

摘 要:针对全球导航卫星系统在边坡环境下出现的多路径误差问题,提出了一种基于CEEMDAN分解联合小波滤波后重构的多路径误差处理算法,通过CEEMDAN分解和小波滤波处理原始信号,有效减弱多路径误差对定位精度的影响。分别采取数值仿真和实测数据来验证算法的有效性,实验结果表明,对GNSS边坡实测数据处理后,对第二天观测值进行多路径剔除,剔除后的坐标精度明显提高,特别是在E方向的精度改善明显,验证了该算法在GNSS边坡环境下的有效性,能够有效提高定位精度。
关键词:GNSS;多路径误差;边坡监测;CEEMDAN;小波
中图分类号:TN967.1;P288.4 文献标识码:A 文章编号:2096-4706(2024)15-0060-06
Research on Multipath Error Processing of GNSS Slope Monitoring Based on CEEMDAN Combined Wavelet
GUAN Zhiyu1, ZHONG Qiuwen2, WEI Wanqiu1, LAN Yiling1, JIN Xiangren1
(1.Guangxi Modern Polytechnic College, Hechi 547000, China;
2.Guangxi Tianxiang Engineering Management Co., Ltd., Hechi 547000, China)
Abstract: In addressing the problems of multipath errors within the Global Navigation Satellite System (GNSS) under slope conditions, we propose a reconstructed multipath error processing algorithm based on the integration of Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN) and wavelet filtering. By decomposing the original signal using CEEMDAN and applying wavelet filtering, the algorithm effectively mitigates the impact of multipath error on positioning accuracy. The efficacy of the algorithm is verified through both numerical simulation and measured data. Experimental results indicate that, after processing the measured GNSS slope data, the coordinate accuracy after multipath removal of the second-day observations is significantly improved. Particularly, a significant improvement is observed in the East (E) direction accuracy. This validates the algorithms effectiveness in GNSS slope environment, demonstrating its capability to enhance positioning accuracy effectively.
Keywords: GNSS; multipath error; slope monitoring; CEEMDAN; wavelet transform
0 引 言
全球导航卫星系统(Global Navigation Satellite System, GNSS)技术具有全天候作业、稳定性强、定位精度高和连续自动化测量等优势,使得该技术成为变形监测领域的重要监测手段,特别是危险性高、地质环境复杂和监测点布设困难的边坡变形监测任务对于GNSS技术具有更加强烈的依赖性。但是受卫星钟差及接收机钟差、电离层延迟等多种因素的影响,致使坐标时间序列出现明显的非线性变化特征,严重影响了定位精度。其中,多路径误差是影响GNSS定位精度的重要因素,经反射和散射的信号在合并后传入监测站,使得所接收的信号失真,解算精度受到严重影响。
因此,解决多路径误差成为本领域研究热点之一,现有方法主要分为基于硬件[1-3]、基于软件[4-5]和基于时空重复特性的多路径建模方法[6-7]。其中,多路径建模方法主要从时域分析、频域分析、时频分析三个研究方向开展,具有代表性的方法包括小波分解(Wavelet Decomposition, WD)[8]及经验模态分解(Empirical Mode Decomposition, EMD)[9],WD方法首先通过低通滤波及高通滤波进行信号分解,然后对噪较多的高频信号进行滤波处理,最后经过重构实现信号去噪,具有较好的信号时频特征提取能力。然而该类方法需要选择合适的小波基函数和阈值处理方法,以及适当的分解层数,才能达到最佳的降噪效果。EMD方法将非线性和非平稳信号分解成若干个固有模态函数(Intrinsic Mode Functions, IMF)。每个IMF都代表了信号中的一个局部特征,而且具有较好的时域局部性和频域带宽适应性,相较于WD具有更好的自适应性、模态解耦性及无损分解优势而得到了更广泛的关注。Wu等[10]通过对信号多次添加额外白噪声和分解得到一系列IMF,经过对IMF计算平均值获取更加稳定可靠的结果,用于改善EMD易受噪声影响的问题;Yeh等[11]在Wu[10]的基础上,通过将原始信号进行高通滤波来获得补充项,进一步增强信号的分解能力,提高分解结果的准确性和稳定性。之后,又有深度学习方法融合EMD进行降噪,如徐小汶等[12]将EMD与长短期记忆网络(Long Short-Term Memory,LSTM)融合实现多路径误差的削弱。
本文基于以往的研究成果,结合DW及EMD优势,提出了基于CEEMDAN(Complete Ensemble Empirical Mode Decomposition with Adaptive Noise)联合小波的GNSS边坡监测多路径误差处理算法,顾及GNSS信号的时域和频域,对多路径误差非线性和非平稳特性进行处理,实现了GNSS多路径误差有效削弱,提升去噪效果。
1 理论介绍
1.1 多路径误差
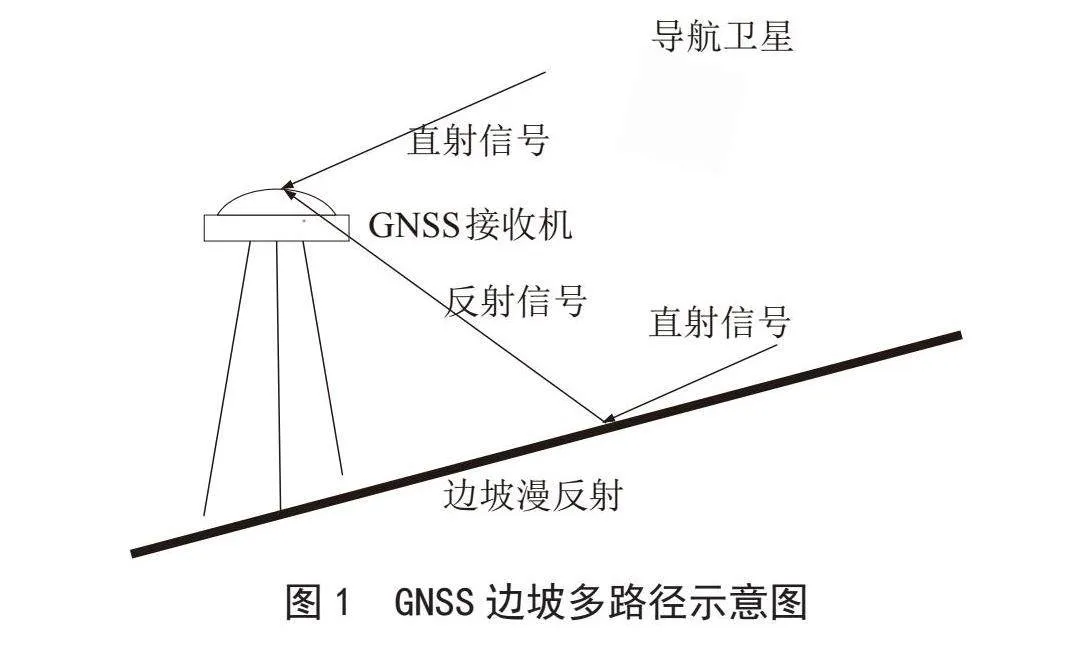
如图1所示,在GNSS接收机接收卫星直射信号的过程中,周围的环境会导致信号的折射或反射,形成多路径效应,进而引起干涉效应,对相位测量结果产生负面影响。本文主要探讨由于近距离边坡反射作用,增加了接收机接收到反射信号的可能性。复杂的信号路径导致信号多次到达,干扰了原始直射信号,影响了GNSS定位系统的测量准确性。为了应对多路径误差,需要采用先进的信号处理算法和技术手段,以最大限度地减少由于干涉效应带来的定位误差。当只有一个多路径存在,导航电文不计情况下,准确的直射信号可以表示为:
(1)
经边坡环境反射到达接收机的干扰信号可表示为:
(2)
经计算叠加求和后可整理为:
(3)
式中,,,可推导当∆=π时,相位偏移∆0=π/4,将最大产生大小约为6 cm的多路径误差。
由此进一步可知,多路径误差频率与反射物体距离相关,误差频率会随着反射物体距离增大频率逐渐增加。边坡反射信号为近距离反射产生的低频噪声,能够从GNSS定位坐标序列中消除。
1.2 CEEMDAN联合小波包算法原理
CEEMDAN是在EMD算法分量分解过程中自适应加入白噪声,通过最后的余量序列计算出各IMF分量,减小重构误差,提高数组完备性,减少集成次数提高数据处理效率。作为时频分析工具克服了EMD算法的模态混叠现象,分解效果更佳,用于对高低频率特征明显的GNSS多路径误差处理。小波包方法是对小波变换不敏感的高频部分进行再处理更好保留的数据特征。CEEMDAN联合小波包算法既提高了CEEMDAN算法对原始序列数据的分解精度,能够将原信号中的特征信息更好的保留下来,降低了高斯白噪声对精度影响。
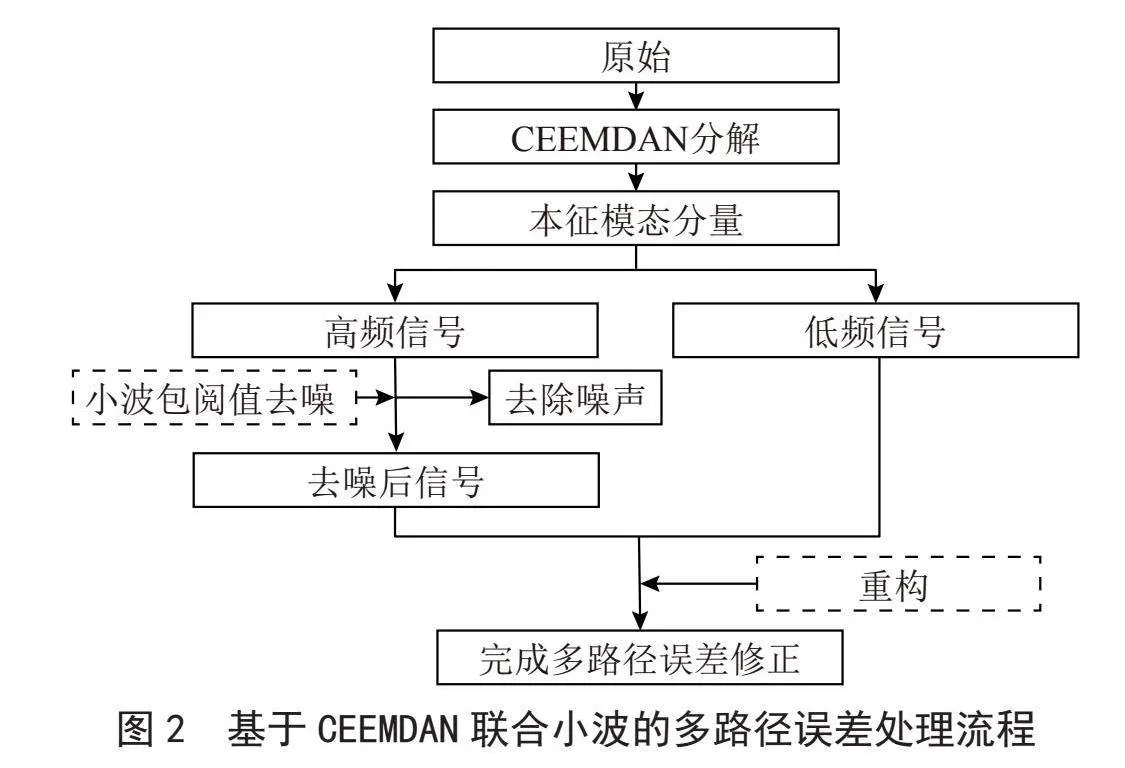
CEEMDAN联合小波包算法流程如图2所示,计算步骤如下:
1)加入白噪声序列到目标数据序列中;在原始GNSS观测序列x(t)中,mi(t)为第i步自适应加入的等长度、符合正态分布规律的白噪声序列,xi(t)为第次添加噪声后的数据序列,EMD分解产生的N次分解平均值记为固有模态分量IMF1,N为添加白噪声的次数。
(4)
(5)
然后将余量序列r1(t),循环计算得出r1t(t),完成N次试验后,IMF1分量计算结束。
(6)
2)完成初始计算后,开始计算第2阶段的固有模态分量IMF2:
(7)
重复计算直到k+1阶段,得到第k阶段的分解余量序列rk(t)和第k+1个固有模态分量IMFk+1:
(8)
(9)
3)判断条件下的余量序列极值点个数不大于2时,终止EMD分解过程。将得到的残差余量序列R(t)以及固有模态分量IMFk,结果可以表示为:
(10)
4)计算每个分量与原始信号的相关系数,确定小波包处理高频分量个数。
5)通过步骤(4)筛选出来的含有噪声的模态分量进行小波包降噪。
6)对分解滤波后的数据进行重构。
2 仿真实验及分析
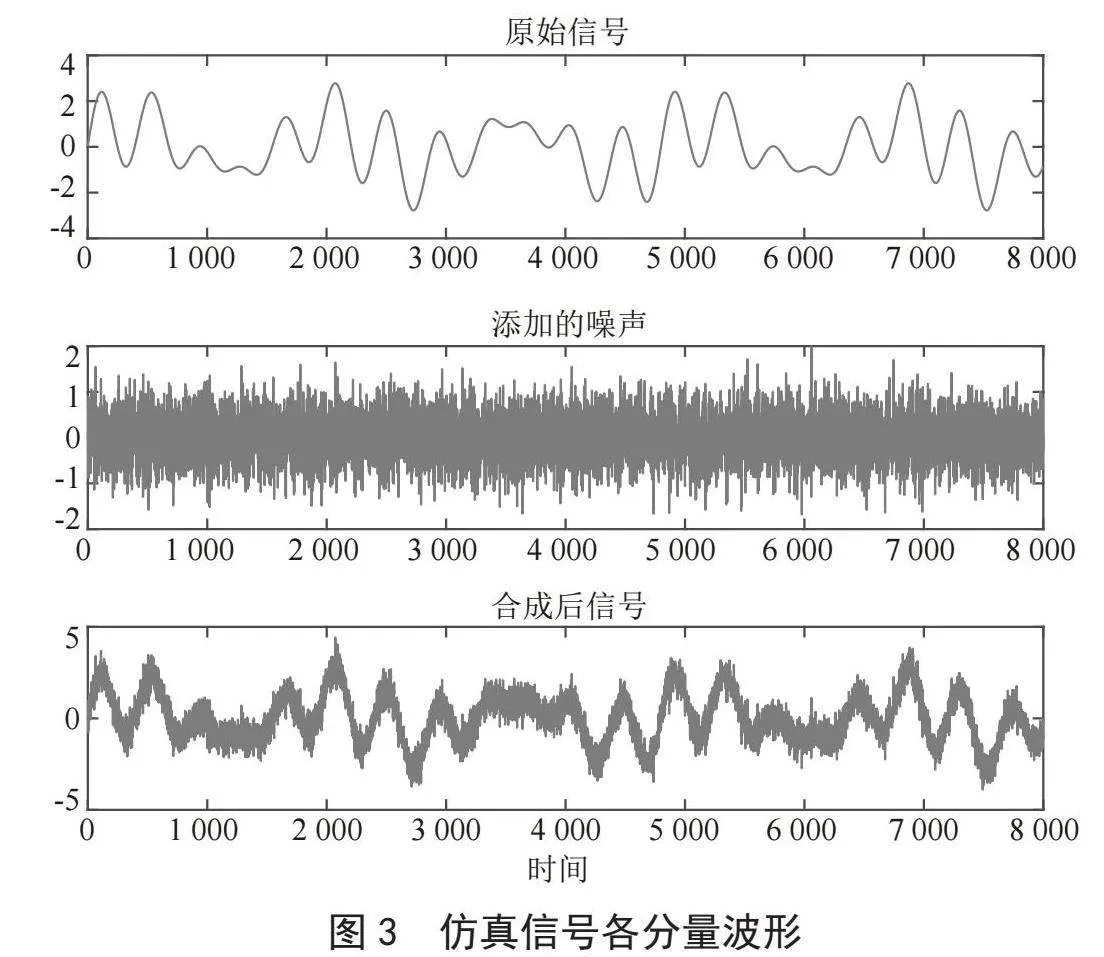
为测试算法噪声处理效果,但实测数据中真值测量存在误差,故先采用已知波形的仿真信号进行实验,以及将EMD、WD和本文方法进行对比,来验证本文算法有效性。实验使用MATLAB编程实现,设计生成了一个包含正弦波信号的仿真数据,并在信号中添加了一定水平的正态分布白噪声,形成带噪声信号。然后,利用了三种不同的降噪方法进行了对比实验,包括EMD、WD和CEEMDAN-WD。仿真数据的采样间隔为1S,样本数量为8 000,在模拟信号中添加正态分布白噪声。数据如图3所示,构建模拟信号模型为:
(11)
仿真实验设计在图3所示信号中进行,分别使用EMD、WD和本文方法对加入噪声后的仿真信号进行处理,本文选用EMD降噪算法作为对照组,首先将原始信号分解为一组称为本征模态函数(IMF)的基本信号。IMF是信号的局部特征,并具有不同的频率和振幅范围。再通过迭代确定局部极值点,不断获取第一轮的IMF,直至剩余的数据成为单调信号或噪声。经过降噪处理的IMF重新组合以重构原始信号,通过对高低频率信号筛选获取降噪后的纯净数据。实验中去除属于噪声部分的高频信号获取了重构数据。另一组对照实验选用“db8”作为小波基对原始信号进行小波变换,将信号分解为不同尺度和频率的成分。并进行阈值处理后利用逆小波变换重构了降噪后的信号。本文算法首先使用CEEMDAN对信号进行分解对高频部分使用小波完成筛选继续重构。保留了更多细节信息结果更加贴合纯净数据。
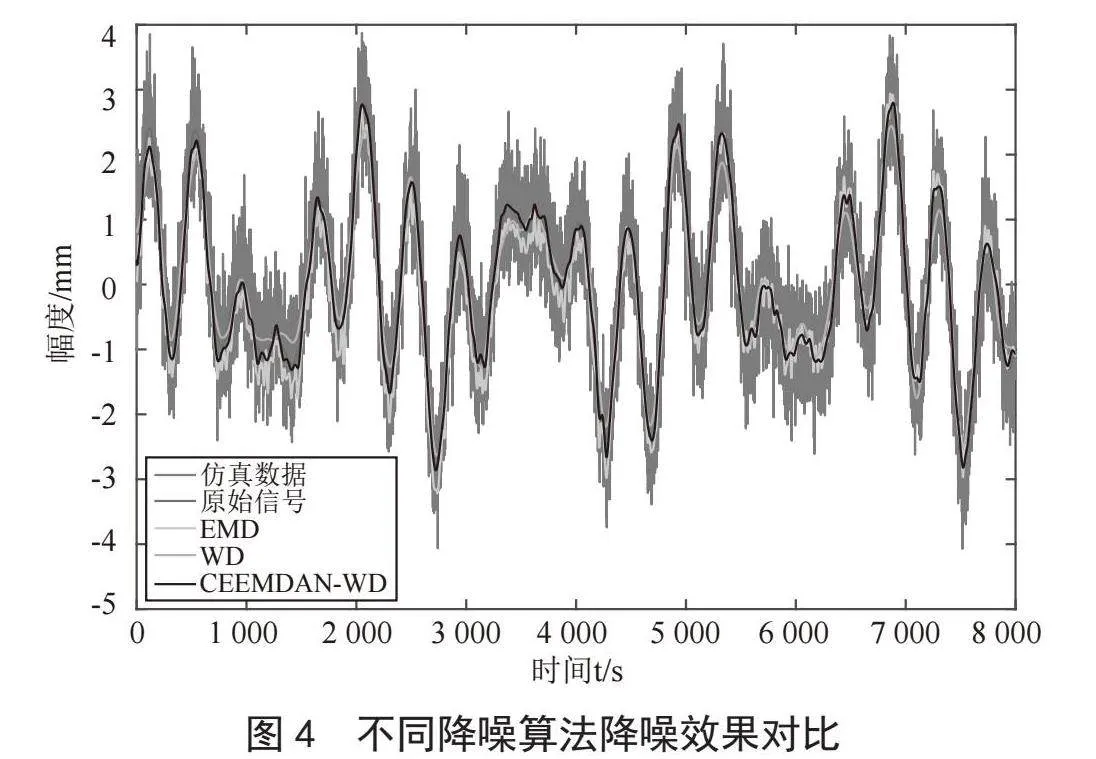
不同降噪算法降噪效果对比如图4所示,本文算法以及两种对比算法结果。可以看出,EMD、WD降噪后信号波形与原始序列拟合效果较差,而本文方法降噪后的波形与仿真原始信号更加接近,降噪后曲线更为光滑,本文算法有效避免了EMD降噪过程中模态混叠问题获取了更多的有效信号。
为了准确、客观衡量算法降噪性能,现采用均方根误差(RMSE)、平均绝对误差(MAE)作为降噪评价指标:
(12)
(13)
(14)
式中,i为历元时刻,x、y分别为降噪后信号和原始信号,、分别为对应其平均值,N为数据时间尺度。三种降噪模型去噪结果综合评价统计如表1所示。
从上述结果来看,CEEMDAN-WD算法在对噪声信号的处理效果要优于EMD算法和WD算法。可以被用于GNSS多路径误差的削弱工作。
3 GNSS边坡监测实测数据分析
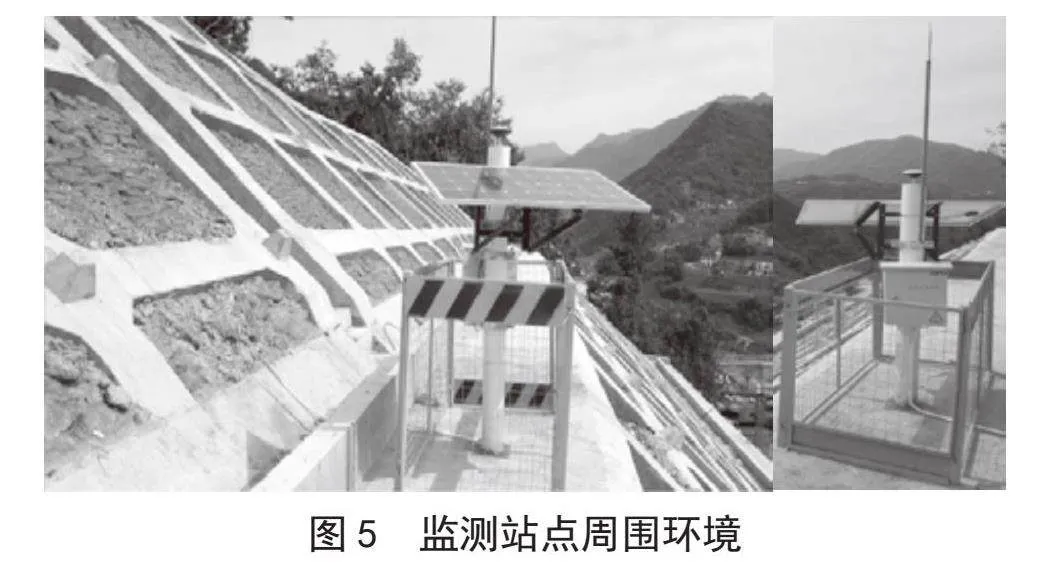
为验证CEEMDAN联合小波算法在GNSS边坡监测多路径误差处理中的有效性,在上述仿真实验的基础上,对GNSS实测数据进行处理来。本实验选用西南某高速公路边坡监测项目,受西南地势影响公路沿线边坡众多,地质条件复杂,经历长时间的降雨后,高边坡结构容易突发失稳,威胁行车安全。项目将基准站架设于山顶稳固位置,监测站布设于道路两旁加固后的边坡上,基线长度为238.6 m,接收机使用了国产一体化GNSS位移监测机进行数据采集,使用太阳能方式供电。设置卫星截止高度角设为10°,采样间隔为2 s,数据时间自2023年9月11日—2023年9月12日的,监测站环境如图5所示。
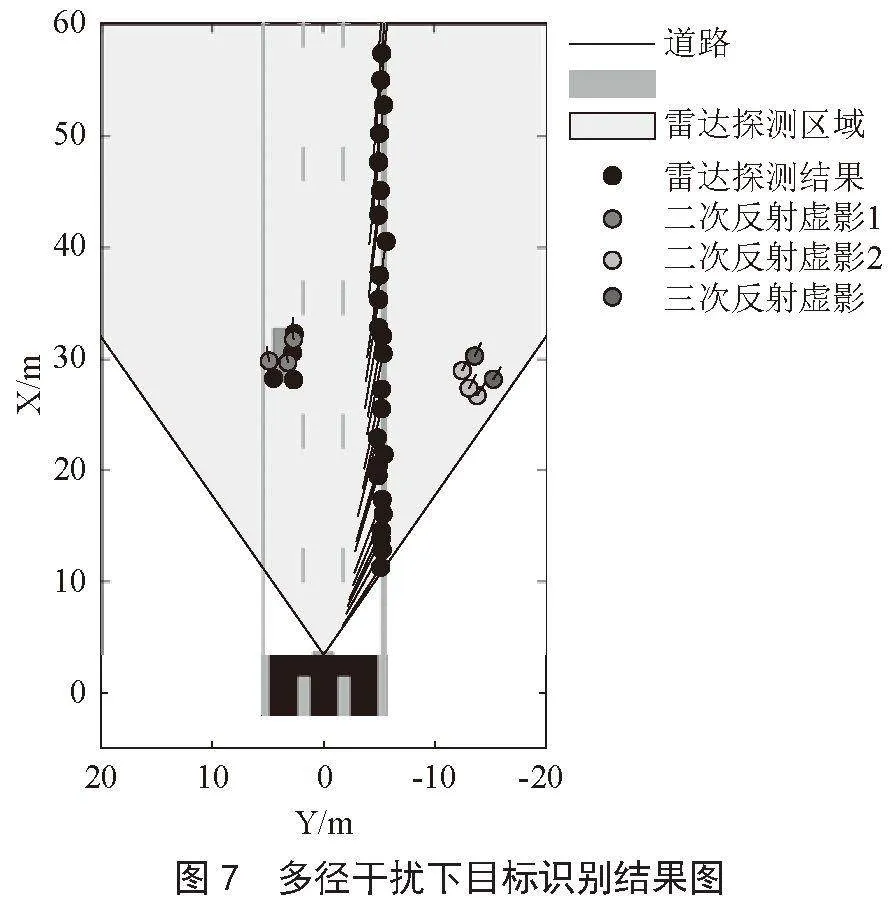
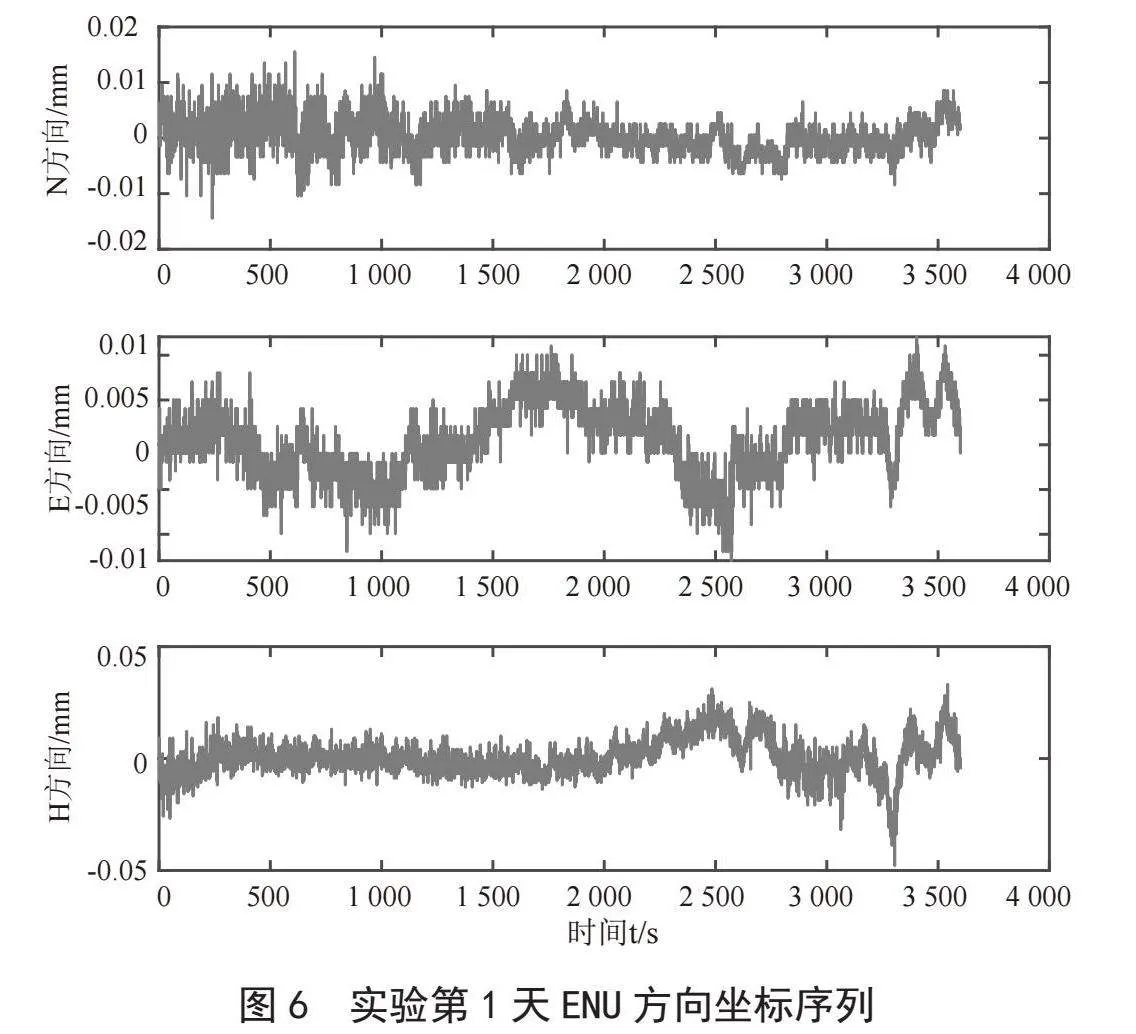
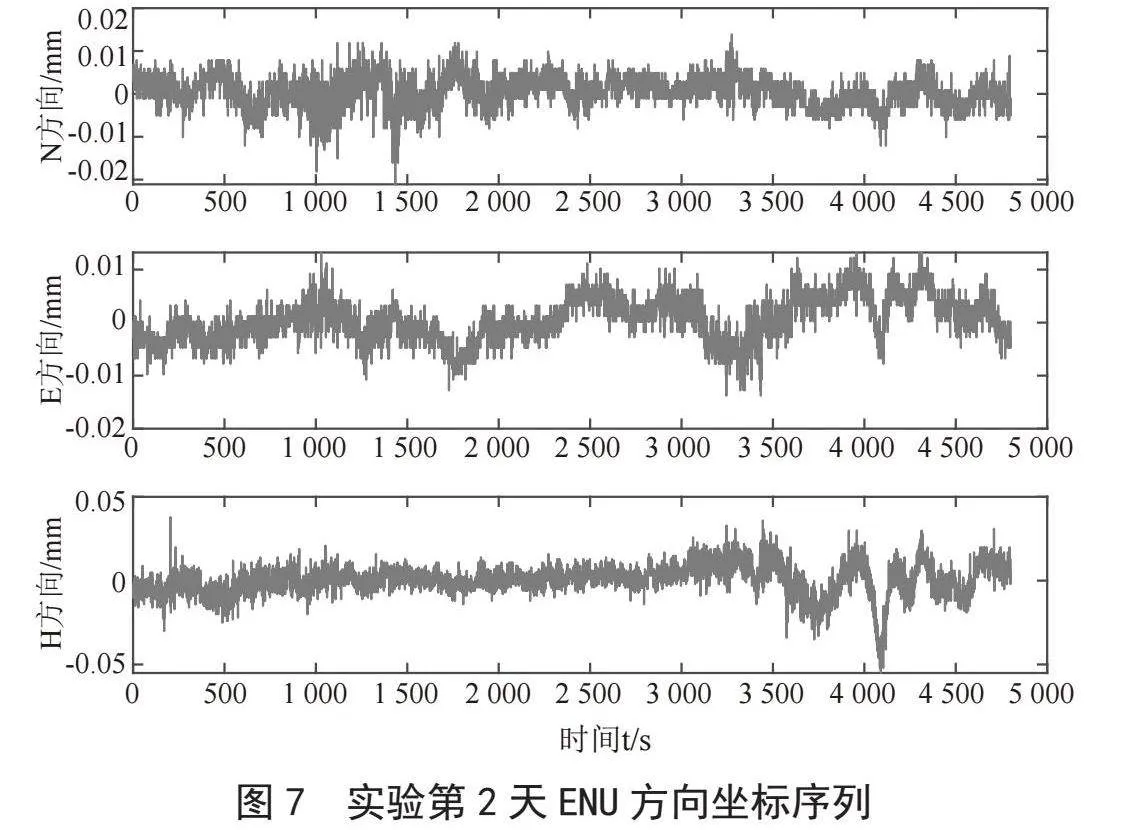
通过图6、 图7 可得,相邻2天坐标序列的趋势基本一致,且第2天的趋势线较前1天提前几分钟,计算同方向坐标序列的相关系数,说明相邻2天的坐标序列有较强的相关性,相关系数如表2所示。多路径效应主要表现为低频,而随机噪声表现为高频,使用CEEMDAN算法分解去除高频分量,能够降低多路径误差影响,同时小波包处理高频部分进行部分特征保留。由表2得出,相邻2天的坐标序列具有明显的相关性。因此,利用卫星具有周日重复性及提取的多路径误差序列对后续观测值进行误差改正。
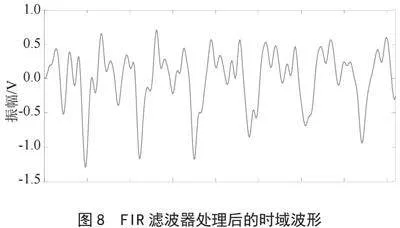
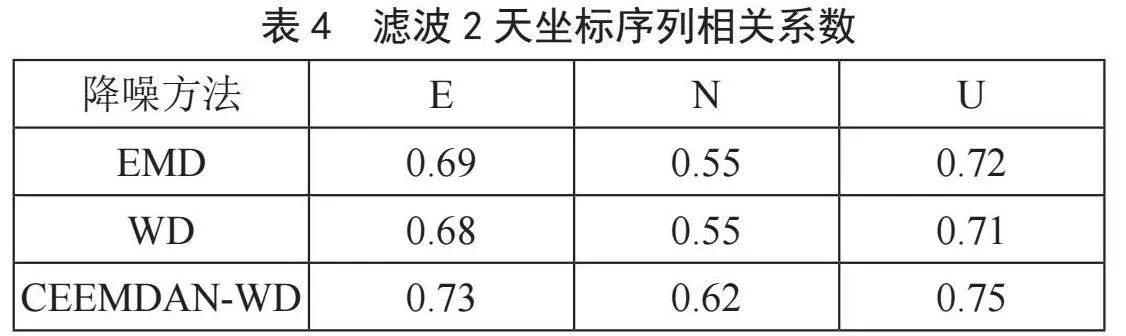
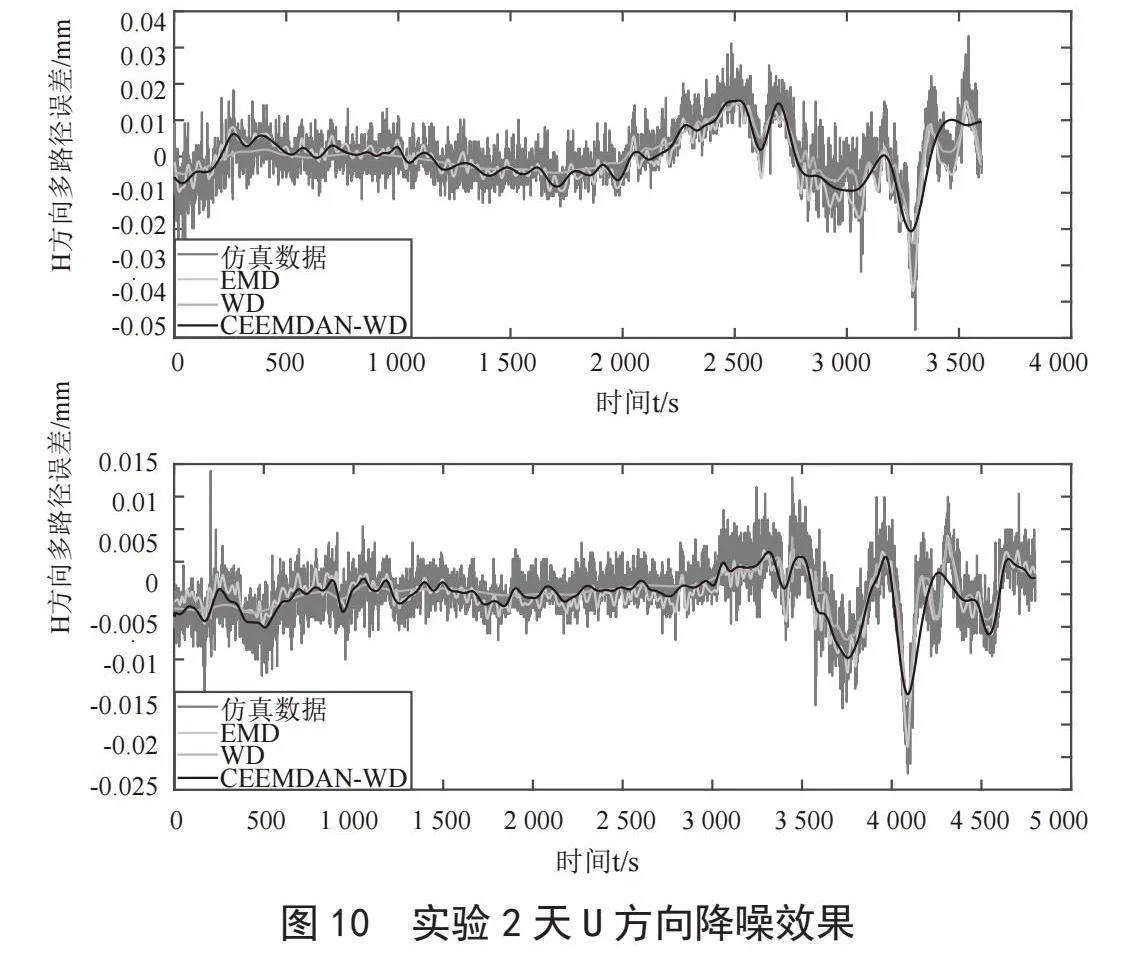
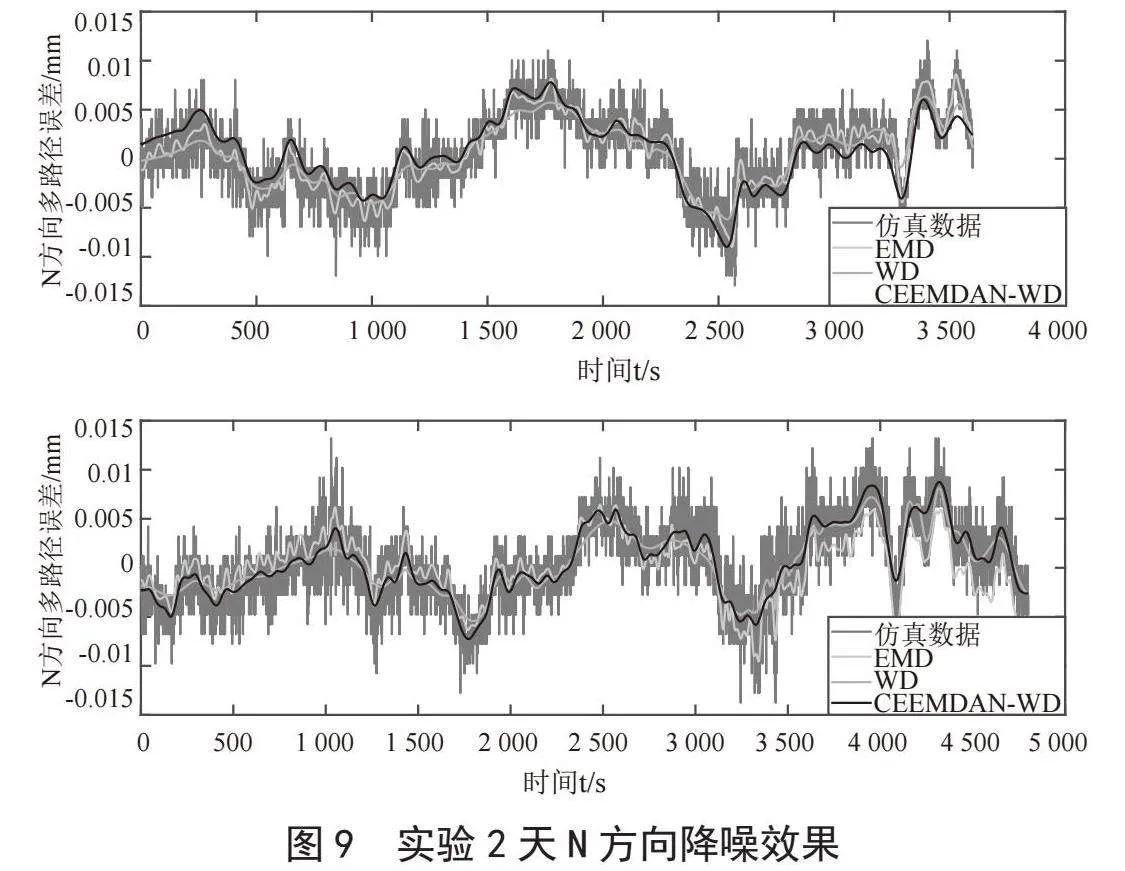
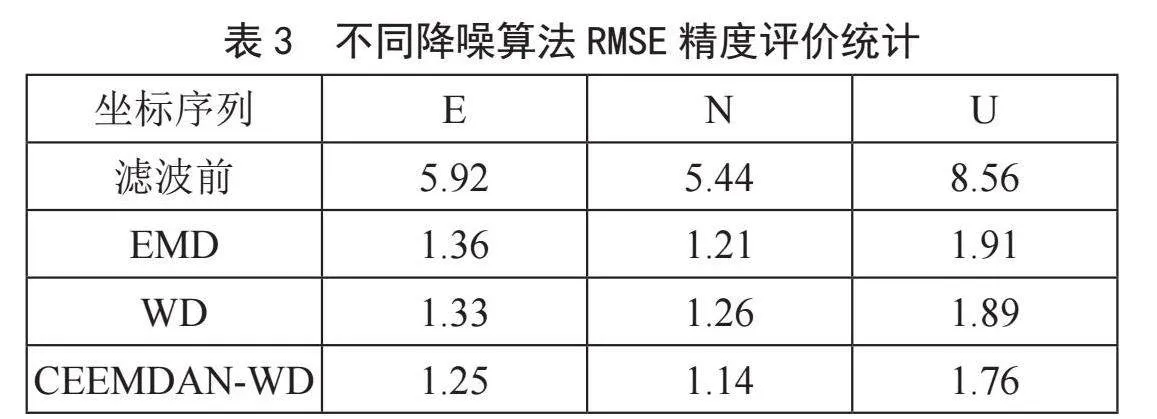
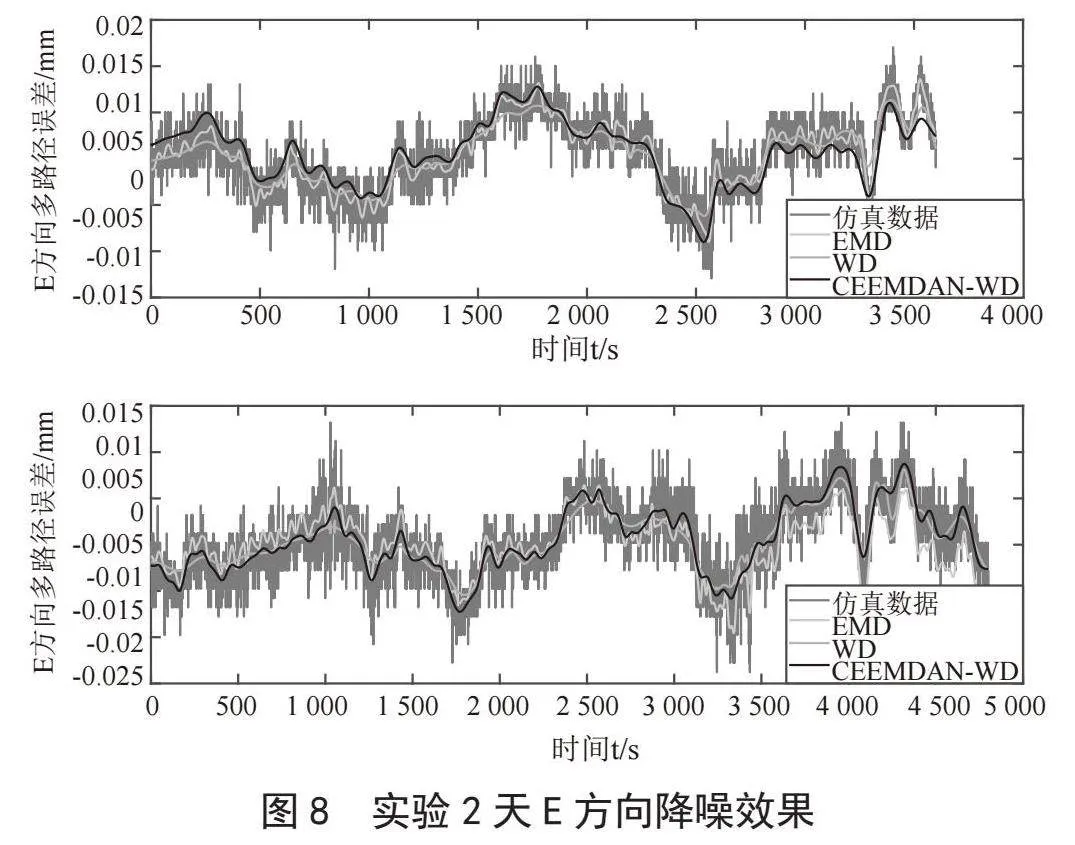
通过对站点进行降噪处理后,对其进行精度评价,精度结果如表3所示。如图8至图10为算法模型前后两天多路径误差提取效果展示,本文所构建的CEEMDAN-WD算法降噪后的评价指标均为最优。表明本文算法能够有效地提取出更多的有用信号,同时由表4得出,相较于EMD和WD算法,本文算法能够更好地去除随机噪声。还有滤波前后,GNSS坐标序列前后2天相关系数较高,为了消除边坡变形监测数据中GNSS多路径效应影响,进一步提高监测精度和灵敏度;利用了第1天坐标序列噪声剔除得到的多路径模型,对第2天坐标序列,按照延迟理论值-118历元进行剔除,得到剔除理论相关系数最大多路径后的坐标序列。
4 结 论
基于CEEMDAN联合小波的GNSS边坡监测多路径误差处理算法,同时考虑了GNSS信号的时域和频域,对多路径误差非线性和非平稳特性进行处理,实现了GNSS多路径误差有效削弱。并将本文算法与EMD、小波分解算法进行了数值仿真和监测数据的比照实验,结论如下:
1)在数值仿真实验过程中,对比分析了CEEMDAN联合小波算法、EMD算法及小波分解算法对模拟信号的降噪效果,得出CEEMDAN联合小波算法的噪声信号处理效果较EMD、小波分解算法更加优秀,证明了CEEMDAN联合小波算法可用于GNSS多路径误差处理。
2)将CEEMDAN联合小波算法用于实测GNSS边坡监测数据处理实验,结果表明,CEEMDAN联合小波算法对GNSS边坡监测观测数据的多路径误差处理效果优于EMD、小波分解算法,采用CEEMDAN联合小波算法对GNSS边坡实测数据进行处理后,用来对第二天观测值进行多路径剔除,剔除后的坐标精度明显提高,特别是在E方向的精度改善显,有效削弱了多路径误差对GNSS边坡监测场景下定位精度的影响,能够有效提高定位精度。
参考文献:
[1] 陆明泉,姚铮,崔晓伟,等.北斗三号B1频点卫星导航信号的调制复用及实际接收性能 [J].中国科学:物理学 力学 天文学,2021,51(1):40-51.
[2] IRSIGLER M,HEIN G W,EISSFELLER B. Multipath Performance Analysis for Future GNSS Signals [C]//Proceedings of the 2004 National Technical Meeting of The Institute of Navigation. San Diego:[s.n.],2004:225-238.
[3] TANG W M,WANG Y W,ZOU X,et al. Visualization of GNSS Multipath Effects and its Potential Application in IGS Data Processing [J].Journal of Geodesy,2021,95(9):1-13
[4] 李鹏博,胡志刚,周仁宇,等.基于观测值域的多路径消除方法及其在GNSS实时变形监测中的应用 [J].大地测量与地球动力学,2018,38(8):840-845.
[5] 柳景斌,毛井锋,吕海霞,等.BDS/GPS组合定位可靠性分析与粗差探测研究 [J].武汉大学学报:信息科学版,2023,48(2):214-223.
[6] 朱霆.基于时空域方法的短基线载波相位多路径误差建模研究 [D].徐州:中国矿业大学,2021.
[7] 刘程毅,王凯,陈雷,等.基于Adam梯度下降的GNSS载波多路径建模方法研究 [J/OL].武汉大学学报:信息科学版,2023:1-18[2024-03-07].https://doi.org/10.13203/j.whugis20230171.
[8] 吴继忠,花向红,高俊强.基于小波包分解的结构自振特征提取及多路径误差分离 [J].武汉大学学报:信息科学版,2010,35(4):486-490.
[9] 刘思敏,徐景田,鞠博晓.基于EMD和RBF神经网络的大坝形变预测 [J].测绘通报,2019(8):88-91+95.
[10] WU Z H,HUANG N E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method [J].Advances in Adaptive Data Analysis,2009,1(1):1-41.
[11] YEH J R,SHIEH J S,HUANG N E. Complementary Ensemble Empirical Mode Decomposition: A Novel Noise Enhanced Data Analysis Method [J].Advances in Adaptive Data Analysis,2010,2(2):135-156.
[12] 徐小汶,陶远.基于EMD-LSTM耦合预测模型的BDS多路径误差削弱方法研究 [J].全球定位系统,2020,45(2):98-104.
作者简介:关志宇(1983—),男,满族,黑龙江齐齐哈尔人,讲师,硕士研究生,研究方向:地理信息系统;钟秋文(1994—),女,汉族,江西赣州人,研究方向:工程造价;韦晚秋(1996—),女,壮族,广西河池人,硕士研究生,研究方向:遥感数据处理及应用;兰猗令(1998—),女,壮族,广西河池人,硕士研究生,研究方向:“3S”集成技术研究;金相任(1994—),男,侗族,广西河池人,助理工程师,本科,研究方向:GNSS技术研究。