况都需要进行三维空间内的定位。Chen提出了一种基于PDR、磁匹配(MM)和Wi-Fi的室内多元融合定位方法[9],该方法提出了一种增强动态时间扭曲(EDTW)技术来计算磁指纹之间的距离,并通过扩展卡尔曼滤波对多源定位信息进行融合。该算法能够提供较为精确的定位结果,具有一定优越性,然而该方法易受环境影响,缺乏一定稳定性。Liu等人提出一种由多个扩展卡尔曼滤波(EKF)组成的自适应滤波系统和一种新的异常值检测方法[10],设计了基于联邦滤波器(FF)的融合算法,将Wi-Fi RTT与PDR进行融合,与经典的基于EKF的融合方法相比,该方法的平均定位误差降低明显。综上所述,目前的室内定位融合方向,都倾向于首先对于单一种定位技术进行算法优化,通过提高单一定位技术的精确度和鲁棒性,进而根据不同的定位技术的优点和缺点,通过室内定位融合手段,对多种定位手段进行互补,以建立高精准度、高鲁棒性的定位系统。
在经典的室内定位中,PDR定位技术定位误差会随着时间的推移而累积,不适合长时间单独使用,Wi-Fi定位易受复杂环境影响,定位精度降低。为解决以上问题,本文提出一种Wi-Fi/PDR融合定位算法。首先通过Wi-Fi指纹识别得到Wi-Fi定位坐标,使用PDR技术获得PDR定位结果,随后分别使用加权和EKF的方式对得到的两种定位结果进行融合。其中,EKF融合方式的效果更好。该方法充分利用了两种不同定位技术的优点,以获得高精度的定位结果。
1" Wi-Fi指纹定位
Wi-Fi指纹定位的原理主要是利用RSSI值会随着传播距离的变长,RSSI值也会随之发生变化,根据在不同位置的RSSI值的不同作为环境的特征,将RSSI与室内环境中的各个位置映射匹配,实现对用户的定位[11]。基于位置指纹的方法的定位过程主要分为两大阶段:离线构建指纹数据库阶段、在线匹配定位阶段。
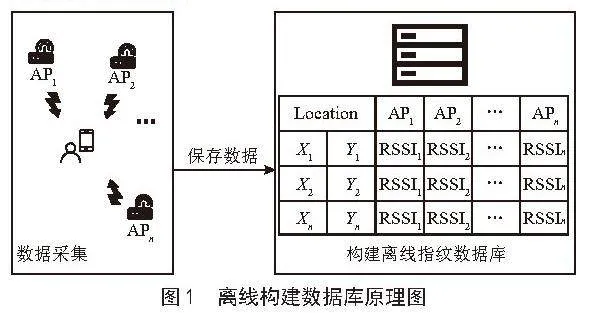
1.1" 离线构建指纹数据库阶段
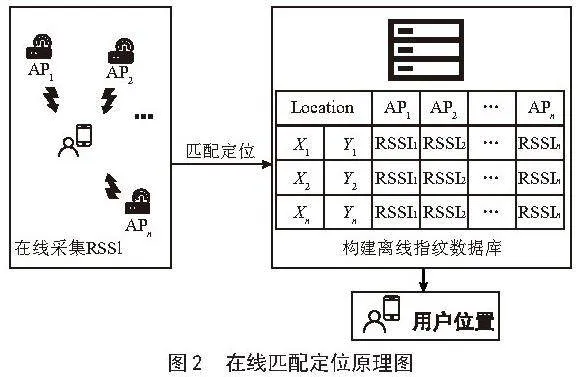
在离线构建指纹数据库阶段,首先将室内环境以一定间隔分成多个区域,以该区域的中心点为指纹参考点,用户在不同的指纹参考点对各个AP热点发生的RSSI值进行采集记录,将RSSI数据和对应的指纹参考点的位置坐标进行保存,构建离线指纹数据库,原理如图1所示。
1.2" 在线匹配定位阶段
在在线匹配定位阶段,用户持设备在室内环境中实时采集RSSI的值,将采集到的RSSI值利用预定设置好的指纹匹配算法,一一对比离线指纹数据库中的RSSI值,寻找出与用户相似程度最高的Wi-Fi指纹,实现用户的估计位置,原理如图2所示。
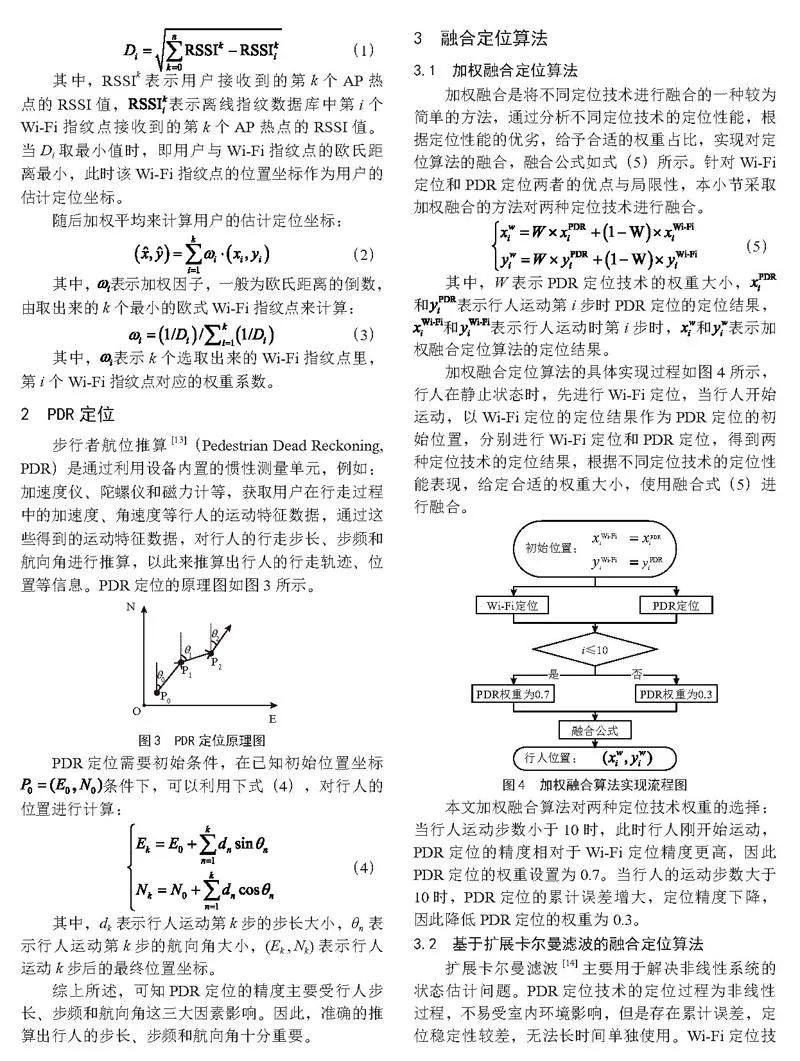
本文中Wi-Fi指纹定位采用的指纹匹配算法为加权K近邻(Weighted K-Nearest Neighbor, WKNN)算法[12]。该算法的基本原理为:计算用户接收到的RSSI值与离线指纹数据库中各Wi-Fi指纹点之间的RSSI的欧式距离Di,比较这些欧氏距离,并选取出k个欧氏距离最小的Wi-Fi指纹点,通过加权平均的方式来计算用户的估计定位坐标。具体的计算过程为:
假设在室内环境中共有n个AP热点,设置了M个参考点。欧式距离的计算式(1)如下:
(1)
其中,RSSIk表示用户接收到的第k个AP热点的RSSI值,表示离线指纹数据库中第i个Wi-Fi指纹点接收到的第k个AP热点的RSSI值。当Di取最小值时,即用户与Wi-Fi指纹点的欧氏距离最小,此时该Wi-Fi指纹点的位置坐标作为用户的估计定位坐标。
随后加权平均来计算用户的估计定位坐标:
(2)
其中,表示加权因子,一般为欧氏距离的倒数,由取出来的k个最小的欧式Wi-Fi指纹点来计算:
(3)
其中,表示k个选取出来的Wi-Fi指纹点里,第i个Wi-Fi指纹点对应的权重系数。
2" PDR定位
步行者航位推算[13](Pedestrian Dead Reckoning, PDR)是通过利用设备内置的惯性测量单元,例如:加速度仪、陀螺仪和磁力计等,获取用户在行走过程中的加速度、角速度等行人的运动特征数据,通过这些得到的运动特征数据,对行人的行走步长、步频和航向角进行推算,以此来推算出行人的行走轨迹、位置等信息。PDR定位的原理图如图3所示。
PDR定位需要初始条件,在已知初始位置坐标 条件下,可以利用下式(4),对行人的位置进行计算:
(4)
其中,dk表示行人运动第k步的步长大小,θn表示行人运动第k步的航向角大小,(Ek , Nk)表示行人运动k步后的最终位置坐标。
综上所述,可知PDR定位的精度主要受行人步长、步频和航向角这三大因素影响。因此,准确的推算出行人的步长、步频和航向角十分重要。
3" 融合定位算法
3.1" 加权融合定位算法
加权融合是将不同定位技术进行融合的一种较为简单的方法,通过分析不同定位技术的定位性能,根据定位性能的优劣,给予合适的权重占比,实现对定位算法的融合,融合公式如式(5)所示。针对Wi-Fi定位和PDR定位两者的优点与局限性,本小节采取加权融合的方法对两种定位技术进行融合。
(5)
其中,W表示PDR定位技术的权重大小,和表示行人运动第i步时PDR定位的定位结果,和表示行人运动时第i步时,和表示加权融合定位算法的定位结果。
加权融合定位算法的具体实现过程如图4所示,行人在静止状态时,先进行Wi-Fi定位,当行人开始运动,以Wi-Fi定位的定位结果作为PDR定位的初始位置,分别进行Wi-Fi定位和PDR定位,得到两种定位技术的定位结果,根据不同定位技术的定位性能表现,给定合适的权重大小,使用融合式(5)进行融合。
本文加权融合算法对两种定位技术权重的选择:当行人运动步数小于10时,此时行人刚开始运动,PDR定位的精度相对于Wi-Fi定位精度更高,因此PDR定位的权重设置为0.7。当行人的运动步数大于10时,PDR定位的累计误差增大,定位精度下降,因此降低PDR定位的权重为0.3。
3.2" 基于扩展卡尔曼滤波的融合定位算法
扩展卡尔曼滤波[14]主要用于解决非线性系统的状态估计问题。PDR定位技术的定位过程为非线性过程,不易受室内环境影响,但是存在累计误差,定位稳定性较差,无法长时间单独使用。Wi-Fi定位技术易受到室内环境影响,但不存在累计误差,在长时间的定位使用中,能保持稳定的定位精度。
结合两种定位技术的优点和局限性,本文采用扩展卡尔曼滤波对两种定位技术进行融合,以Wi-Fi定位技术的定位结果为观测值,PDR定位技术的定位结果为状态估计值,构造定位系统,实现对两种定位技术的融合。
定位系统的状态向量和观测向量为:
(6)
其中,xk和yk表示预测的第k步的位置坐标,表示预测的第k步的行人航向角,和表示在k时刻Wi-Fi指纹定位的定位坐标。
系统的状态方程为:
(7)
观测方程为:
(8)
其中,W表示系统状态方程的高斯白噪声向量,V表示系统观测方程的高斯白噪声向量,且两者相互独立;xk-1和yk-1表示在k-1时刻得到的融合定位的定位坐标,sk-1表示在k-1时刻得到的步长,表示在k-1时刻得到的行人航向角,表示行人航向角的预计增量。对非线性部分进行泰勒展开,可得状态转移矩阵Ak为:
(9)
观测矩阵Hk为:
(10)
初始协方差矩阵P1为:
(11)
系统过程协方差噪声矩阵Q和观测噪声协方差矩阵R为:
(12)
(13)
其中,和分别表示PDR定位的在X轴和Y轴上的定位方差,表示航向角的方差,和表示Wi-Fi指纹定位在X轴和Y轴上的定位方差。
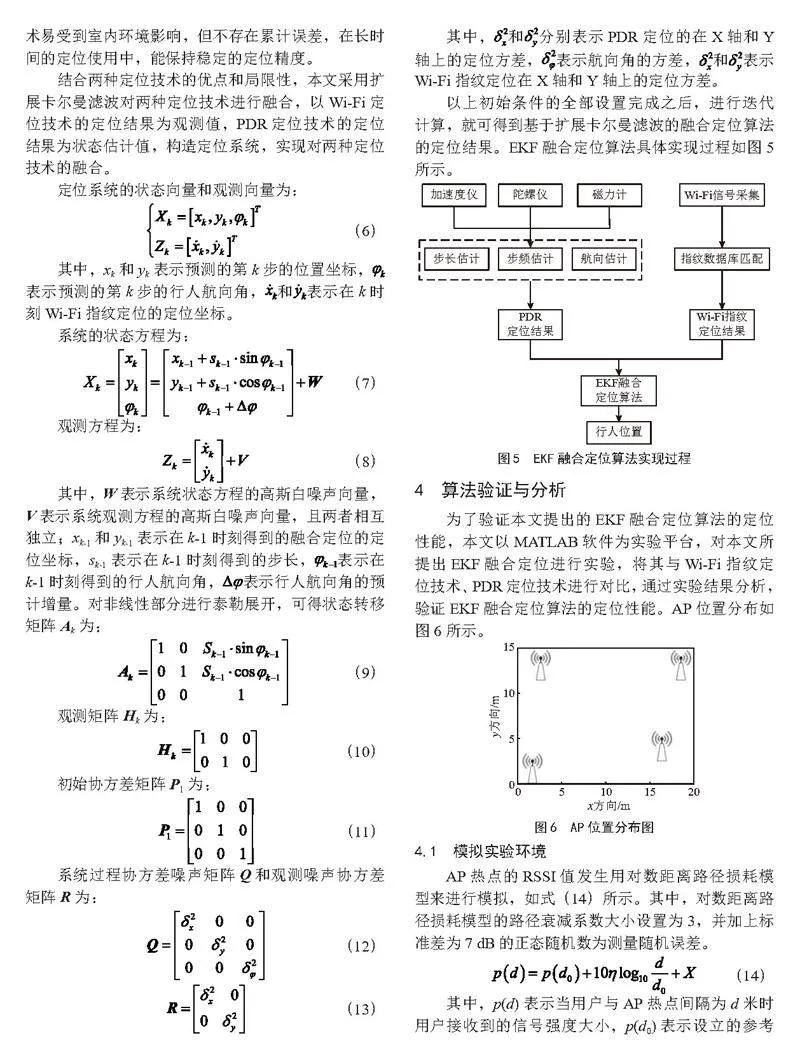
以上初始条件的全部设置完成之后,进行迭代计算,就可得到基于扩展卡尔曼滤波的融合定位算法的定位结果。EKF融合定位算法具体实现过程如图5所示。
4" 算法验证与分析
为了验证本文提出的EKF融合定位算法的定位性能,本文以MATLAB软件为实验平台,对本文所提出EKF融合定位进行实验,将其与Wi-Fi指纹定位技术、PDR定位技术进行对比,通过实验结果分析,验证EKF融合定位算法的定位性能。AP位置分布如图6所示。
4.1" 模拟实验环境
AP热点的RSSI值发生用对数距离路径损耗模型来进行模拟,如式(14)所示。其中,对数距离路径损耗模型的路径衰减系数大小设置为3,并加上标准差为7 dB的正态随机数为测量随机误差。
(14)
其中,p(d)表示当用户与AP热点间隔为d米时用户接收到的信号强度大小,p(d0)表示设立的参考点与AP热点之间的距离为d0时参考点处接收到的信号强度大小,表示路径衰减系数,X表示环境噪声因子。
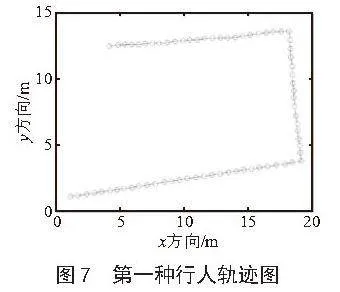
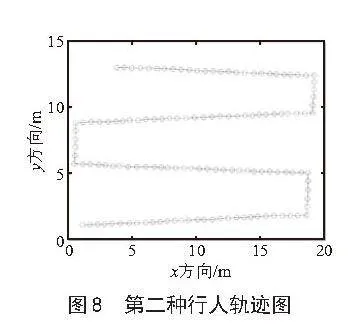
同时模拟了两条行人轨迹,如图7和如图8所示。两条行人轨迹的步长数据利用MATLAB软件的函数rand()生成,考虑实际行人的运动步长,决定用函数rand()生成在0.5~0.7 m范围内的随机步长,行人航向角数据根据模拟的行人轨迹进行设置。本次实验中,PDR定位所需的定位数据,在已有的两种行人轨迹的步长和航向角数据基础上,利用MATLAB软件的函数normrnd()添加均值为0.1 m,标准差为0.1的步长噪声,添加均值为0.1 ,标准差为0.1的航向角噪声,模拟PDR定位过程中存在的误差。
4.2" 实验结果与分析
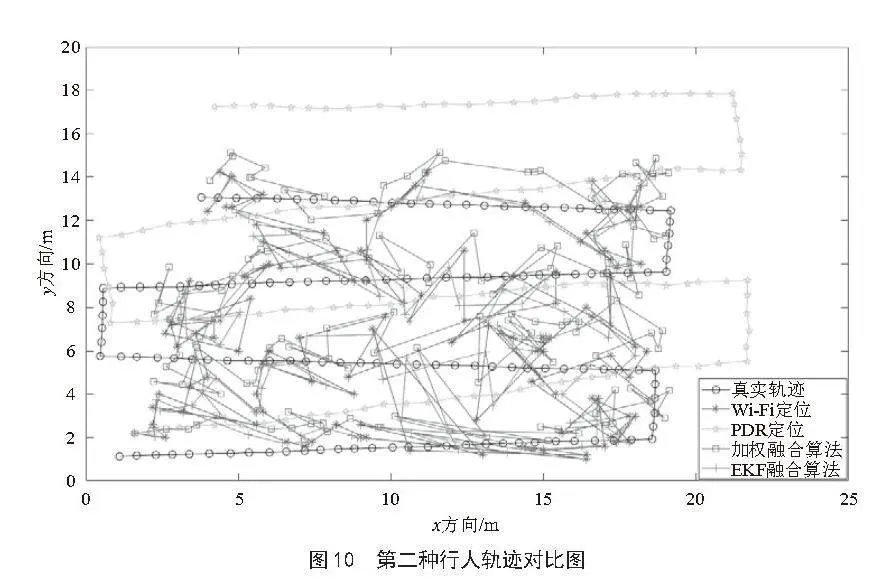
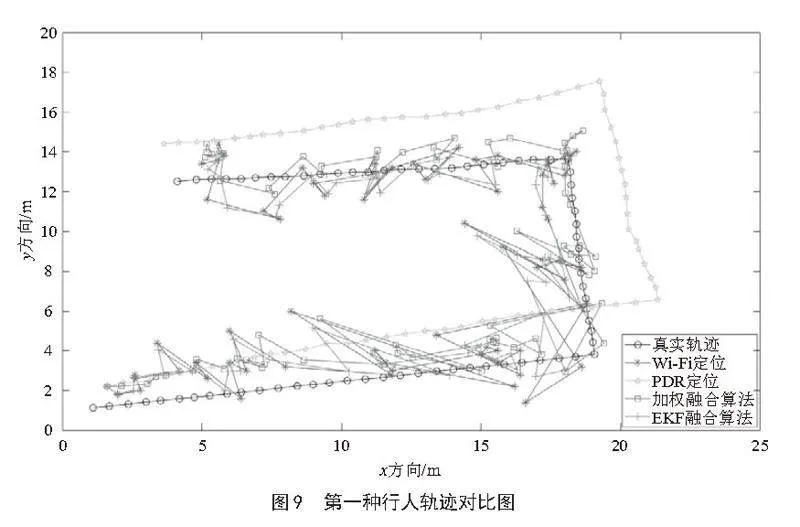
为了验证基于EKF的融合定位算法的定位性能表现,将其定位表现分别与加权融合定位算法、Wi-Fi指纹定位和PDR定位进行对比分析。本次实验使用四种定位技术进行定位,记录不同定位技术得到的定位结果,并对四种定位技术的平均定位误差进行统计分析。图9和图10为四种定位技术的两种行人轨迹的对比图。
分析如下:
1)PDR定位在行人刚开始运动时,定位精度较高,但是随着步数的增加,误差不断累积,定位轨迹逐渐飘移。
2)Wi-Fi定位在对行人的运动全程定位中,定位轨迹相较于PDR定位更贴近于真实轨迹,定位精度较为稳定,但存在个别定位跳变点,定位轨迹不平滑。
3)加权融合定位算法采取了加权策略将Wi-Fi定位结果和PDR定位结果融合起来,减少了定位轨迹的跳变点,定位轨迹更贴近于真实轨迹,但是由于权重的选择是固定的,导致了加权融合定位算法虽然在一定程度上提高了定位精度,但是其定位的稳定性较差,定位效果不可控。
4)EKF融合定位算法能够充分利用Wi-Fi定位和PDR定位的信息,在不同的定位场景下保持较好的定位精度和稳定性。其定位轨迹相对于Wi-Fi定位和加权融合定位的轨迹,更加平滑,总体定位效果也最贴近真实轨迹,EKF融合定位算法的定位整体表现要优于其他三种定位技术。
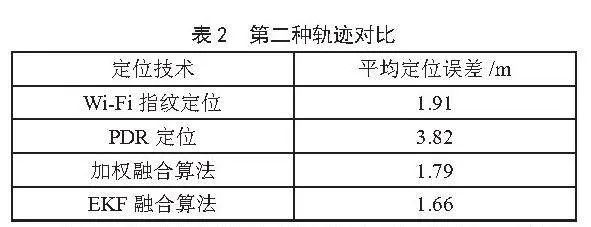
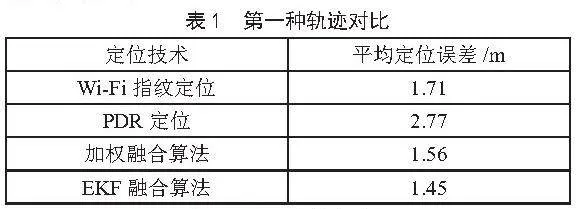
由表1和表2可知,在对两种行人轨迹的定位中,本文提出的EKF融合定位算法的平均定位误差均为最小,加权融合定位算法次之,PDR定位的平均定位误差最大,说明在整个定位过程中,本文提出的EKF融合定位算法的整体定位效果要优于其他三种定位技术。
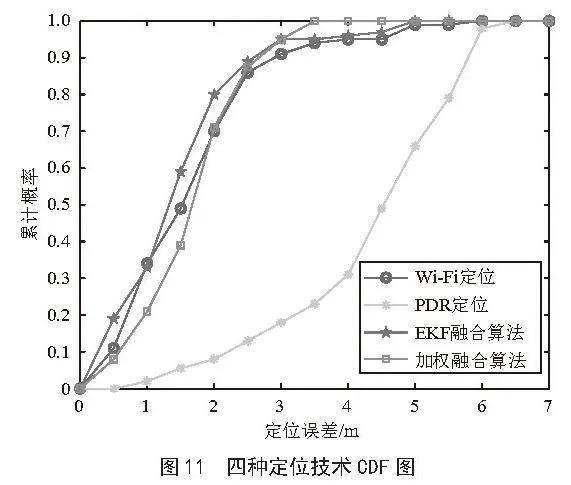
图11为四种定位技术的CDF图,从图中可以看出,EKF融合算法在误差较小的范围内CDF曲线上升快,相比之下,Wi-Fi定位算法和加权融合算法的CDF曲线上升也很快,但其累积概率略低于EKF融合算法,表明EKF融合算法的定位精度优于其他三种定位技术。
综上所述,说明了本文提出的EKF融合定位算法,相较于PDR定位技术和Wi-Fi定位技术,定位精度提升明显,有着良好的定位性能,实现了融合后的融合定位算法拥有着比单一定位技术有着更好的定位性能。相较于加权融合定位算法,虽然定位精度提升不明显,但是在长时间的定位场景下,由于加权融合定位的权重为固定值,因此随着PDR定位的定位误差增加,加权融合定位算法的定位误差也会随之受到影响,而EKF融合算法能保持较好的定位稳定性,整体的定位精度更稳定。
5" 结" 论
本文提出的基于EKF的融合定位算法,结合Wi-Fi指纹定位和PDR定位的优势,基于EKF对两种定位技术进行融合定位。通过实验表明,基于EKF的融合定位,从定位精度到定位的稳定性上,其定位表现都优于加权融合算法、Wi-Fi指纹定位和PDR定位技术。后续工作将考虑如何准确地获取行人的初始位置,减少初始位置不准确导致的定位误差。
参考文献:
[1] 闫大禹,宋伟,王旭丹,等.国内室内定位技术发展现状综述 [J].导航定位学报,2019,7(4):5-12.
[2] LIU F,LIU J,YIN Y Q,et al. Survey on WiFi-based Indoor Positioning Techniques [J].IET Communications,2020,14(9):1372-1383.
[3] KONG X T,WU C,YOU Y,et al. Hybrid Indoor Positioning Method of BLE and PDR Based on Adaptive Feedback EKF With Low BLE Deployment Density [J].IEEE Transactions on Instrumentation and Measurement,2023,72:1-12.
[4] SUN M,WANG Y,XU S J,et al. Indoor Positioning Tightly Coupled Wi-Fi FTM Ranging and PDR Based on the Extended Kalman Filter for Smartphones [J].IEEE Access,2020,8:49671-49684.
[5] 席志红,占梦奇.基于位置范围限定的WiFi-KNN室内定位算法 [J].应用科技,2020,47(4):66-70.
[6] MEHRABIAN H,RAVANMEHR R. Sensor Fusion for Indoor Positioning System Through Improved RSSI and PDR Methods [J].Future Generation Computer Systems,2023,138:254-269.
[7] 韩笑.基于Wi-Fi/PDR融合的室内定位算法研究 [D].北京:北京工业大学,2018.
[8] 郝森鑫.基于WI-FI/PDR融合的室内定位技术研究 [D].成都:西华大学,2020.
[9] CHEN J,SONG S,YU H P. An Indoor Multi-source Fusion Positioning Approach Based on PDR/MM/WiFi [J].AEU-International Journal of Electronics and Communications,2021,135:153733.
[10] LIU X,ZHOU B D,HUANG P P,et al. Kalman Filter-based Data Fusion of Wi-Fi RTT and PDR for Indoor Localization [J].IEEE Sensors Journal,2021,21(6):8479-8490.
[11] HOU B N,WANG Y CH. Positioning by Floors Based on WiFi Fingerprint [J].Measurement Science and Technology,2024,35(4):045003.
[12] CHEN G K,GUO X Y,LIU K,et al. RWKNN: A Modified WKNN Algorithm Specific for the Indoor Localization Problem [J].IEEE Sensors Journal,2022,22(7):7258-7266.
[13] 艾青,杨俊杰,蒋伟,等.改进PDR与RSSI融合的室内定位方法 [J].传感器与微系统,2023,42(12):75-78+82.
[14] FENG D Q,WANG C Q,HE C L. Kalman-Filter-based Integration of IMU and UWB for High-accuracy Indoor Positioning and Navigation [J].IEEE Internet of Things Journal,2020(4):3133-3146.
作者简介:吴志高(2002.02—),男,汉族,海南澄迈人,本科在读,研究方向:室内定位;黄康妮(2005.04—),女,汉族,江西靖安人,本科在读,研究方向:室内定位;龙克柳(1993.05—),男,土家族,湖北利川人,讲师,博士,研究方向:忆阻神经网络、室内定位。
收稿日期:2024-08-04
基金项目:大学生创新创业训练资助项目(202410407040)