


摘 要:工业机器人实训课程的教学过程中,存在虚拟仿真对象和实操对象不统一——“两张皮”现象。依托陕西工业职业技术学院1+X机器人应用编程考核平台,开发了贴近生产实际的工业机器人虚拟仿真项目,并详细阐述了每个项目的具体实训技能点。实践表明,基于实际平台的虚拟仿真训练,有助于提高学生的学习兴趣,使虚拟仿真和实际操作相互促进,互相补充,切实提高了实训教学效果,降低了实训室运行成本。
关键词:虚拟仿真;实训教学;RobotStudio;1+X
中图分类号:TP39;G434 文献标识码:A 文章编号:2096-4706(2024)15-0190-05
Research on Virtual Simulation Teaching of Industrial Robot Training Course Based on 1+X Platform
WEI Jin, LI Linjie, HE Ziqin
(Shaanxi Polytechnic Institute, Xianyang 712000, China)
Abstract: In the teaching process of industrial robot training courses, there is a phenomenon of “two skins” due to the inconsistency between virtual simulation objects and practical operation objects. Based on the 1+X robot application programming evaluation platform of Shaanxi Polytechnic Institute, a virtual simulation project of industrial robots close to the actual production is developed, and the specific training skills of each project are expounded in detail. Through practice, it has shown that virtual simulation training based on practical platforms can help improve students learning interest, promote and supplement virtual simulation and practical operation, effectively improve the efficiency of training teaching, and reduce the operating cost of the training room.
Keywords: virtual simulation; training teaching; RobotStudio; 1+X
0 引 言
党的二十大报告指出我国要大力建设现代化产业体系,坚持把发展经济的着力点放在实体经济上,推进新型工业化取得新成效,加快制造强国、质量强国建设,推动制造业实现高端化、智能化。工业机器人作为智能制造领域极具代表性的产品之一,是用以实现装备制造自动化、智能化的有效途径。随着工业机器人的应用越来越广泛,机器人教育在职业教育体系中越来越被重视,确保人才培养满足现代企业的要求。
国内的工业机器人虚拟仿真技术在职业教育教学中的使用比较单一,与实训室机器人工作站及其配套装置匹配度较低,课程内容以实际工作内容为切入点,更多的仿真技术主要应用于工业中典型的工作场景(如焊接、喷涂等),课程、教学情境设置不甚合理[1]。在新冠疫情期间,学生的线下实践教学无法保证,线上实践教学浮于表面,线上线下“两张皮”不统一,学生返校进行线下实训时,线上所学不能很好地支持线下实践,教学效果较差。考虑到实际学情、校情,借助我校1+X机器人应用编程考核平台,开发基于考核平台的虚拟仿真实训项目,研究混合式教学方法,有利于提高工业机器人的实训教学质量,满足企业对工业机器人操作岗位的能力要求,保证实训教学范例贴合我国的教育行情,从而推动职业教育的发展和人才质量的提高[2]。
1 实训项目教学规划
我院数控工程学院机电一体化专业开设的工业机器人相关实训课程主要有工业机器人仿真软件实训和工业机器人操作与编程实训,考虑到操作对象的一致性和知识的连贯性,仿真实训和实操实训对象为1+X工业机器人应用与编程考核平台及对应模型。通过不同的模型组合设计不同难度的实训项目。
结合机电专业的课程实际,工业机器人仿真软件实训课程安排为期1周的实训,共设置五个项目,星期一至星期四每天完成一个实训项目,周五安排选学项目,主要面向学有余力的学生,同时对其他学生参与的项目进行验证和总结。工业机器人操作与编程实训课程安排为1周,实训项目在原仿真基础上进行扩展。在此基础上,我院对工业机器人虚拟仿真项目进行了详细规划。
1.1 项目一:模拟涂胶工作站虚拟仿真实训项目
在工业机器人的典型应用中,无论是切割、涂胶、焊接还是搬运装配,都需要为机器人设计路径轨迹。采用现场示教的方式,不仅存在环境嘈杂、效率低下的弊端,还容易发生危险[3]。这些均可通过虚拟仿真软件的操作来实现,不但可以手动示教,还可以根据加工零件的特点自动生成路径,保证工艺精度。
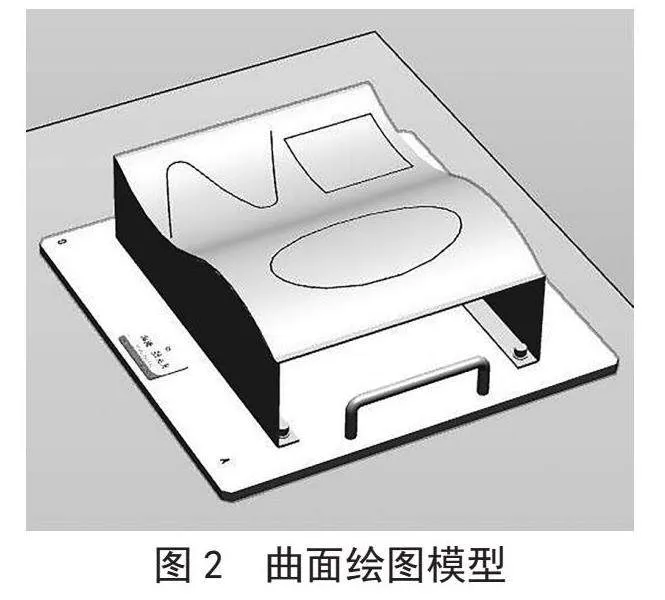
模拟涂胶工作站虚拟仿真工作站模型如图1所示。该工作台由平台基座、工业机器人以及曲面绘图模块组成,工业机器人选用IR120,曲面绘图模型如图2所示,绘图路径包含方形、椭圆形以及波浪形。学生利用RobotStudio仿真软件,通过手动设动逐点示教形成工业机器人运行路径,并使机器人沿着规划路径运动,完成整个涂胶项目。
通过这个仿真实训项目,学生可掌握Robostudio软件的基本操作流程和工作站的开发过程。具体实训流程如下:
1)工业机器人与实训台的布局。
2)曲面绘图工具的放置。
3)绘图笔工具的安装与拆除。
4)工具坐标系的建立。
5)设定机器人运行指令参数。
6)正方形、椭圆路径的创建。
7)仿真设定,模拟机器人的运行轨迹。
8)模拟涂胶仿真视图及视频的录制。
1.2 项目二:斜面写字工作站虚拟仿真实训项目
斜面写字工作站虚拟仿真实训项目为该课程的第二个项目,在模拟涂胶工作站实训中,采用示教点方法创建轨迹,这种方法不但耗时费力,而且难以保证轨迹精度[4]。工业机器人离线编程可通过三维模型曲线特征自动生成工业机器人的运行轨迹。
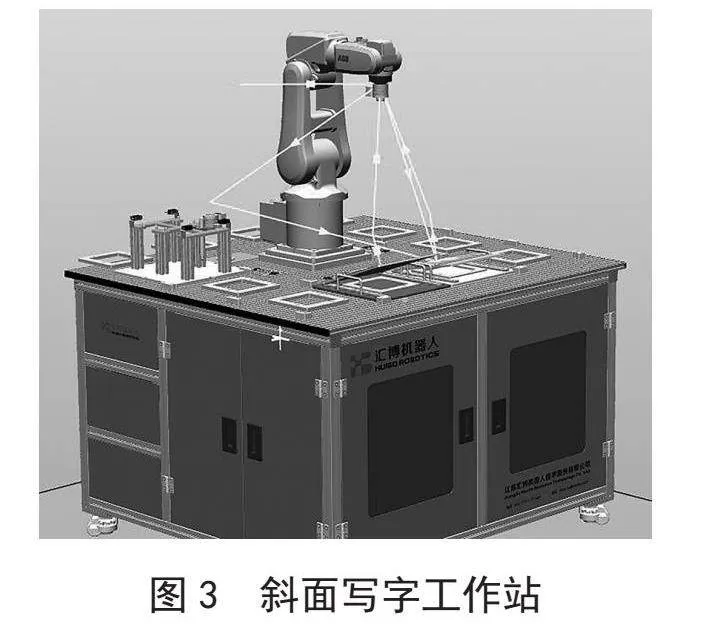
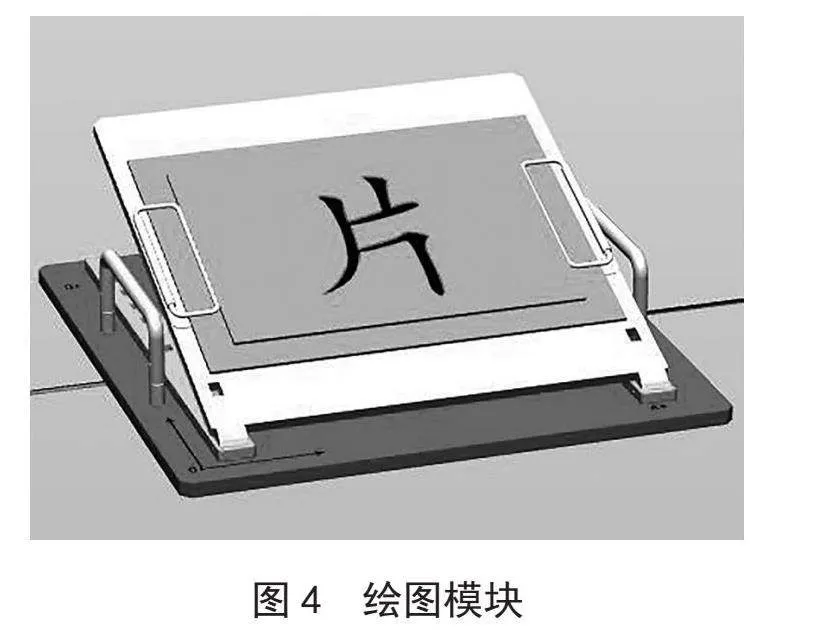
斜面写字工作站模型如图3所示,该工作台包括绘图笔工具、写字模型等,写字模型如图4所示。本项目主要通过创建斜面写字工作站,实现自动取放绘图笔工具,设置工作站、工具、工件坐标等相关参数,利用Robostudio仿真软件中的自动路径功能拾取对象“片”的轨迹,自动生成复杂轨迹路径,完成离线程序的优化和仿真测试。通过本项目的实践,重点让学生掌握在不规则曲线上通过自动路径获取工业机器人轨迹的方式实现仿真运行。
该虚拟仿真项目的知识点包含:
1)斜面写字工作站的解包和打包方法。
2)斜面写字工件坐标系的创建。
4)写字平台的倾斜设置。
4)自动路径功能的设置。
5)目标点姿态的参数配置。
6)Attacher和Detacher动作组件的使用方法。
7)写字路径的离线编程及仿真运行。
通过上述两个项目的练习,学生可充分掌握不同曲线下机器人轨迹的生成方式。
1.3 项目三:搬运工作站虚拟仿真实训项目
搬运工作站是工业机器人典型的应用场景,广泛应用于机床上下料、自动装配流水线、冲压机自动化生产线等[4]。通过安装不同的末端执行器,工业机器人可以将不同大小和形状的工件从一个位置移动到另一个位置。大大减少人类繁重、重复的体力劳动,提高工作效率。
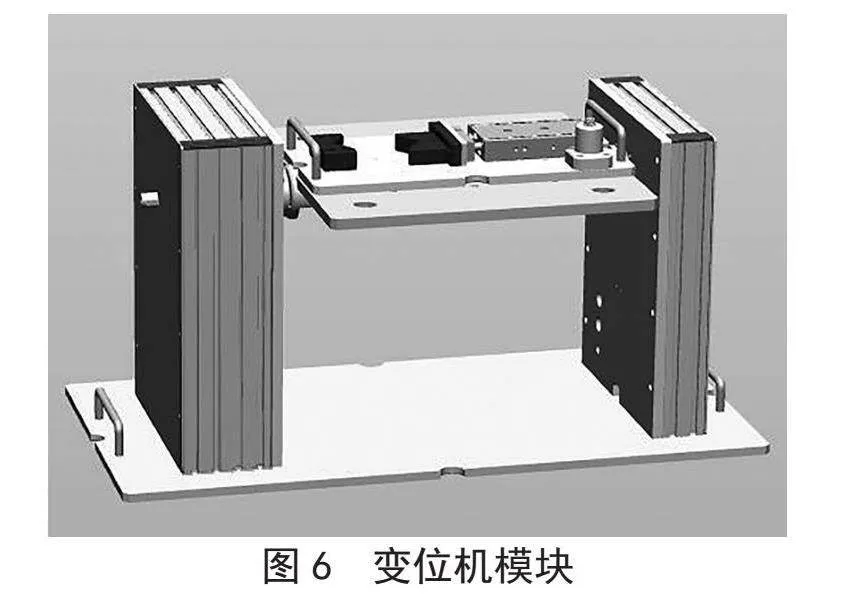
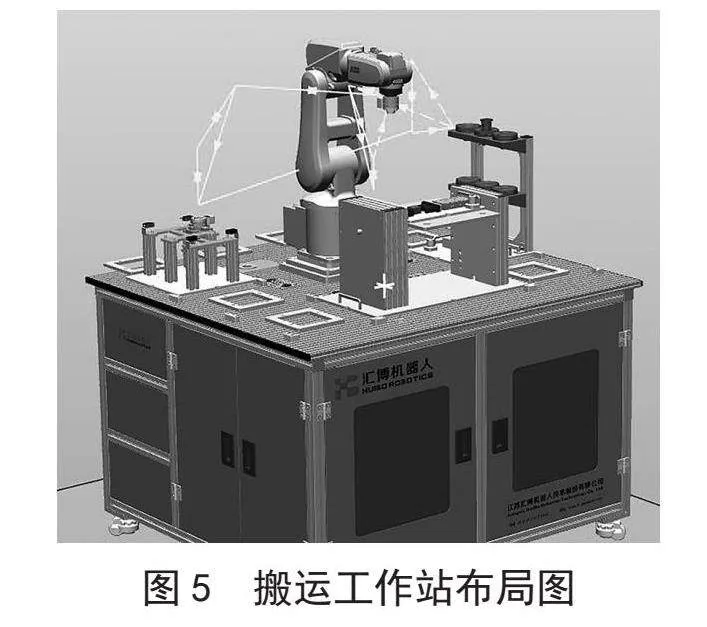
搬运工作站的布局如图5所示。搬运工作站包括平台基座、快换装置、立体仓库模块、变位机模块,选用的工业机器人型号为IR120,变位机模块如图6所示。本项目通过创建搬运工作站,利用Smart组件实现平口手爪工具的自动开合,并从立体仓库中取下电机外壳。变位机旋转20度后,机器人将电机外壳放置到变位机的装配装置上面,在此过程中进行示教编程和程序优化。本项目的教学重点是Smart姿态组件的使用方法以及机器人信号的配置方法。
该虚拟仿真项目的知识点包括:
1)工作站的布局。
2)创建手爪工具的机械模型。
3)创建旋转工具的机械模型。
4)PoseMover组件的使用方法。
5)LogicGate组件的使用方法。
6)工业机器人信号的输出及输出配置。
7)搬运应用的示教编程。
8)搬运工作的离线编辑及仿真运行。
1.4 项目四:码垛工作站虚拟仿真实训项目
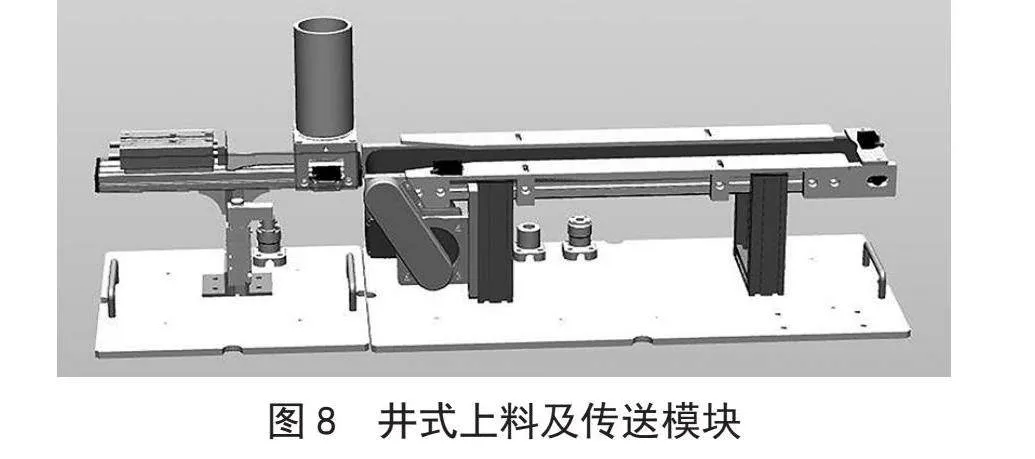
在工业应用领域,针对重复性的搬运工作,采用工业机器人码垛搬运可大大提高工作效率[5]。码垛工作站的布局如图7所示,该工作站由快换工具、井式上料及传送模块、码垛模块组成,其中井式上料及传送模块如图8所示,选用的机器人型号为IR120。工业机器人主要完成的任务是在工具快换装置上取下吸盘工具,井式上料机构将电机端盖推送至传送装置,机器人利用吸盘工具将传送带上的端盖搬运到旁边的码垛模块上。在此仿真过程中,机器人要利用吸盘工具吸附和释放盖板,井式上料机构中气缸的伸出和缩回,传动带的运转及模拟传感器的到位检测等功能的Smart组件设计,这些均是本项目的实训重点。
该虚拟仿真项目的知识点包括:
1)码垛工作任务的顺序流程。
2)创建动态吸盘工具。
3)创建井式上料机构模型。
4)Logics Latch组件的应用。
5)Line Sensor、Plane Sensor等传感器组件的应用。
6)FOR循环指令的应用。
7)MOD、DIV指令的应用。
8)Source、Queue组件的应用。
9)编写RAPID程序。
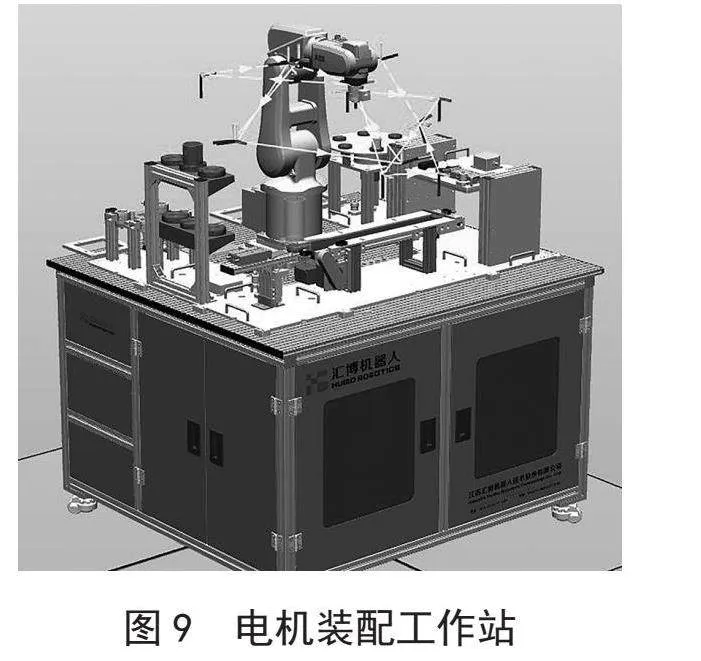
1.5 项目五:电机装配工作站虚拟仿真项目
装配作业是工业机器人的典型应用之一,其主要应用场景有家用电器、小型电机、汽车及其部件、计算机、机电产品的组合。电机装配工作站模型如图9所示,电机装配工作站包括平台基座、工业机器人、工具快换装置、电机搬运模块、变位机模块、装配模块、旋转供料模块、立体仓库模块、井式上料模块、输送带模块、平口手爪工具以及电机各部件模型等。
本项目是一个综合性应用项目,以电机装配应用为主要任务,涵盖前4个项目的技能点,全面检验学生的知识掌握程度。通过搭建电机装配工作站,创建工业机器人任务系统,构建变位机和旋转供料机械装置,利用Smart组件实现相应的功能,通过编写RAPID程序实现电机装配流程[6]。具体的装配流程如下:工业机器人首先安装快换装置上的平口手爪工具,然后将其移动到立体仓库抓取电机外壳,将电机外壳放置到变位机模块的水平装配位上,并利用定位气缸来固定电机外壳。随后变位机面向工业机器人倾斜20度,工业机器人取下旋转供料模块上的电机转子,并将其放置到电机外壳里。井式上料机构推出电机端盖,并由传送带运输至末端,工业机器人更换吸盘工具,将传送带的电机端盖装配到电机上。完成装配后,变位机翻转至水平位置,将电机成品放回立体仓库的指定位置,这样就完成了整个装配流程。
前4个虚拟仿真项目难度逐渐增加,考察的知识点也各有侧重,所选取的均是工业机器人的典型使用场景,学生按照顺序完成虚拟仿真训练。第5个项目为综合项目,难度较大,适用于学习能力强的同学,对所有同学不做强制要求。如遇疫情等不可抗力因素无法线下教学时,可在线上完成所有项目。所有项目都可以进行内容扩展,待条件允许后,继续开展线下实训,这样就能够确保线上线下学习对象的一致性[7]。
2 实训条件与效果
我校建有可容纳50人上课的工业机器人虚拟仿真实训室和工业机器人操作与编程实训室,虚拟仿真实训室的电脑均装有Robot studio软件和自动还原系统、极域网络[8]。教师可以利用极域网络开展各种教学活动,如面向学生发布广播、收发作业等,查看每个学生的开发过程和结果,对学生的各种疑问进行广播指导,达到举一反三的效果。工业机器人操作与编程实训室配有8台1+X工业机器人应用编程考核平台,如图10所示,考核平台旁配有台式电脑,每台设备安排4~5人实训。
将基于1+X工业机器人应用编程的考核平台的虚拟仿真项目应用于21级机电一体化专业的平行班级实训教学中。实践表明:基于实际设备开发的虚拟仿真实训项目有助于提高学生参加实训的兴趣和成就感,提高虚拟实训效果,进而提高工业机器人操作与编程实训的完成率[9]。通过前期的虚拟仿真实训,学生可以在虚拟环境下就关键点进行反复的演练,以求达到最佳成效,这样可大大缓解学生因对设备不熟练而造成的设备损坏问题,降低实训成本,减小设备的维护频率[10]。
3 结 论
结合我院软硬件实际和学生特点,突出以练为主的教学模式设计,重新构建基于1+X考核平台的虚拟仿真实训项目。遇到特殊情况时,可以采取线上线下混合式教学模式,使学生线上线下实训操作对象统一,线上仿真和线下操作相互促进,互相补充,促使疫情等特殊环境下的教学活动平稳安全过渡。然后将混合式教学模式应用到工业机器人实训教学的具体实践中,验证该教学模式对于提高学生学习热情、提升学生能力水平的效用。适合我国校情的课程开发方法,对于提高我国职业教育人才培养质量,促进工业机器人产业结构调整和发展具有重要意义。
参考文献:
[1] 王荣校,李全城.基于虚拟仿真的工业机器人实训混合教学研究 [J].实验室科学,2021,24(6):114-116+121.
[2] 王丹.基于1+X背景下的机器人仿真系统研究 [J].科学技术创新,2021(19):164-165.