马永刚
(国网江苏省电力有限公司徐州市铜山区供电分公司, 江苏 徐州 221000)
0 引言绝缘子是高压输电线路中最重要的组成部分,而绝缘子长期暴露在室外很容易发生破损或掉串等故障问题,通过智能巡检机器人进行故障检测可以减少人工巡检的成本,提升巡检工作安全性。但是传统Faster-RCNN 算法支持下的绝缘子检测方法网络模型收敛速度较慢,导致绝缘子故障定位的精度和识别准确率不高,并且机器人在高压输电线路环境下工作会受复杂的电磁环境干扰,甚至导致巡检机器人等电力设备损坏。针对以上两种巡检机器人常见的问题,提出了改进的Faster-RCNN 算法结合优化后的灰狼算法构建BP 神经网络故障诊断模型,在提升巡检机器人故障检测精确性和稳定性的同时,保障巡检机器人的电磁兼容故障诊断有效进行,保障电力系统高压输电线路巡检工作的稳定性和精确性。
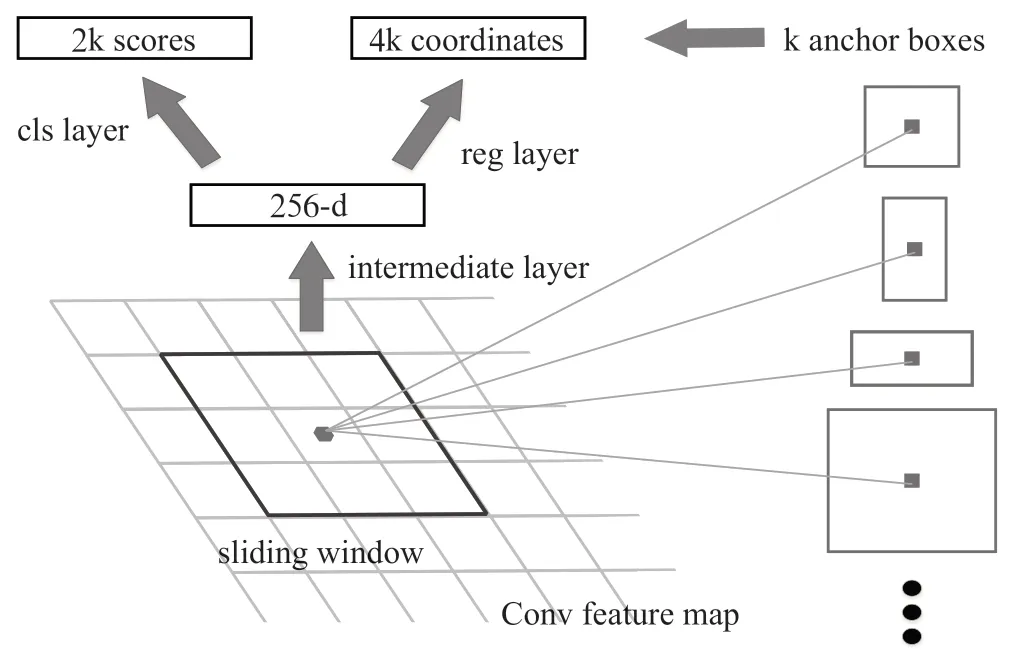
1 基于改进Faster-RCNN 算法的绝缘子检测工作原理改进的Faster-RCNN 算法对高压输电线路绝缘子巡检可实现良好的检测效果,其工作原理是在传统Faster-RCNN 算法(如图1 所示)卷积层特征提取的方法上进行优化改进,以此来增强巡检机器人的鲁棒性,提升检测精度。基于传统Faster-RCNN 算法,结合SKNet 残差神经网络算法作为故障特征提取网络,有效提升模型的收敛速度,提升巡检机器人故障诊断回归参数的准确率和效率[1]。
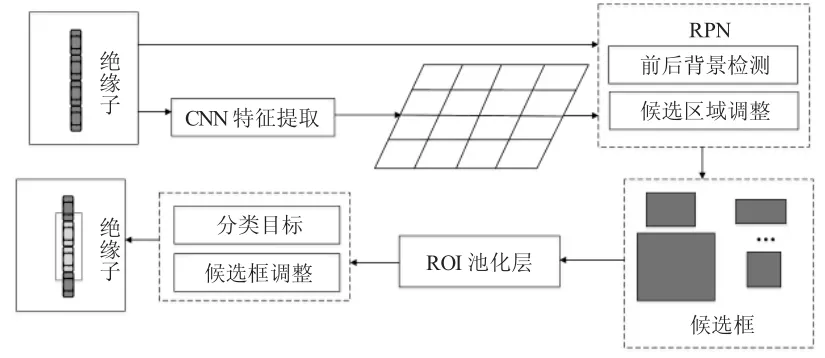
图1 传统Faster-RCNN 算法结构
1.1 基于SKNet 残差神经网络特征提取为了尽可能缓解随着网络层数增加而造成的梯度消失、爆炸及网络退化等问题,在残差神经网络模型在堆叠卷积层中增加了SKNet 残差神经网络模块(如图2 所示),以此来提取巡检过程中更多的网络特征[2]。
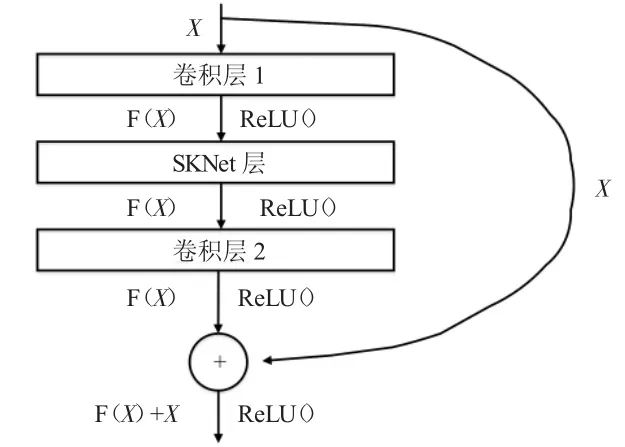
图2 SKNet 残差神经网络算法结构
基于SKNet 残差神经网络算法,为了更加高效、快速地提取绝缘子故障图像特征信息,在残差神经网络算法增加5 层卷积层数,将优化后模型残差神经结构根据图2 进行卷积层优化之后,可以得到具有通道注意力机制的ResNet 算法作为特征提取网络。
1.2 候选区域特征提取网络基于Faster-RCNN 算法候选区域特征提取网络结构主要包含了分类层和回归层,执行两个动作[3]。分类层主要判断候选区域内是否存在绝缘子特征提取,输出节点分别表示的是特征提取的前后景概率,在回归层主要负责借助特征探测器预测候选区域中故障特征提取目标区域的中心点、长和宽等4 个参数[4]。
2 基于优化后的灰狼算法-BP 神经网络电磁兼容故障检测2.1 工作原理基于优化后的灰狼算法-BP 神经网络电磁兼容故障检测主要是通过建立故障树智能分析巡检机器人在高压输电线路环境下工作,找出电磁兼容故障的原因,从故障原因的最小特征点中提取故障原因向量。随后将巡检机器人在巡检过程中采集到的故障保证数据进行归一化处理后得到故障的征兆向量。将故障征兆向量作为系统分析故障原因和构成向量测试样本训练的神经卷积网络。将测试样用于测试训练后对神经网络准确率诊断的训练,若是准确率低于设定的85%,则需要重新设定神经网络的参数之后再重新进行训练,指导准确率高于设定的准确率85%之后,则认为该诊断模型可以有效检测出巡检机器人的电磁兼容故障诊断工作[5]。具体的工作原理流程如图3 所示。
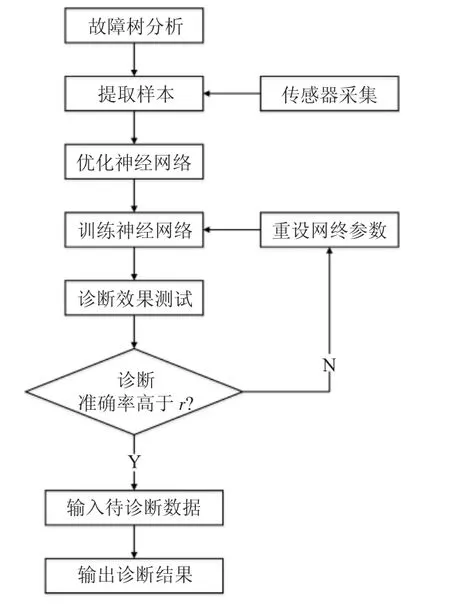
图3 故障诊断流程
2.2 基于优化后灰狼算法BP 神经网络2.2.1 优化后灰狼算法
灰狼算法是一种新的元启发算法,优化后的灰狼算法主要改进了传统回廊算法中的收敛因子和位置更新公式,更进一步优化和提升了BP 神经网络的诊断权值和阈值。灰狼算法是以狼群特征为基础提出的,按照灰狼个体在狼群中的等级关系划分为四个等级:α、β、γ、δ,其中每只灰狼个体代表的是狼群中的一个候选解,排列靠前的三组是适应度最好的灰狼个体。灰狼算法模拟狼群捕猎活动可以分为包围行为和捕猎行为[6]。
1)包围行为。假设d为灰狼个体和猎物之间的距离,则灰狼包围猎物的行为可以通过公式(1)表示:
式中:Xp(t)为猎物位置向量;X(t)为灰狼个体位置的向量;t为包围行为迭代次数;A和C分别为系统向量,将其定义为:
式中:r1和r2分别为在区间[0,1]之间的随机向量;a为收敛因子,通过函数表达为:
式中:amax为收敛因子的最大值;tmax为包围行为迭代次数的最大值。
2)捕猎行为。灰狼捕猎行为由狼群中的头狼α 及捕猎能力强的灰狼个体β 及γ 带领,逐渐接近猎物,利用惯性权重,将其位置表示为:
式中:δ 为狼群捕猎行为的惯性权重,可以通过公式(7)进行计算:
式中:狼群捕猎的惯性权重最大值δmax一般设为0.95;而最小值δmin一般设为0.42,那么在本次灰狼捕猎行为的迭代周期中,灰狼的最终位置可以表示为:
灰狼捕猎行为通过公式(5)~公式(8)进行捕猎位置、方向和猎物距离之间迭代后,将头狼α 所在位置作为故障检测适应度的最优解。通过优化后的灰狼算法可以有效提升算法的收敛速度,以此提升传统GWO 算法的选优能力。
2.2.2 基于优化后灰狼算法的BP 神经网络模型
假设BP 神经网络隐藏层到输出层的权值矩阵H作为灰狼捕猎行为发生的位置向量:
在定义的区间内随机产生灰狼个体位置,将其适应度通过BP 人工神经网络的均方误差通过公式(10)进行计算之后,通过优化后的灰狼算法迭代出最优权值和阈值[7]。
式中:m为输出的数量;为第n个训练样本中第i个期望输出值;为第n个样本中第i个实际输出的结果。
3 仿真试验和结果分析3.1 试验准备及过程为了检验文章提出的改进后的Faster-RCNN 算法对高压输电线路绝缘子故障检测的精准率以及基于优化后的灰狼算法-BP 神经网络支持下机器人电磁性能故障检测稳定性。选用基于Pytorch1.5 的深度学习框架搭建模型检测巡检机器人对绝缘子故障检测的精准性。首先选用CPLID 提供的图像数据作为样本训练集,训练集中的数据样本进行平移、旋转、饱和度调整、亮度及剪切操作之后可以得到符合试验操作的图像训练集。以传统的Faster-RCNN 算法与改进后的算法对比绝缘子故障检测的精准性,并且利用YOLO-V2 算法结合比较该算法的稳定性。
同时选用了该平台试验过程中的巡检机器人模拟工作时的电磁兼容故障样本,以此作为建立故障特征矩阵及故障原因矩阵。共选用其中30 个样本训练网络,其余15 个样本作为测试样本。以此来检测文章设计的灰狼算法-BP 神经网络模型对巡检机器人电磁兼容故障诊断的有效性。
3.2 结果分析通过与传统Faster-RCNN 算法检测绝缘子故障性能做比较,如表1 所示。

表1 绝缘子故障检测结果对比
从表1 可以看出,文章设计的改进后的Faster-RCNN 算法对于检测相同绝缘子数量下,对绝缘子故障检测正确率高于传统Faster-RCNN 算法,而遗漏率和错误率均低于传统算法,在一定程度明显提升了绝缘子故障检测的准确率。此外,结合YOLO-V2 算法进行实验对比的结果如表2 所示。
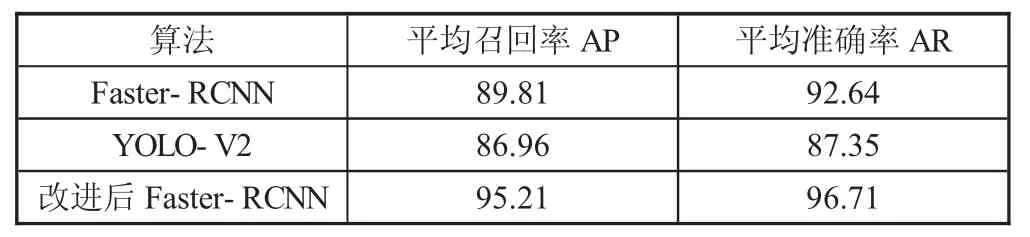
表2 不同算法稳定性试验对比
从表2 中可以看出改进后的Faster-RCNN 算法得出的AP 值和AR 值都高于其他传统算法,从结果就可以看出文章的算法具有较高的稳定性。
此外,利用该平台试验过程中的巡检机器人模拟工作时的电磁兼容故障样本,将传统灰狼算法-BP模型与优化后灰狼算法-BP 模型的学习情况进行仿真对比,其结果对比如图4 所示。
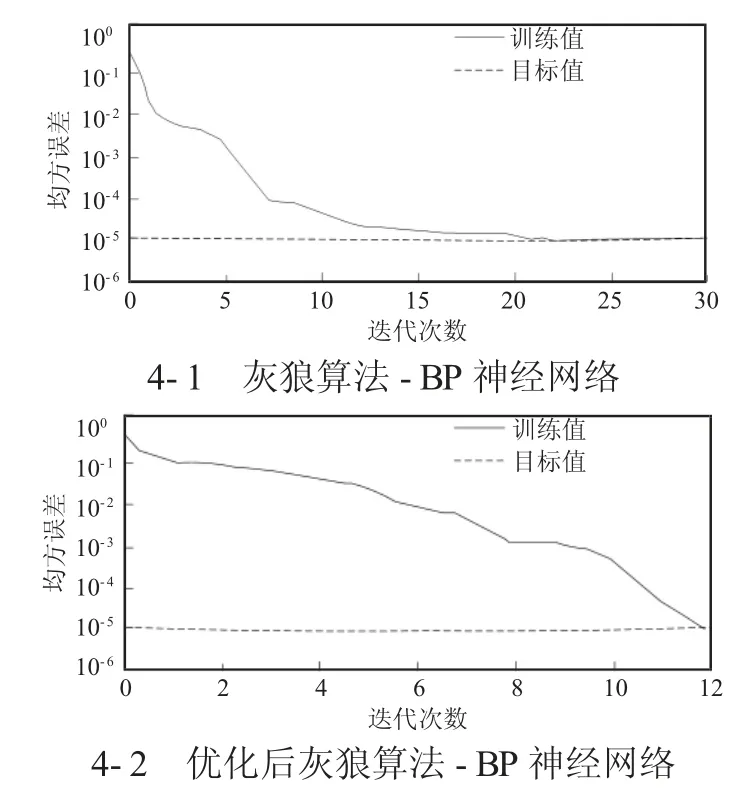
图4 神经网络训练图
从图4 中可以看出,BP 神经网络诊断结果和传统灰狼算法-BP 神经网络算法均出现了3 个及以上误差,而文章设计的优化后灰狼算法-BP 神经网络模型诊断误差仅出现一个,诊断的准确率达到了95.86%。
4 结语针对目前电力系统高压输电线路绝缘子故障巡检难度大、成本高,采用智能巡检机器人作为替代人工巡检的重要工具,从而提出了提升巡检机器人对高压输电线路绝缘子故障检测精确性和稳定性的改进后Faster-RCNN 算法,在此基础上结合优化后的灰狼算法-BP 神经网络模型提升该巡检机器人在高压输电线路电磁环境复杂的背景下对电磁兼容故障检测的稳定性。通过改进后的Faster-RCNN 算法增加特征提取网络的视野表达力,并且在候选区域提取层使用更加精确的表达绝缘子故障目标位置的精度,并且对巡检机器人电磁兼容故障诊断领域引入优化后灰狼算法-BP 神经网络模型诊断智能巡检机器人的电磁兼容性。经试验验证,文章提出的算法有效提升了智能巡检机器人对高压输电线路绝缘子故障检测的精确性,提升了智能巡检机器人在高压线路电磁环境复杂背景下,实现更快的网络收敛速度,有更高的泛化能力,有效提升智能巡检机器人故障检测的准确率和稳定性。