收稿日期:2023-08-16
基金项目:南京工业大学浦江学院2022年自然科学研究类项目(njpj2022-1-20)
DOI:10.19850/j.cnki.2096-4706.2024.05.039
摘" 要:Halbach永磁同步电机吸纳永磁电机和Halbach永磁阵列的优点,被广泛地应用于机器人、新能源汽车、航空航天等领域。为了减小180W机器人关节电机的气隙磁通密度波形畸变率,提高输出转矩和效率,提出一种改进的多目标优化方法。将响应曲面法和布谷鸟算法相结合,对电机的永磁体厚度、转子厚度关键结构参数进行优化,建立Maxwell有限元模型进行对比分析。研究结果表明,此优化方法能够有效改善电机的气隙磁密畸变率和转矩,提高优化效率。
关键词:Halbach永磁阵列;布谷鸟算法;有限元分析;多目标优化
中图分类号:TP242.3" 文献标识码:A" 文章编号:2096-4706(2024)05-0179-05
Optimization Design of Robot Joint Motor Based on Maxwell
ZHANG Shuangshuang1, GE Xingmei1, LU Xinyun2, REN Siyu1
(1.Nanjing Tech University Pujiang Institute, Nanjing" 211200, China; 2.Nanjing Institute of Technology, Nanjing" 211167, China)
Abstract: The Halbach permanent magnet synchronous motor incorporates the advantages of permanent magnet motors and Halbach permanent magnet arrays, and is widely used in fields such as robot, new energy vehicles, and aerospace. In order to reduce the distortion rate of the air gap magnetic flux density waveform of the 180W robot joint motor, improve the output torque and efficiency, an improved multi-objective optimization method is proposed. By combining the response surface method and the Cuckoo Search Algorithm, the key structural parameters such as the permanent magnet thickness and rotor thickness of the motor are optimized, and a Maxwell finite element model is established for comparative analysis. The research results indicate that this optimization method can effectively improve the air gap flux density distortion rate and torque of the motor, and improve optimization efficiency.
Keywords: Halbach permanent magnet array; Cuckoo Search Algorithm; finite element analysis; multi-objective optimization
0" 引" 言
由于机器人具有可靠稳定、工作效率高、能在高危环境下代替人工进行操作[1]等优点,在工业、军事、医疗等领域具有广泛的应用前景。其中电机单元作为机器人最重要的零部件之一,对机器人是否能够平稳、精准、可靠运行至关重要。目前,为了达到关节电机高效、大转矩和低转矩脉动的设计要求,国内外机器人主要采用的驱动电机包括直流电机、永磁电机、步进电机等。其中,步进电动机存在质量较重且价格高昂的问题[2];而方波驱动的无刷直流电动机转矩脉动较大[3],不利于机械臂稳定运行;体积小、出力大并能够高效运作[4]的永磁同步电机凭借其优势,成为机器人市场的主要驱动电机。同时,具有极高气隙磁密正弦性和强大磁屏蔽效应特点的Halbach永磁体阵列[5]被应用于永磁同步电机,Halbach永磁同步电机应运而生,可以显著提高普通永磁同步电机的转矩特性。因此,Halbach永磁同步电机在机器人的发展中具有良好的应用前景。
在设计电机过程中,由于有限元计算需要大量的时间和资源,需要加入优化算法来缩减设计时长,因此在研究电机的历史长河中,对于优化算法的探索生生不息。目前,国内外研究者根据不同类型的电机、不同的优化目标,引入各式各样的优化算法来设计和优化电机,可将其主要分为单目标优化和多目标优化两种。单目标优化有利用支持向量机回归的方法、利用模拟退火的方法、采用试验设计的方法等。但是对于电机的优化设计而言,仅仅是针对单一目标的优化,只是局部优化,无法到达全局优化。对于多目标优化,文献[6]中一种改进的基于模糊田口的方法被用于直接驱动永磁同步电机的多目标优化,但是具有计算量大的问题;文献[7]中混合多目标快速收敛优化算法被用于实现永磁牵引电机的设计;文献[8]利用遗传-模拟退火混合算法对PMSM的效率、功率因数进行分析;文献[9]通过使用共形映射方法研究了一种典型永磁电机性能。以上方法虽然都可以实现多目标优化,但是存在全局搜索能力较差、计算量大大增加、运行效率低等缺点。
本文将响应曲面法和布谷鸟搜索算法相结合,以达到较快实现多目标优化的效果。响应曲面法是应用于工程和化工领域的一种常见算法,当目标函数的自变量较少时,利用这种方法可以较快地寻求出最优解。布谷鸟算法是以布谷鸟寻优产卵过程为基础的一种新型工程优化算法,具有很好的通用性和鲁棒性,并且可以和其他智能优化算法融合。因此本文结合两种方法优点,对机器人用Halbach永磁同步电机进行多目标优化。首先,阐述了180W的Halbach永磁同步电机的系统方案设计和技术指标。然后,对电机进行初始参数设计。再基于响应曲面法和布谷鸟算法,对Maxwell中建立的系统模型进行多目标优化。最后,将优化前后的结果进行对比分析,给出结论,证明优化方法的可行性。
1" 系统方案设计
1.1" 主要技术要求
电机设计前,必须明确电机的性能指标、主要的技术要求,用于进行仿真实验和优化的参数来源。本文将根据主要技术要求,包括180 W额定功率PN,48 V额定电压UN,5 A额定电流IN,3 500 r/min额定转速nN来确定电机的主要结构。
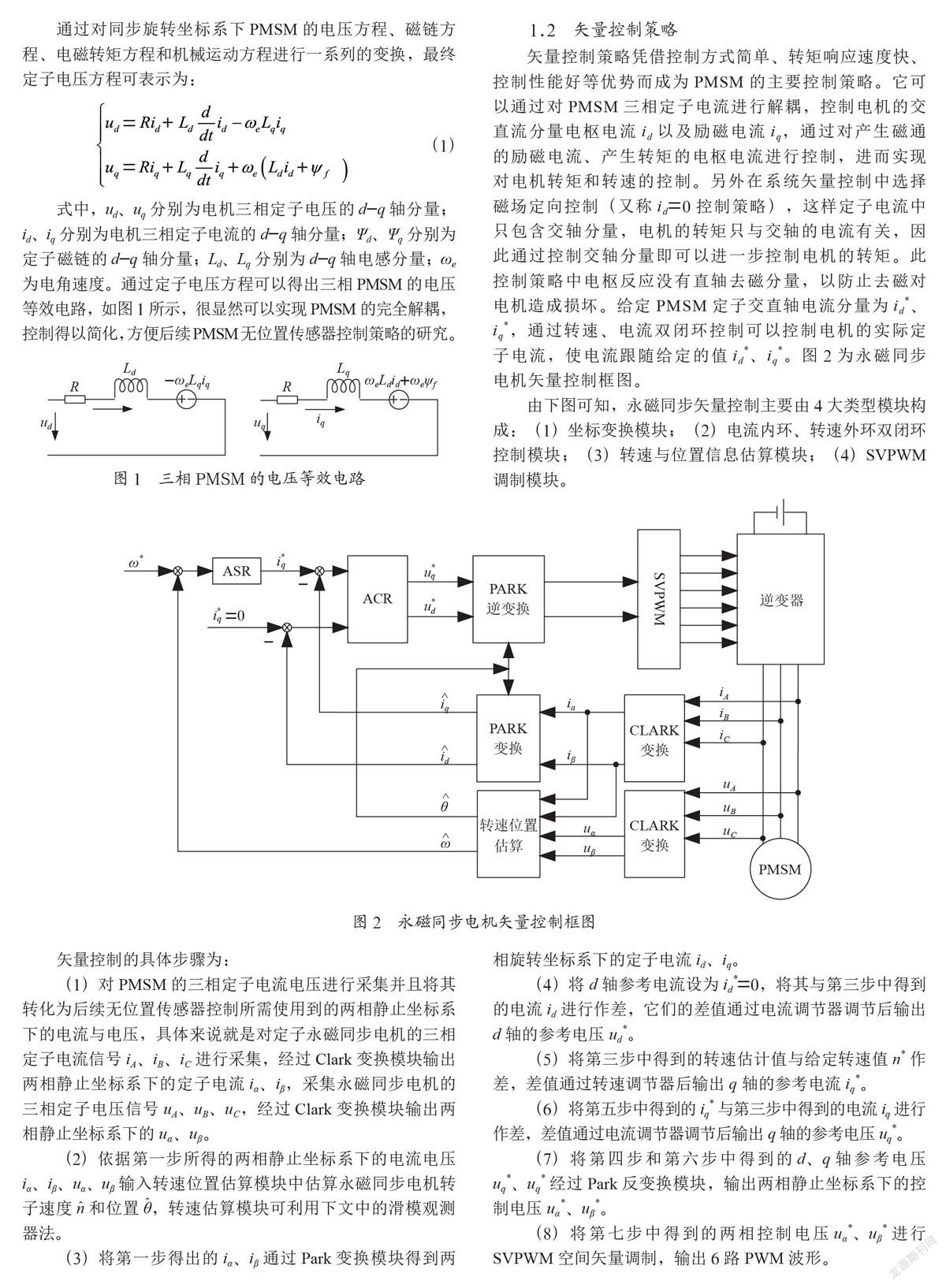
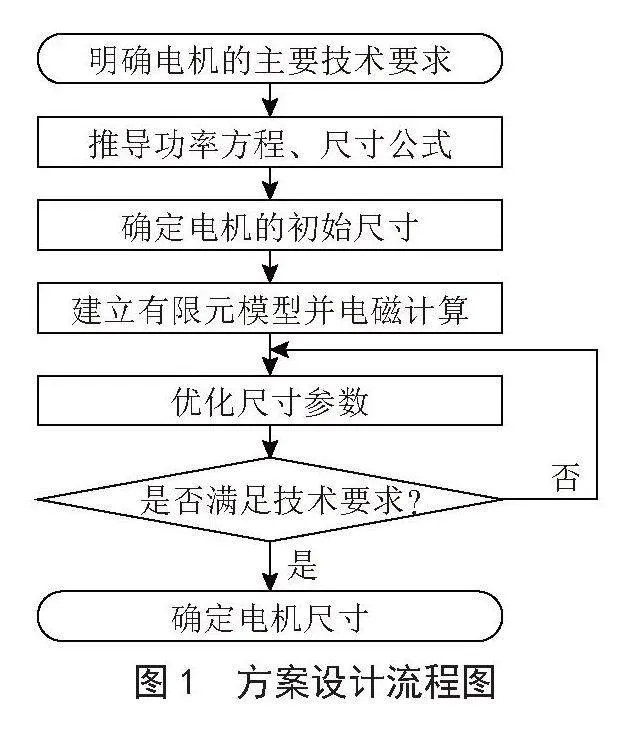
1.2" 系统设计方案
根据上述电机的主要技术要求来确定Halbach永磁同步电机的主要结构,综合权衡电磁性能指标、经济性、材料性能等要求,以选择合适的结构材料。主要的设计流程如图1所示,推导电机的功率方程和尺寸公式,进而得到电机的初试尺寸参数;再通过有限元Maxwell软件进行电磁计算,根据仿真结果判断设计的能否达到表中要求;最后,利用优化算法来对电机的尺寸参数进行优化,从而设计出符合要求的电机结构。
图1" 方案设计流程图
2" 电机的初始设计
2.1" 电机的主要参数设计
首先要确定电机的主要尺寸,其中主要尺寸对电机的建模、运行特性分析及生产加工有着非常重要的作用。所以本文依据主要技术要求进行参数设计。
当电机稳态运行时,其转速n与定子旋转磁场的转速,都取决于电源频率f和电机极对数p,即:
(1)
一般将电机的极弧系数Cs定义为每极永磁体弧长与一个定子极距的比值,也可定义为气隙平均磁密和最大磁密的比值[10]。和普通的永磁电机不同的是,本文电机结构为了满足Halbach单侧聚磁的要求,永磁阵列几乎覆盖了整个定子极距,所以依据一般标准来定义含有Halbach的电机极弧系数是没有意义的。所以,本文将一极Halbach永磁体阵列在一个定子极距内所占的范围比例定义为该电机的极弧系数:
(2)
式中,bi为Halbach阵列永磁体所跨弧长,τ1为定子极距。
空载反电动势Em为电机的关键参数之一,本文中是由电机中Halbach永磁阵列产生的空载气隙基波磁通在电枢绕组中感应产生,定子绕组每相空载感应电势幅值为:
(3)
式中,Nph为电机定子相绕组匝数;ωr为转子角速度,单位为rad;Фm为永磁磁通的幅值。
根据上述步骤推导出电机的输出方程,即可得到尺寸方程式(4):
(4)
式中,P2为电机的输出功率,q为定子槽数,kd为绕组磁密波形系数,kF为空载时气隙磁场中基波幅值和磁密最大值的比值,kio为电机的裂比,Ac为电负荷。
2.2" Halbach永磁体参数设计
Halbach永磁阵列能使得气隙磁密的幅值大幅提升并有效提高磁密正弦性,故本文的永磁体选用Halbach永磁阵列结构。在常见的分段式Halbach永磁阵列中,根据功能可将其分为主、辅两类。其中,将用于建立气隙磁场的阵列块定义为主极,并且对其进行径向充磁;而用于改善波形正弦度的定义为辅极Halbach永磁阵列块[11]。另外,由于Halbach永磁同步电机的应用大多数是该电机的气隙磁密有所要求,需要具备高可靠性和大的功率密度,因此所选永磁材料要有较大的矫顽力Hc和磁能积(BH)max。综合分析上述各方面因素后,本文设计的电机选用剩磁密度Br和矫顽力Hc数值较高的钕铁硼永磁材料。
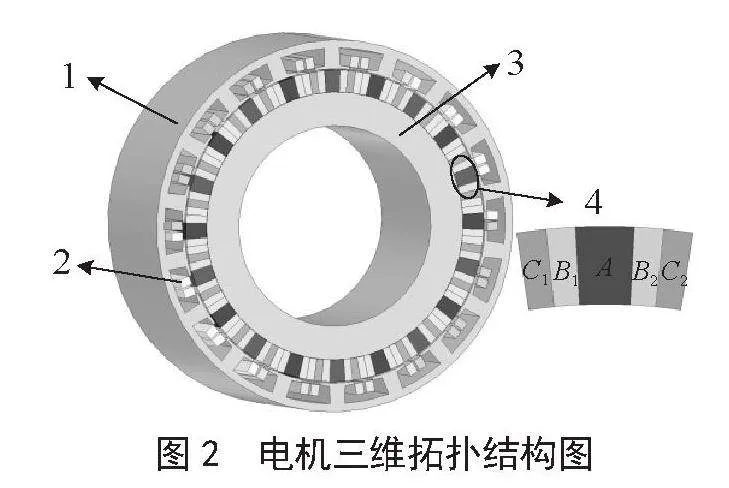
本设计中1极永磁体,由5块Halbach阵列组成,分别记为A、B1、B2、C1和C2。如图2所示,永磁体块A~C2的充磁角度分别记为α、β1、β2、γ1和γ2,其中p为电机的极对数。
图2" 电机三维拓扑结构图
图2显示了三相Halbach永磁同步电机的拓扑结构,该拓扑由定子铁芯1和转子铁芯3,电枢绕组2和20组Halbach阵列4组成。定子和转子铁芯的材料是硅钢片,电枢绕组由铜线圈组成。
2.3" 电机主要尺寸参数
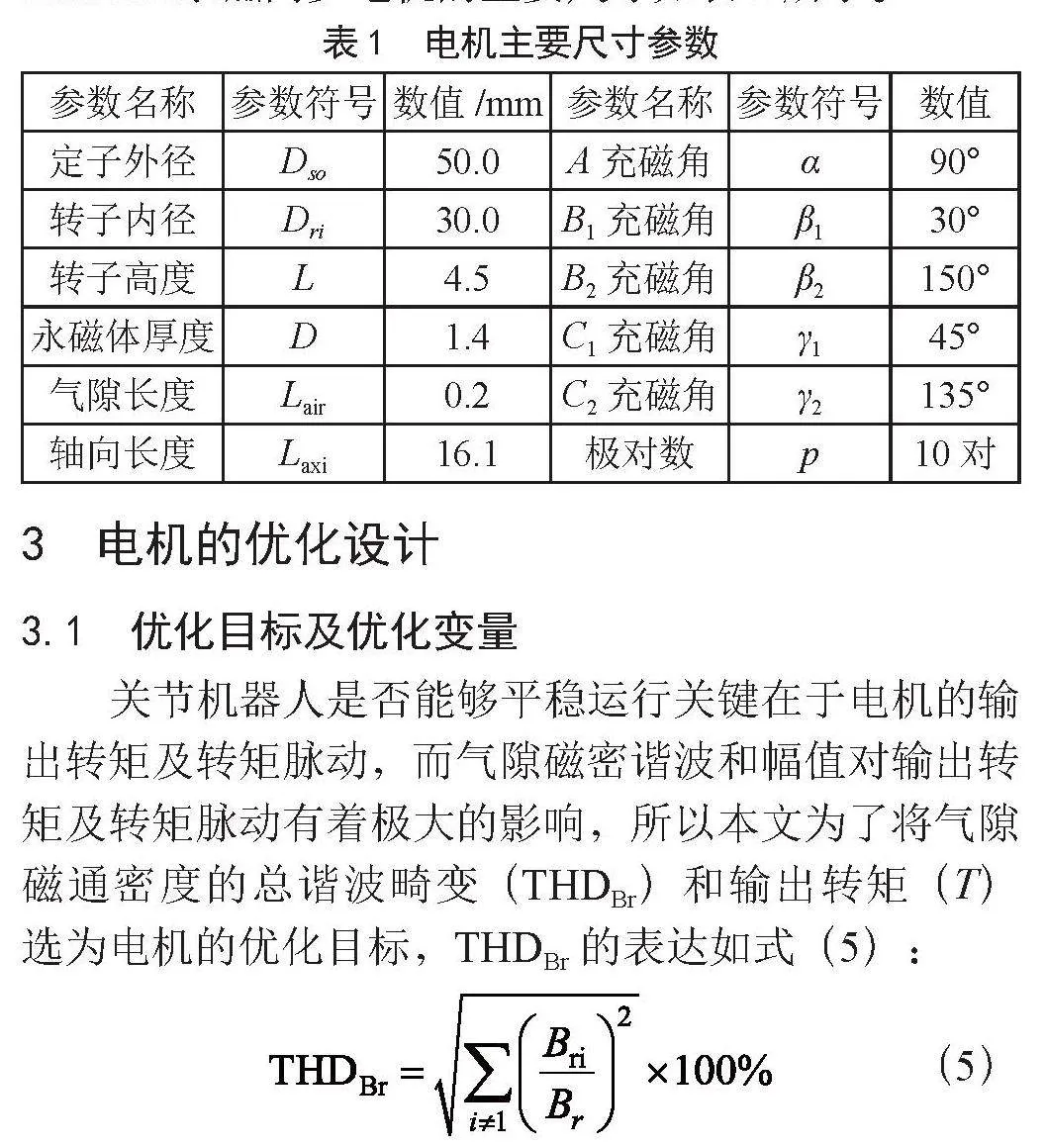
根据以上的公式推导和设计分析,可得到Halbach永磁同步电机的主要尺寸如表1所示。
表1" 电机主要尺寸参数
参数名称 参数符号 数值/mm 参数名称 参数符号 数值
定子外径 Dso 50.0 A充磁角 α 90°
转子内径 Dri 30.0 B1充磁角 β1 30°
转子高度 L 4.5 B2充磁角 β2 150°
永磁体厚度 D 1.4 C1充磁角 γ1 45°
气隙长度 Lair 0.2 C2充磁角 γ2 135°
轴向长度 Laxi 16.1 极对数 p 10对
3" 电机的优化设计
3.1" 优化目标及优化变量
关节机器人是否能够平稳运行关键在于电机的输出转矩及转矩脉动,而气隙磁密谐波和幅值对输出转矩及转矩脉动有着极大的影响,所以本文为了将气隙磁通密度的总谐波畸变(THDBr)和输出转矩(T)选为电机的优化目标,THDBr的表达如式(5):
(5)
式中,Bri为气隙通量密度的第i次谐波幅度,Br为气隙通量密度的基波幅值。
电机的励磁源主要定子绕组和永磁体,本文在保持样机的外尺寸不变的条件下,根据实际制造条件的限制,将永磁体厚度、转子厚度这两个参数作为优化变量,进行电机的气隙磁密谐波畸变率、输出转矩的优化。
3.2" 响应曲面模型的求取
基于响应曲面理论,建立自变量与输出量的响应曲面模型。本文选用D、L为自变量,T、THDBr为响应值。通过改变自变量,来寻求最佳响应曲面,可表示为:
(6)
式中,y为响应值,x为自变量,k为自变量的个数。
利用最小二乘法,拟合近似函数,得到精确的响应曲面模型来代替自变量与响应值之间的真实函数关系。另外,采用响应曲面中心复合设计central composite design(CCD)的方法,选取合适的自变量范围。利用有限元软件Maxwell建立样本点的二维模型,计算每个实验点的输出转矩T,通过对气隙磁通密度波形图的傅里叶分解,获得气隙磁密的基波幅值、各次谐波幅值以及THDBr。
对求得的模型进行分析,其中拟合数据R2表示响应曲面与实际值之间的差异程度,两模型R2分别为0.929和0.920,均大于0.9,说明拟合度较好。Adjusted-R2反映添加的变量是否具备统计学意义,该值越大,表明模型拟合的精确度越高。表中两模型的该值分别为0.869和0.852,均大于0.8,说明响应值和自变量之间线性关系显著,模型能够较好地反应数据规律。对模型进行方差分析时,P值为拟合出的模型在进行数据预测的准确程度,两模型P值均小于0.002,实验误差较小。综合分析,整体模型有效。
3.3" 布谷鸟算法寻优
剑桥大学的杨教授在十多年前提出了一种仿生类算法,即布谷鸟搜索算法,该算法来源于布谷鸟独特的巢寄生行为以及大多鸟类存在的一种飞行轨迹[12]。为了更好地描述,故建立以下规则:
1)布谷鸟每次产且仅产出一个蛋,将其随机的选择一个鸟巢放置。
2)仅保留孵化出最优布谷鸟蛋的鸟巢到下一代。
3)宿主的数量是固定的,被宿主发现的概率假设为P,如果被宿主发现,则视为该鸟巢寄生失败。
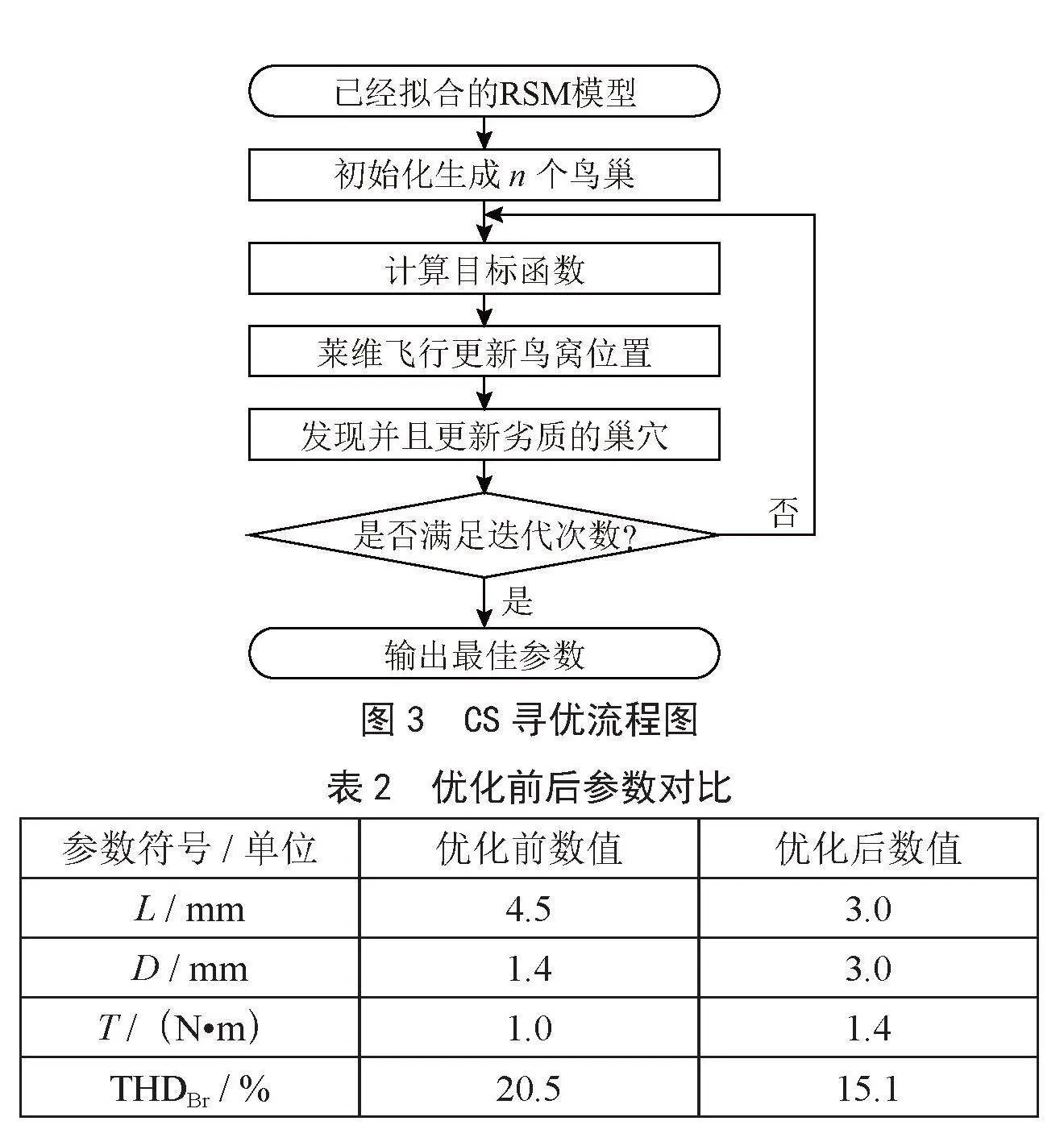
本文利用JMP软件中的曲面响应法拟合尺寸变量和优化目标之间的关系,采用CS算法对该拟合的模型进行寻优,流程如图3所示。布谷鸟算法的相关参数设置,由于输出转矩T和气隙磁密总谐波畸变THDBr对Halbach永磁同步电机的性能影响同等重要,故在Pareto解集中选择最佳解决方案时,赋予二者的权重各为1/2,优化后的结果如表2所示。
图3" CS寻优流程图
表2" 优化前后参数对比
参数符号/单位 优化前数值 优化后数值
L / mm 4.5 3.0
D / mm 1.4 3.0
T /(N·m) 1.0 1.4
THDBr / % 20.5 15.1
4" 优化前后对比分析
4.1" 气隙磁场
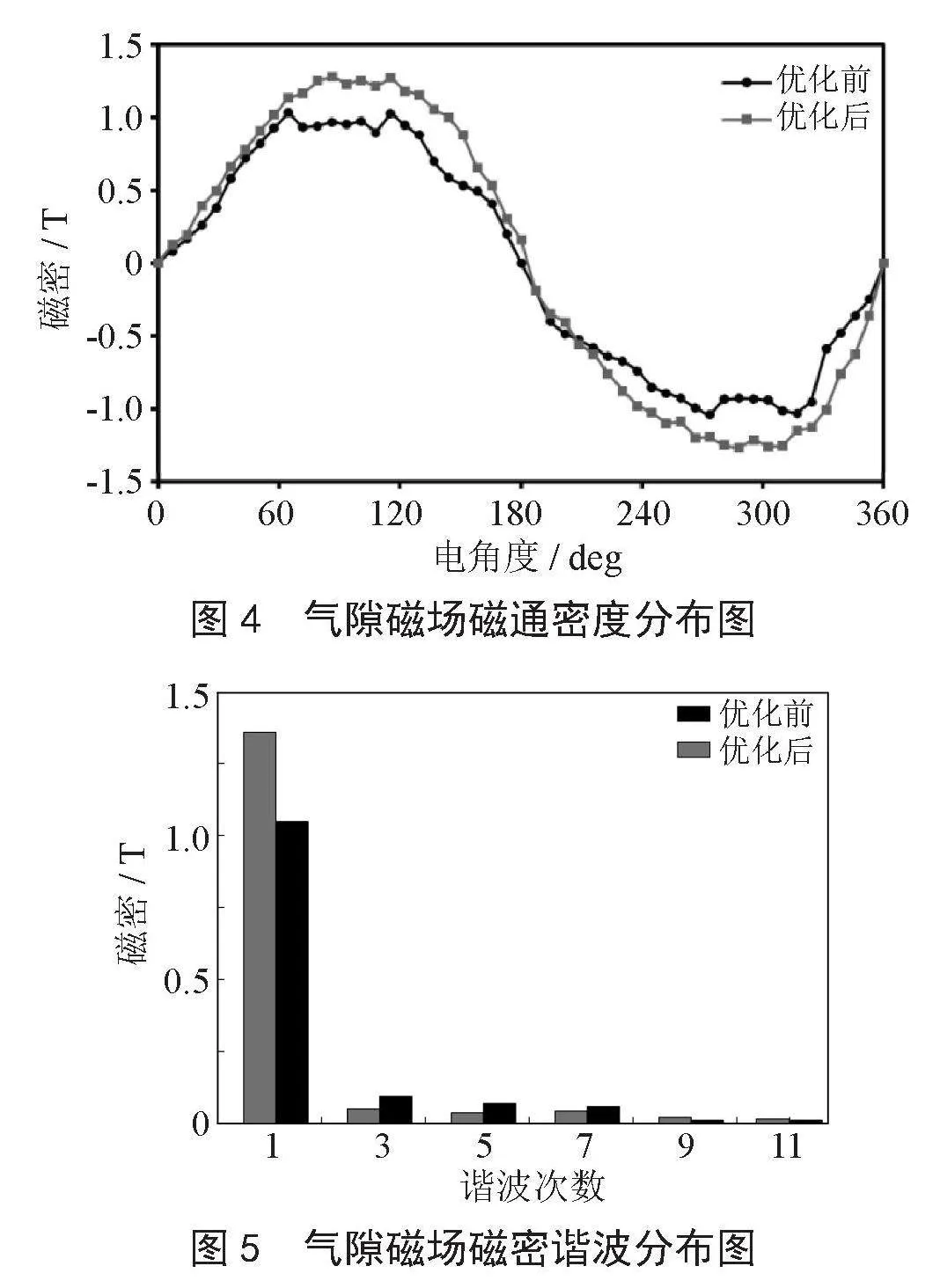
图4和图5分别是优化前电机(HPMSM1)与优化后电机(HPMSM2)的气隙磁场磁通密度分布图及其谐波分布图。从图中可以看出,气隙磁通密度基波幅值增大,谐波畸变率减小了5.4%,有利于减小转矩脉动和损耗,提高电机性能。
图4" 气隙磁场磁通密度分布图
图5" 气隙磁场磁密谐波分布图
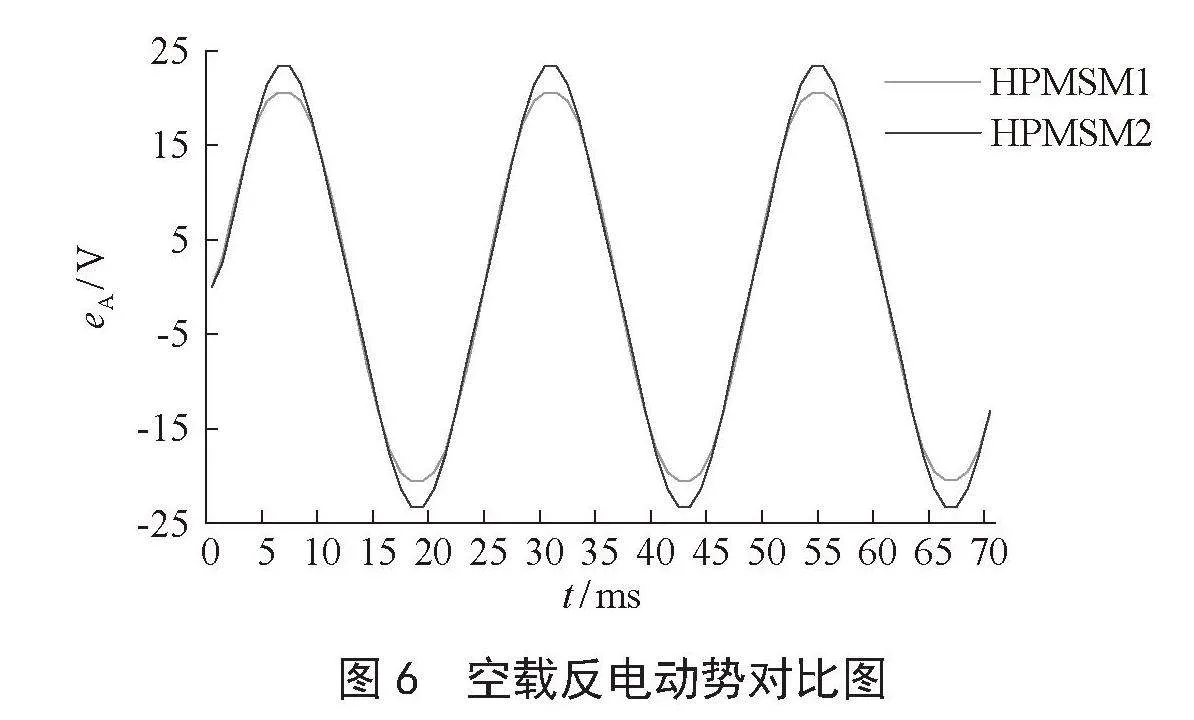
4.2" 空载反电动势
图6是优化前后电机的空载反电动势对比图,二者畸变率均低于5%。在图中,优化前的反电动势有效值14 V,优化后电机的反电动势有效值为16.5 V,比之前增大了17.9%。优化后的反电动势幅值变大,正弦度较好,从而提高电机的转矩性能。
图6" 空载反电动势对比图
4.3" 转矩特性
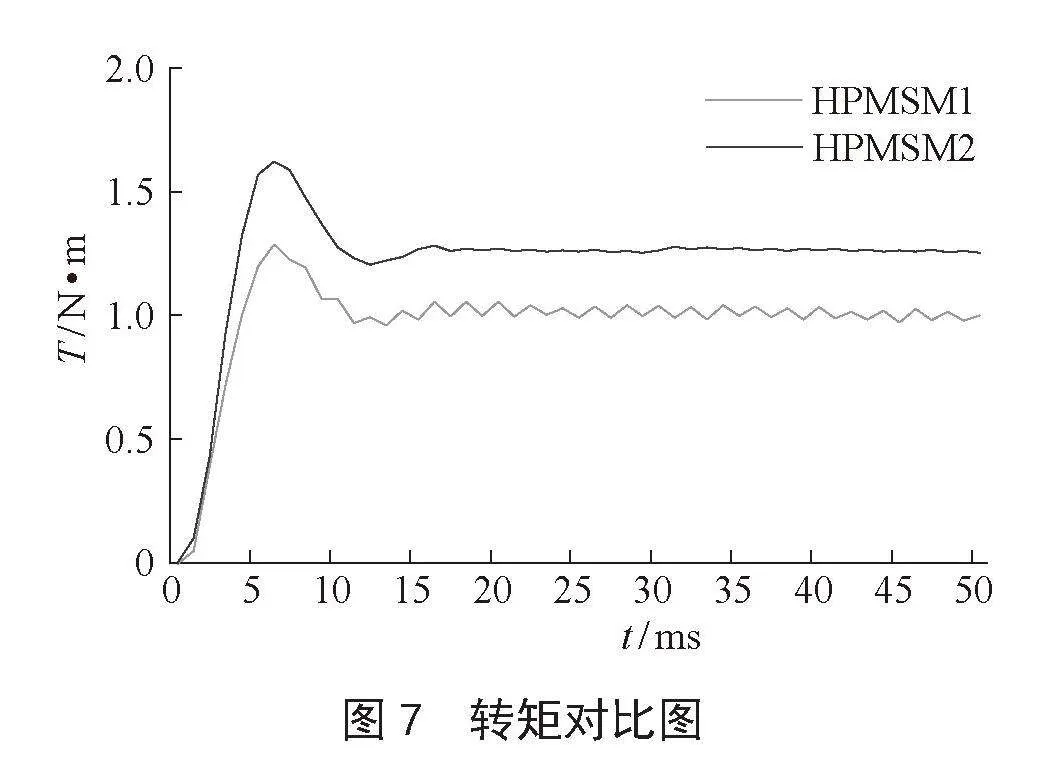
由图7可见,优化后电机输出转矩为1.4 N·m,比优化前提高了40%。并且优化后的转矩脉动明显比优化前小。可以说明优化后的电机转矩特性得到了明显的提高。
图7" 转矩对比图
5" 结" 论
本文将响应曲面法与布谷鸟算法相结合,优化了机器人用Halbach永磁同步电机转子和永磁体的厚度,以增加转矩,降低气隙磁通密度的THD。通过有限元方法验证了多目标优化的方法。该方法不仅仅弥补了响应曲面法的不足,还降低了计算量,减少了优化时间。仿真结果表明,优化后电机的气隙磁场磁通密度波形更趋于正弦波,转矩提高并且脉动得到了改善。
参考文献:
[1] 初振奎.机器人用高过载永磁电机设计 [D].沈阳:沈阳工业大学,2019.
[2] 刘涛.消防机器人用中空两相混合式步进电动机设计 [J].微特电机,2019,47(11):12-14.
[3] 白颖,蒋庆斌,莫莉萍,等.上肢康复机器人机构设计与分析 [J].海南大学学报:自然科学版,2019,37(4):351-358.
[4] 陈硕.交流伺服表面式永磁电机设计及铁耗计算研究 [D].株洲:湖南工业大学,2020.
[5] HALBACH K. Design of permanent multipole magnets with oriented rare earth cobalt material [J].Nuclear Instruments and Methods,1980,169(1):1-10.
[6] GUO Y Q,SI J K,GAO C X,FENG H C,et al. Improved Fuzzy-Based Taguchi Method for Multi-Objective Optimization of Direct-Drive Permanent Magnet Synchronous Motors [J].IEEE Transactions on Magnetics,2019,55(6):1-4.
[7] KRASOPOULOS C T,ARMOUTI I P,KLADAS A G. Hybrid multi-objective optimization algorithm for PM motor design [C]//2016 IEEE Conference on Electromagnetic Field Computation(CEFC).Miami:IEEE,2016:1-1.
[8] CAO X J,LI G L,YE Q B. Multi-objective optimization of permanent magnet synchronous motor based on elite retention hybrid simulated annealing algorithm [C]//2017 12th IEEE Conference on Industrial Electronics and Applications(ICIEA).Siem Reap:IEEE,2017:535-540.
[9] REZAEEALAM B,REZAEE-ALAM F. A new optimal design of surface mounted permanent magnet synchronous motors with integral slot per pole [J].COMPEL-The international journal for computation and mathematics in electrical and electronic engineering,2018,37(1):136-152.
[10] 邱瑞林.永磁同步电机电磁设计及优化研究 [D].青岛:青岛大学,2020.
[11] 李凡昌.不等厚磁极Halbach永磁电机气隙磁场解析与优化设计研究 [D].广州:华南理工大学,2018.
[12] 李丽娟.基于改进多目标布谷鸟算法的污水处理过程优化控制研究 [D].兰州:兰州理工大学,2019.
作者简介:张双双(1995.10—),女,汉族,江苏盐城人,助教,硕士,研究方向:自动控制、电磁设计;葛星梅(1994.02—),女,汉族,江苏泰州人,助教,硕士,研究方向:自动控制、无线通信;陆欣云(1981.08—),男,汉族,江苏南京人,讲师,硕士学历,研究方向:计算机控制、网络通信;任思宇(2002.02—),女,汉族,江苏徐州人,讲师,本科在读,研究方向:自动控制。