严健
(兰州石化职业技术大学,甘肃 兰州 730060)
0 引 言当前,全球疫情大肆蔓延,各国人民都在积极应对。接种疫苗是当前阻碍病毒传播最有效的途径,我们在积极接种疫苗并及时排查可疑人员轨迹的同时,为了最大限度地降低人民群众的感染风险,我们还需更大力度的加强公共卫生安全的防护,尤其在人员较为密集的公共场所,诸如学校、医院、大型超市及各类批发市场等,更需要加大力度进行消毒杀菌操作。若是靠工作人员对此类人员流动较大的场所进行人工消毒维护,将会形成工作效率低,防护工作任务繁重的不利局面。为了缓解人工任务的压力,近些年来越来越多的服务型机器人应运而生。根据国际标准化组织的定义,服务型机器人指的是为人类执行有用任务的机器人。而在诸多的服务机器人中,消毒机器人就是其中典型的代表。据统计,消毒机器人具有更高的消毒工作效率。对于一个标准的四十平方米的公共卫生场所,传统的人工推车或普通的医疗机械手一次消毒一般需要六小时,而消毒机器人能够在三小时之内完成消杀任务,大大减轻了工作人员的工作强度,同时避免了发生交叉感染病毒的危害。本文以人流量较大的公共场所为出发点,从实现功能和经济角度考虑,设计了一款可用于消毒杀菌的自动避障移动机器人。该款机器人所要实现的功能有以下几点,一是在移动过程中利用红外传感器能够实现自动避障;二是能够自主判别消毒水箱的水位,当水位低于最低限度会有报警功能,以便对其续加;三是可用Wi-Fi 模块实现远距离遥控,操作高效简便;四是能够适应大多数复杂的工作环境,可以覆盖整个公共场所,不留死角。
本文设计的可用于消毒杀菌的自动避障移动机器人主要分为硬件结构的设计、控制系统的设计以及其他辅助装置的配合。文章主要从上述几个方面进行阐述。
1 机器人硬件结构设计机器人硬件结构主要由行走模块、喷洒模块、控制模块和检测模块四部分组成。控制模块相当于该移动消毒机器人的“中枢神经”,对机器人整体运行起决定作用。具体如图1所示。
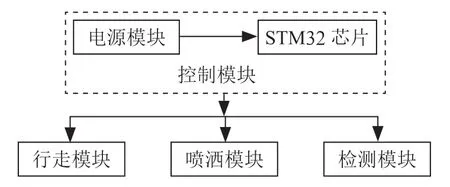
图1 机器人硬件系统框架图
控制模块中采用12 V、12 000 mAh 的大容量锂电池作为电源装置,电源装置通过给STM32 主控制板和L298N 驱动模块持续供电,从而控制驱动移动机器人的行走模块和喷洒模块的正常运行。为了使移动机器人操作更为简便有效,控制模块中加入Wi-Fi 遥控模块,使得该移动消毒机器人能够适用于更为复杂多变的、人工不便进入的工作环境。行走模块采用车体底盘式设计,底盘下方对称安装四个65 mm橡胶轮胎的麦克纳姆车轮,对四个车轮均分别使用12 V 直流驱动电机进行单独驱动,目的在于保持动力强劲,保证移动机器人的灵活运动及适应各类相对复杂的环境。底盘整体使用铝合金材料,质量轻、强度高、同时在底盘下部搭载悬挂缓震装置,以此既能增强移动机器人整体的承载能力,又能使机器人在工作中保持自身的平衡。具体如图2所示。
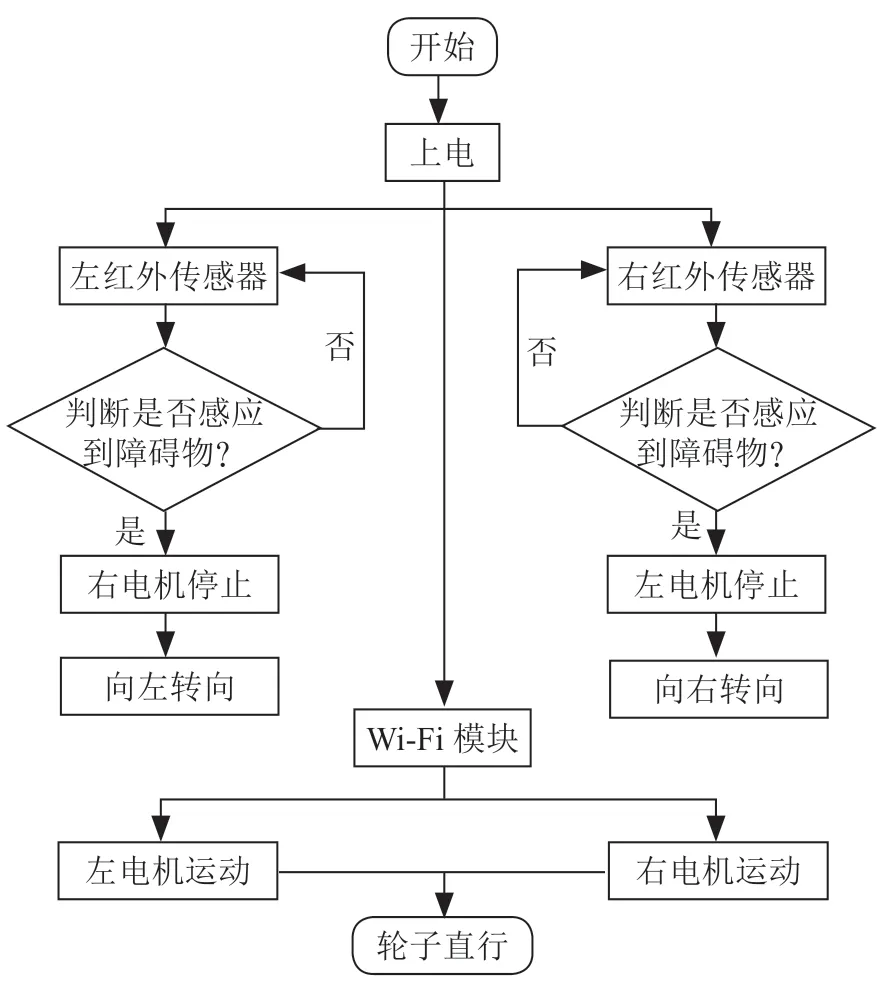
图2 移动机器人控制与行走流程
喷洒模块主要有水箱、水泵、雾化喷头、PVC软管等组成。PVC 软管将自吸水泵与雾化喷头连接起来,电源通过驱动模块L298N 持续向水泵供电,通过水泵提供动力将消毒液输出至另一端口,经雾化喷头将其雾化后送至公共场所。通过转换开关可调节喷头流量大小,根据消毒区域的特点切换出消毒的两种不同模式,即喷洒模式或雾化模式。检测模块主要涉及到水箱水位检测装置和红外避障装置。当水箱中消毒液水位下降到一定程度时,通过控制模块来借助水位传感器检测发出报警,以提醒加入消毒液,保证实现消毒工作的正常连续运行。为了行走模块在消毒工作中能以连续工作不停顿,在消毒机器人外部安装红外避障装置,检测机器人前方是否存在障碍物,以此来保持机器人连续工作。具体如图3所示。
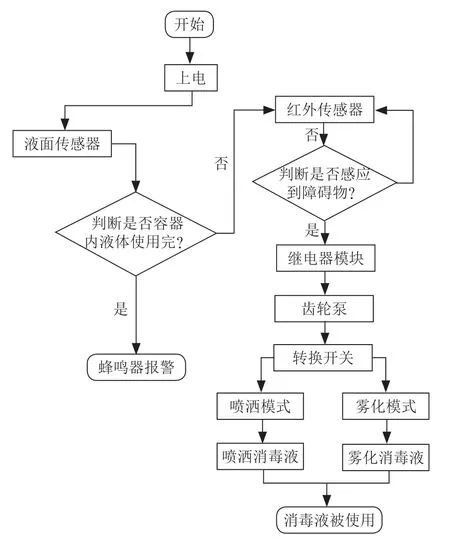
图3 移动机器人喷洒与检测流程
所设计的用于消毒杀菌的自动避障移动机器人硬件各部分具体数据如表1所示。

表1 行走模块数据参数
由于该消毒移动机器人主要应用在公共场所,因而外观设计尤为重要。外部框架设计既要突出实用性,将其设计为流线型,又要符合审美需求,外观突出简单明了。以卡通熊猫头像造型作为外观设计,既可以主观上给人以亲切感,在工作过程中大多数人不会因为该设计外观的单调而产生排斥,又巧妙地将喷雾装置嵌放在卡通熊猫的口腔内部,不会使人感觉突兀,整体设计浑然天成。利用三维软件对消毒移动机器人整体结构进行建模计算,具体硬件框架结构如图4所示。在移动机器人整体结构设计中,机器人的中枢核心—控制模块固定于机器人外壳体底部平面上,集中放置在一起便于控制管理,在整体结构下方固定行走模块的驱动电机组,在移动机器人壳体内部,距离控制模块往上80 mm 处内嵌平板,用于固定放置消毒液水箱,壳体内部设有自上向下的贯通线槽,便于布线。此设计的优点在于移动机器人壳体内部的喷洒模块与控制模块相分离,互不影响,防止水箱内消毒液体的泄露而影响电路元件的正常运行,同时有效地利用了壳体内部的有限空间,使得该消毒移动机器人结构紧凑,不同模块划分清晰,便于控制。
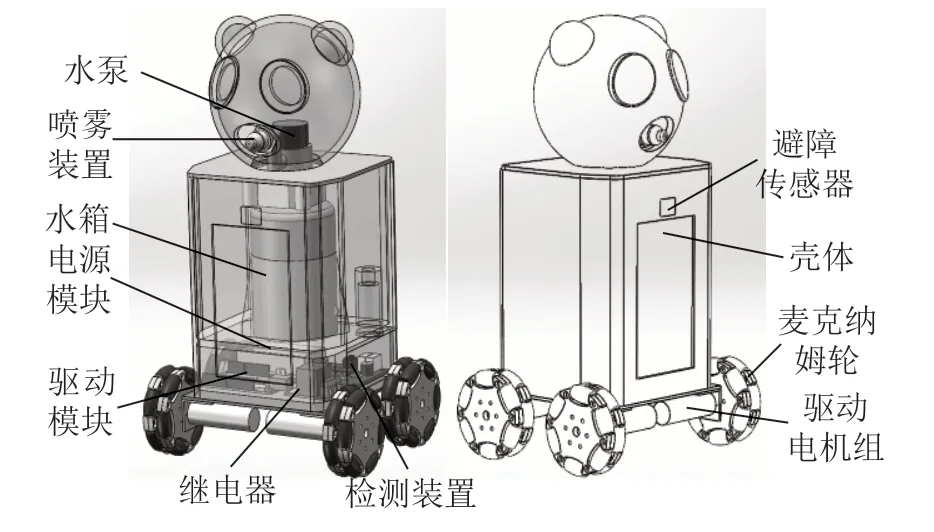
图4 消毒移动机器人结构图
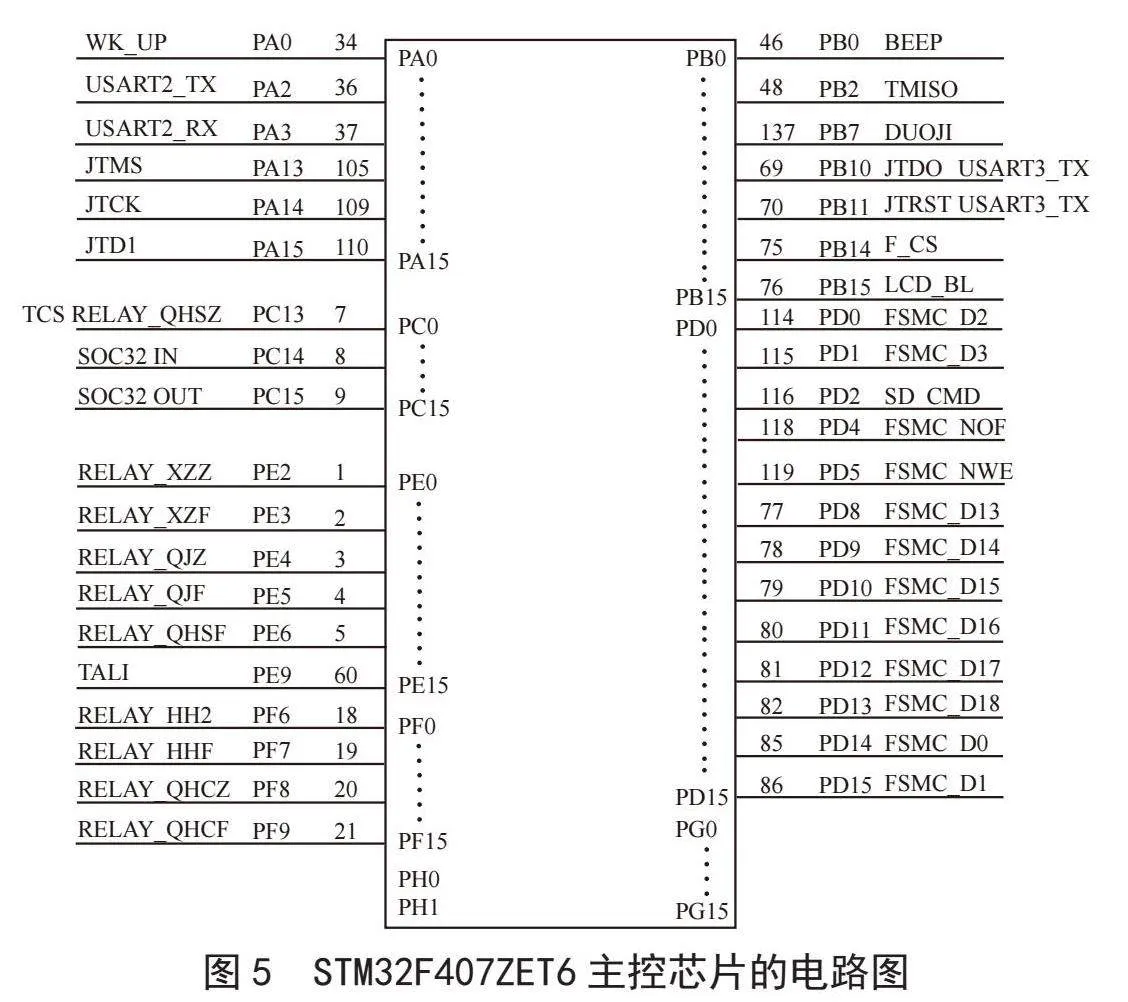
2 机器人软件控制设计机器人整体软件控制系统的设计遵循“总—分”的逻辑关系。“总”的软件控制指的是借助STM32 主控制板来实现对电路各大模块的总控,该部分为移动消毒机器人的主程序,是整个软件系统的核心;“分”的软件控制指的是各个分模块的子程序,分别用来实现每个模块的具体功能。具体如图5所示。
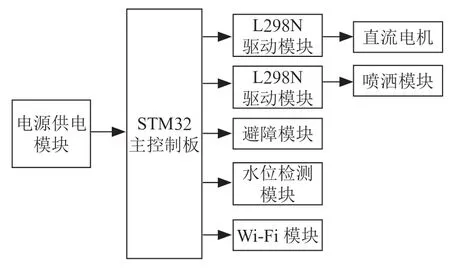
图5 机器人软件系统框架图
该消毒移动机器人采用STM32 主控制板作为主控芯片,电源供电模块给主控制芯片持续供电,STM32 主控制板作为核心,分别控制每个模块及设备。具体有通过L298N电机驱动模块来驱动直流电机,以此驱动行走模块;通过L298N 电机驱动模块来驱动喷洒模块,以此完成机器人消毒防疫任务;通过控制避障模块使得机器人在移动过程中避免碰撞障碍物,从而机器人能持续进行消毒任务;通过控制水位检测模块,当消毒液水位下降到所设限度后蜂鸣器发出报警,提醒续加消毒液;通过控制Wi-Fi 遥控模块,使得机器人能在更远距离进行作业,更加高效方便地完成消毒任务。
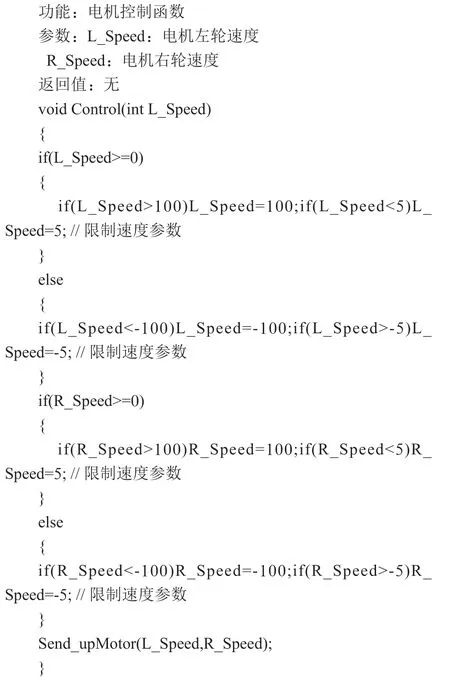
2.1 行走模块程序设计该消毒移动机器人在行进过程中采用直流电机进行驱动,每个直流电机控制一个车轮,通过调整直流电机的运动参数分别控制移动机器人的左、右车轮转速,具体驱动初始化程序为:
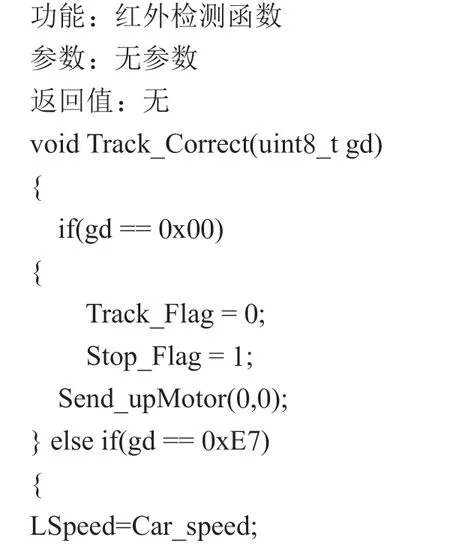
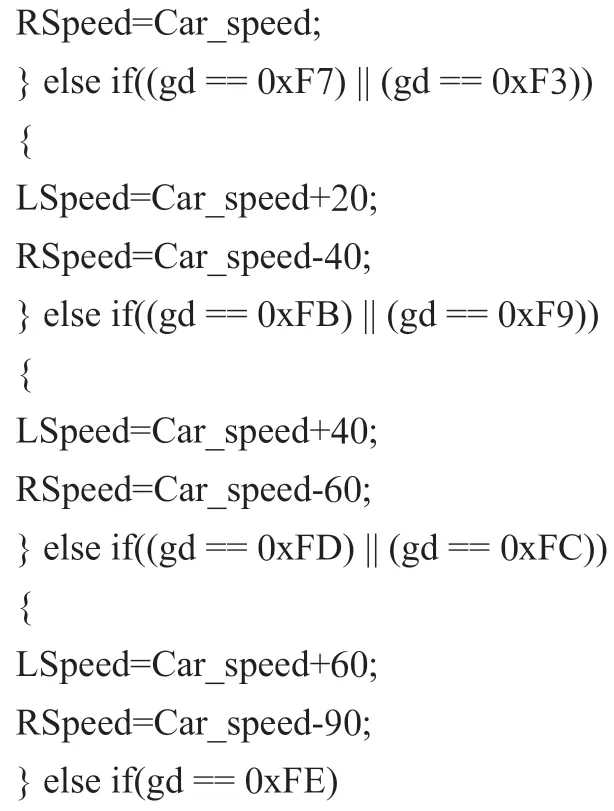
该消毒移动机器人在行进过程中采用红外避障模块,驱动红外传感器检测前方障碍物,具体部分初始化程序为:
针对全球疫情大流行的背景,设计出了一种可用于消毒的移动机器人,给出了移动机器人的软硬件设计方案,整体结构紧凑,控制系统简单,应用场合较广,可用于学校、医院等人流量大的公共场所,能使工作人员有效地降低感染病毒的风险。