

摘" 要:交通道路环境下工作的雷达间产生的多径干扰会导致雷达出现虚假目标。为此对解决雷达信号的多径干扰问题开展以下研究。首先探讨了邻近汽车雷达系统产生的多径干扰,将其定性为一种动态随机过程。为了验证整个处理流程,利用MATLAB软件进行了仿真实验,重点模拟了测距、测速和测角算法。通过对数据进行对比分析,对雷达的性能指标进行了评估。随后,建立了高速公路模型,并构建了雷达模型,同时设定了相应的参数。利用信号处理函数,成功获取了目标车辆的速度、距离和方位信息。最终,通过绘制雷达车辆的鸟瞰图,直观展示了研究成果。
关键词:车载雷达;信号处理;毫米波雷达;多径干扰
中图分类号:TP391 文献标识码:A 文章编号:2096-4706(2024)22-0117-05
Radar Signal Processing for Automated Vehicle Driving in Highway Scenarios
Abstract: Multipath interference generated between radars operating in a traffic road environment can lead to 1 targets on radars. To this end, the following research is carried out to solve the problem of multipath interference of radar signals. Firstly, the multipath interference generated by the adjacent vehicle radar system is discussed, and it is characterized as a dynamic stochastic process. To validate the entire processing pipeline, simulation experiments are conducted utilizing MATLAB software, with particular emphasis on the simulation of the ranging, velocity and angle measurement algorithms. Through the comparative analysis of data, this paper estimates the performance metrics of radar. Subsequently, it establishes a highway model, constructs a radar model, and defines specific parameters at the same time. By utilizing signal processing functions, the velocity, distance, and azimuth information of the target vehicles are derived. Finally, the research results are visually displayed through drawing an aerial view of the radar vehicle.
Keywords: onboard radar; signal processing; millimeter-wave radar; multipath interference
0" 引" 言
随着汽车自动驾驶技术的不断发展,如今汽车雷达正向更高等级的自动驾驶领域迈进。在此期间,多项关键技术的发展令汽车雷达可以应对更为复杂的探测环境,实现更优的目标量测与跟踪性能[1]。毫米波雷达作为一种主动式传感器,具有全天候工作、探测距离远、测距精度高和天气适应能力强等优势,相比昂贵的激光雷达又有明显的成本优势,成为汽车辅助驾驶的关键传感器[2]。而多径效应作为一种普遍存在的现象,对雷达系统的性能构成了显著的挑战。本研究旨在探索汽车自动化驾驶的雷达信号处理技术以及多径效应在道路上的影响。在本篇论文前,已经有针对不同类型的雷达传感器和不同应用场景,前人工作提出了一系列有效的信号处理算法和技术,以提高雷达系统的感知性能和鲁棒性。此次实验对高速公路进行建模,并模拟雷达系统在实际场景中受到的多径效应影响。
1" 毫米波雷达工作原理
1.1" FMCW雷达简述
车载毫米波雷达有两种波形:FMCW和脉冲。FMCW具有高距离分辨率、无近距离盲区、低发射频率、简单结构和低成本等优势。FMCW雷达发送的频率随时间变化,通常采用三角波或锯齿波调制,用于测量目标距离和速度。
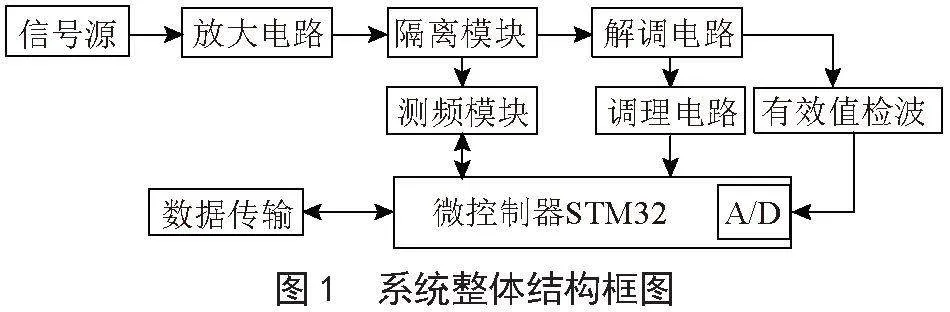
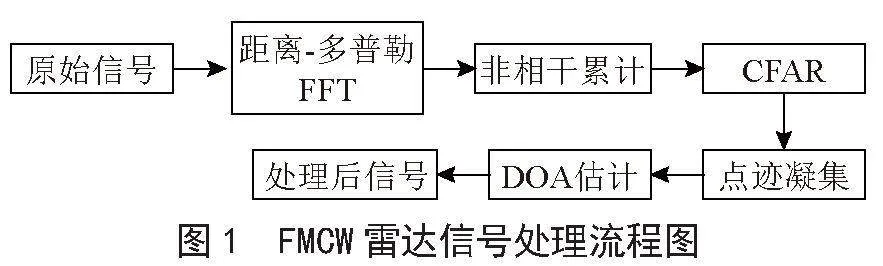
调频连续波雷达工作原理是:信号发生器产生调频波形,经过综合器产生调频连续波[3]。部分信号经过功放放大后由发射天线发送,另一部分与接收信号混频。接收到的信号经过混频器去斜、低通滤波器处理后得到差频信号。差频信号经过ADC转换为数字信号,然后进行信号处理和数据处理,通过外部接口传输到其他系统。车载毫米波雷达的信号处理流程如图1所示。
1.2" FMCW雷达信号模型
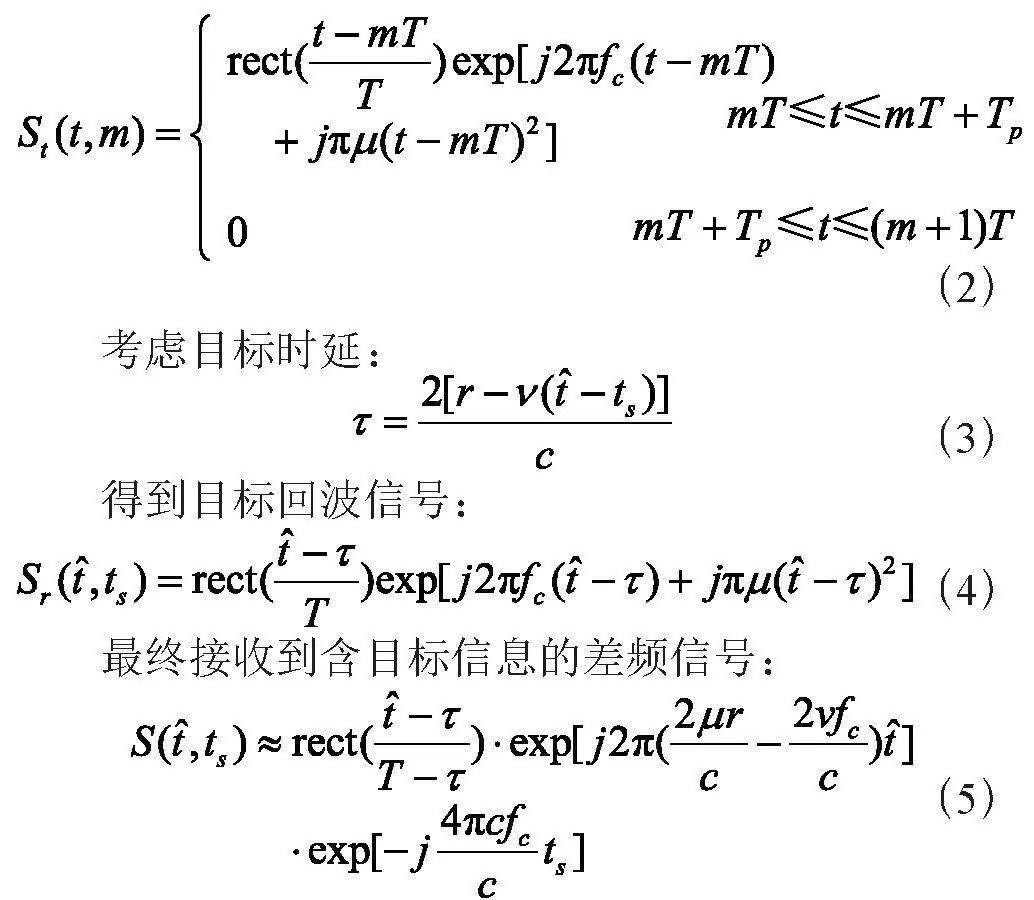
车载毫米波雷达采用77 GHz的锯齿波LFMCW波形为:
同时处理多周期的差频信号,并忽略初始随机相位和信号增益,发射信号简化为式(2):
1.3" FMCW雷达工作原理
1.3.1" 雷达测速测距原理
雷达测速测距原理是基于电磁波的发送和接收。当雷达发射器向目标发送电磁波时,这些波会被目标反射回来并被雷达接收器接收到[4]。雷达利用接收到的波的性质,如频率、相位和幅度等,来确定目标的距离和速度。
多普勒测距法一般利用目标运动导致接收到的信号频率发生变化的原理。这种变化与目标的速度成正比。通过测量这种频率变化,可以推断出目标的速度。距离和速度通常通过不同的信号特征(例如,频率、相位)来测量。
测速原理基于多普勒效应,即目标运动会导致接收到的信号频率发生变化。这种变化与目标的速度成正比。雷达测量这种频率变化,并根据多普勒频移来确定目标的速度。
1.3.2" 角度测量原理
车载毫米波雷达利用阵列天线进行角度测量[5]。阵列天线产生多个定向波束,每个指向不同方向。不同波束接收到的信号强度差异可确定目标相对雷达的角度。控制阵列天线的相位和振幅,雷达形成良好方向性的波束,实现对目标位置的精确测量。
在远场条件下,不同接收天线的微小相位差异可用于计算目标相对雷达的角度,适用于相位差多普勒雷达(PDDR)或相位阵列雷达(PAR),有助于系统高效定位和测量目标角度。
1.4nbsp; 雷达信号处理流程
1.4.1" 距离-多普勒2D-FFT
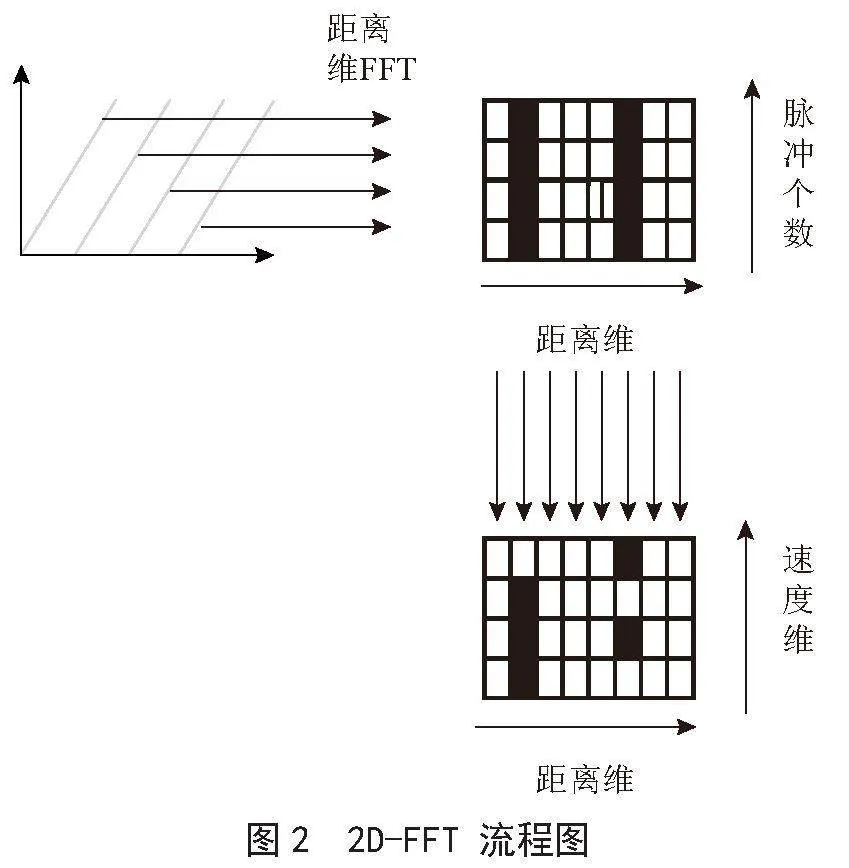
2D-FFT流程如图2所示:每个chirp进行ADC采样并形成矩阵,对每行进行FFT处理得到距离信息,每行有两个谱峰表示两个不同距离的目标,然后对每列进行FFT处理得到速度信息,区分不同速度的目标。
1.4.2" 非相参积累
在距离-多普勒二维快速傅里叶变换(2D-FFT)中,对每个矩阵的功率进行叠加是必要的。目标信号和噪声叠加时,噪声的随机相位导致信号在不同积累周期间产生波动。为了消除这种波动,可以采用非相参积累对叠加后的信号加噪声进行多个积累周期的平均。这样可以减少噪声对目标信号的影响,提高目标信号的提取准确性。同样,叠加后的功率也可以帮助准确提取目标参数索引。
1.4.3" 二维恒虚警检测
噪声是雷达信号处理中的常见干扰,影响信号的准确性和分辨率。恒虚警检测技术通过设定固定虚警率,自动调整雷达的灵敏度,以保持恒定的虚警概率。这有助于过滤掉低于虚警率的信号,减少对目标检测的干扰,提高信号质量和准确性。
车载毫米波雷达通常采用二维CFAR检测确定目标的距离和速度单元,其中十字窗是常用的方法。它通过计算杂波功率,并根据门限系数计算距离和速度维度上的杂波门限阈值,最后将待检测单元的功率与这两个门限进行比较,以确定是否存在目标[6]。
1.4.4" 点迹凝聚
雷达信号处理中常用点迹凝聚方法,以增强信号和提高处理精度。在频谱泄露下,距离-多普勒二维快速傅里叶变换(2D-FFT)可能导致模糊旁瓣,影响目标检测准确性。为了抑制这些虚警点,常用恒虚警率(CFAR)检测方法。
点迹凝聚基于目标回波的距离和方向频谱特性,保留有用点迹并清除干扰。首先,对有用点迹进行距离和方向分辨,然后求取点迹数据的质心作为目标参数估值,这有效提取目标信息并提高处理准确性。
1.4.5" DOA估计
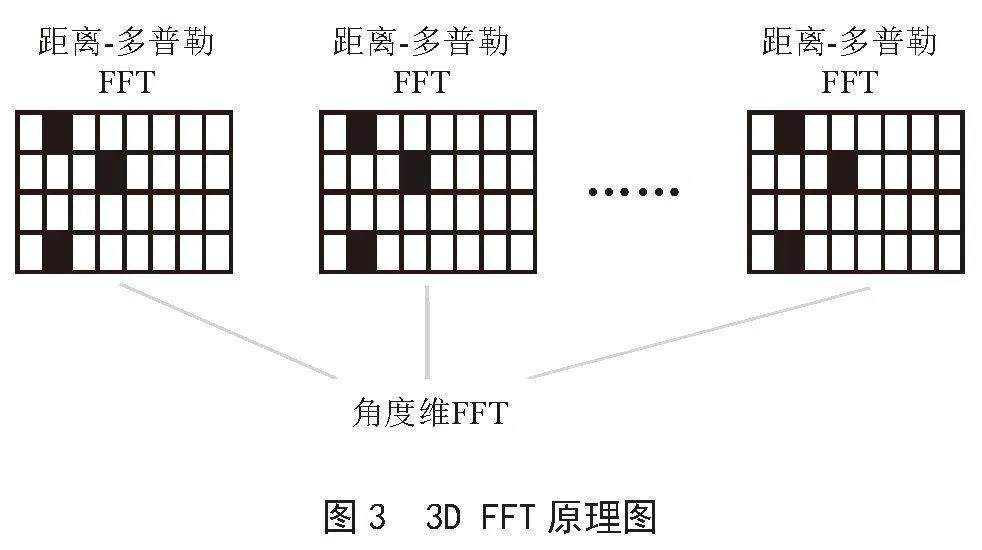
DOA估计用于确定信号来源方向,常见算法包括最小距离、最大似然和卡尔曼滤波。3D-FFT算法是一种常用的到达角估计算法[7]。
该算法通过距离-多普勒的二维FFT处理信号,然后对所有接收通道进行FFT处理,并依次排列结果,得到每个目标角度的估计值。基于回波信号的自相关矩阵与功率谱之间的傅里叶变换关系,通过检测峰值位置,可以估计出目标的到达角度。
2" 多径效应仿真
在车载雷达系统中,目标识别的精确性对于实现高效的交通监控和安全管理极为重要。其中雷达信号传播的路线对目标识别的精确性有着至关重要的影响。理想的汽车雷达信号传播路线为雷达发射的信号直接从发射天线传播到目标物体,然后直接反射回接收天线,没有经过任何反射、折射或散射等多径效应的影响。
然而,多径效应作为一种普遍存在的现象,对雷达系统的性能构成了显著的挑战。多径效应会导致雷达信号在到达接收器之前经历多次反射、折射和散射,形成多条路径,从而在雷达接收到的信号中引入额外的复杂性和不确定性。由于多径效应的影响,毫米波雷达的定位和跟踪往往会出现异常值和虚轨迹[8]。这种效应不仅会降低信号的质量,还可能导致目标位置的误判和识别错误,对车载雷达系统的有效性产生负面影响。
本节将对高速公路进行建模,并模拟雷达系统在实际场景中受到的多径效应影响。在仿真实验中,我们特别关注多径效应如何影响雷达信号的特征提取和目标识别算法的性能。
最终,本节的目标是仿真研究对于公路场景,考虑车载雷达在前视探测过程中受到多径干扰的影响,导致检测结果出现误差。分析常见的三次反射模型,根据仿真结果总结出定性结论。这将有助于直观认识到多径效应可能导致目标位置的误判和识别错误,对车载雷达系统的有效性产生负面影响。
2.1" 多径效应的基本原理
多径效应是指在无线信号传播过程中,由于反射、折射、散射和绕射等现象,导致信号通过多个不同的路径到达接收器的现象。这些不同的路径会导致信号的时延、相位、幅度和极化等特性发生变化,从而影响信号的接收和处理[9]。多径效应主要由以下几个因素产生:
1)反射:信号遇到比波长大得多的物体时,会产生反射。反射信号可能会与直接路径信号相互干涉,导致信号强度的增强或减弱。
2)折射:当信号通过不同介质时,如空气和水蒸气,信号的速度会发生变化,导致折射现象。
3)散射:信号遇到小尺度的障碍物,如雨滴、树叶或灰尘,会产生散射,形成多个传播路径。
4)绕射:当信号遇到障碍物的边缘时,会产生绕射现象,形成非直线传播路径。
2.2" 建立公路模型
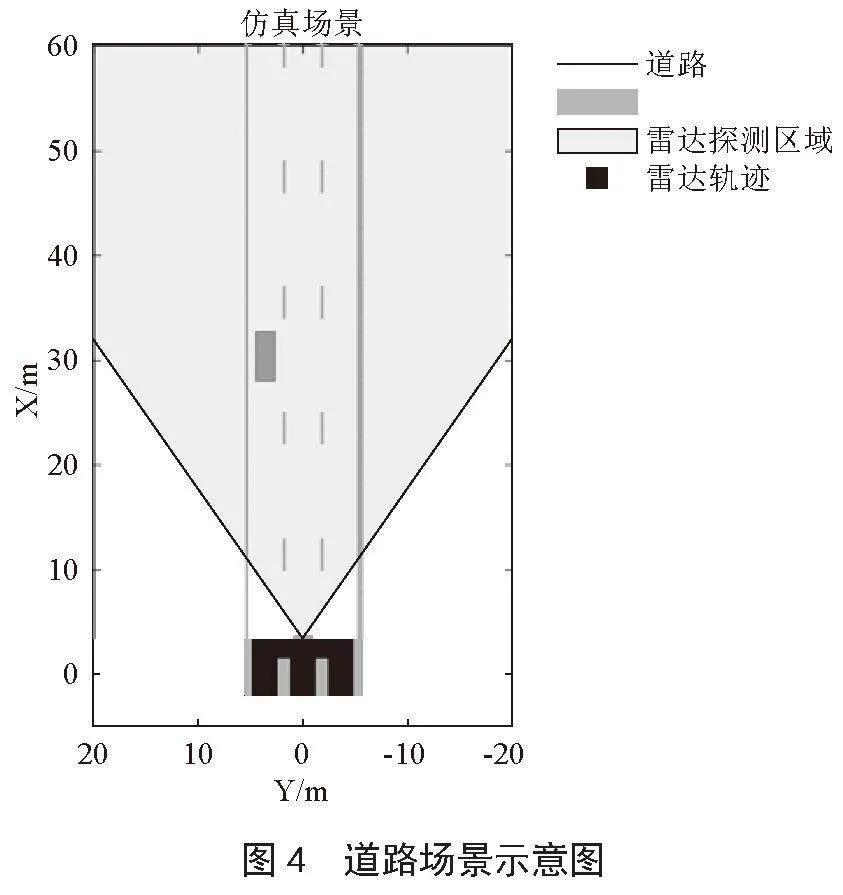
我们通过创建驾驶场景,添加道路及护栏,添加车辆并设置参数等步骤建立了一个公路模型,如图4所示。
2.3" 构建雷达模型
2.3.1" 雷达建模
雷达建模过程如下:创建雷达数据生成器对象,设置雷达参数,设置雷达目标报告格式,设置雷达目标类型和属性,处理多径效应,生成雷达检测结果,设置雷达滤波器和跟踪算法,雷达接收机建模,处理雷达信号[10]。
2.3.2" 雷达参数
在本次仿真实验中,雷达波形为调频连续波波形,我们将对一个高性能的车载雷达系统进行建模和测试,该系统的参数配置如表1所示。
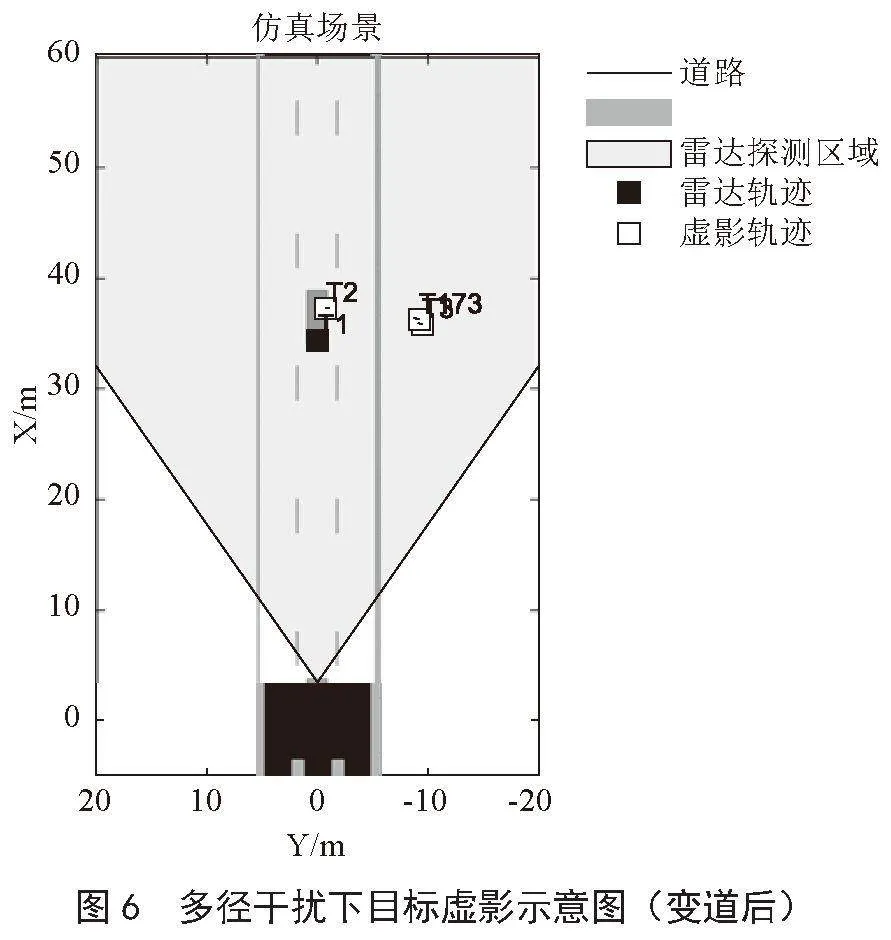
基于这些参数,我们将构建一个详细的车载雷达系统模型,并在MATLAB环境中进行仿真。仿真将模拟雷达在公路交通场景下的操作,评估其在实际应用中的性能表现。仿真结果如图5、图6所示。
2.4" 结果分析
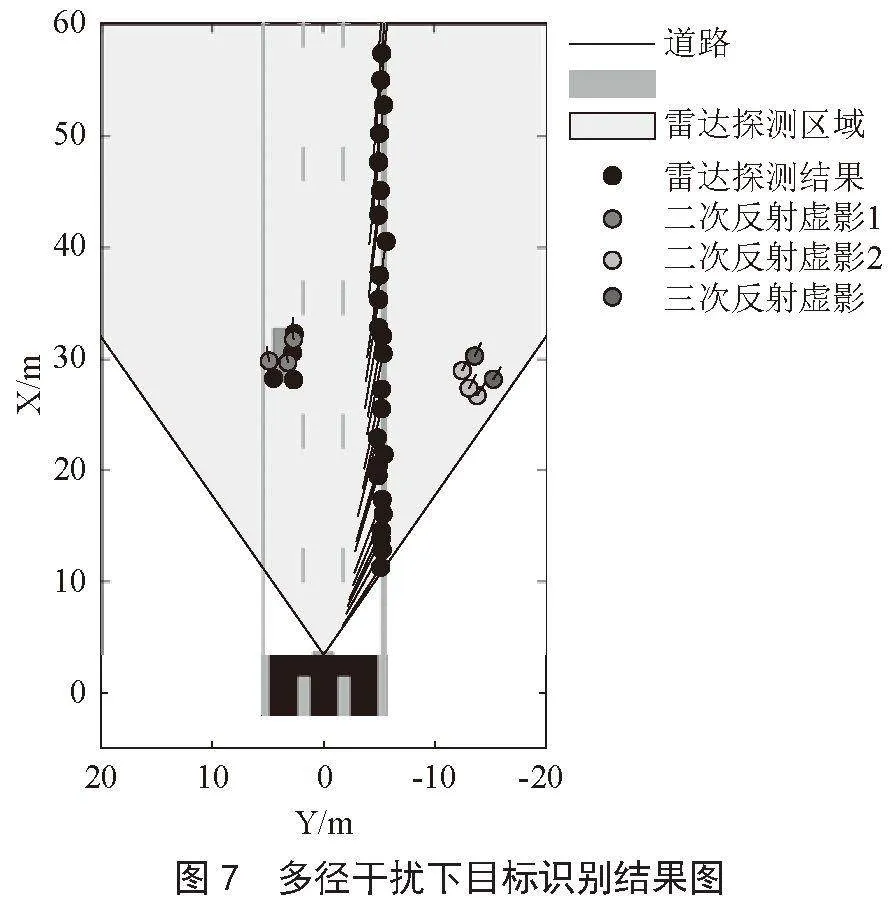
道路场景中,栏杆、路障等障碍物会使雷达发射信号产生散射现象,因此雷达探测过程中会收到来自同一目标但时延不同的多个回波信号,导致目标检测出现多径效应,如图7所示。
在研究多径效应时,通常只会考虑信号传播经过的前几次反射(通常为一至三次反射),有以下几点原因:
1)信号强度衰减。每次反射都会导致信号强度的衰减。随着反射次数的增加,信号强度会指数级下降,因此在多次反射后的信号对接收信号的总体贡献会非常小。
2)主要路径。第一次反射通常会产生最强的多径信号,因为它直接与目标物体和反射表面之间的距离相关。随后的几次反射可能会产生显著的次要路径,但它们的强度通常远低于第一次反射。
3)复杂性管理。随着反射次数的增加,信号传播路径的复杂性会急剧增加,这会导致信号处理算法的复杂度和计算负担显著增加。限制反射次数可以简化问题,使其更易于处理。
4)实际影响。在许多实际应用中,第一次和随后几次反射的信号已经足够覆盖大部分可能影响接收信号的多径效应。更远的反射路径对系统性能的影响可能可以忽略不计。
5)算法性能。在车载雷达系统中,信号处理算法通常被设计为能够处理有限次数的反射。这些算法的性能已经在多次实验和实际应用中得到了验证。
下面对三次反射模型进行解释。
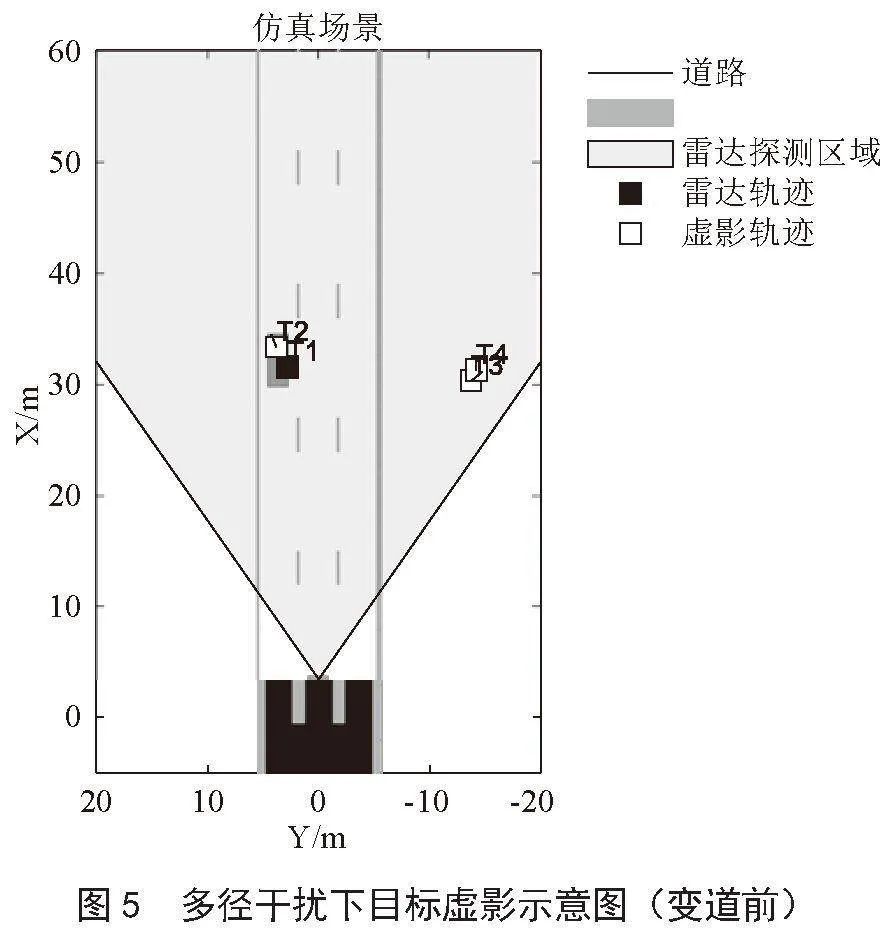
二次反射:前两次反射路径从雷达传播到反射面,然后传播到目标,然后返回到雷达。由于雷达接收到的信号来自真实目标的最后一次反弹,因此它产生了与真实目标相同方向的虚影探测。由于这种传播的路径长度较长,因此它出现在比真实目标检测更远的距离上。第二个双反弹路径从雷达传播到目标,然后传播到反射面,然后返回到雷达。在这种情况下,当雷达接收到该方向的反射信号时,虚影目标出现在反射面的另一侧。
三次反射:三次反射路径从障碍物上反射两次。这条路径永远不会直接传播到目标或直接传回雷达。当雷达接收到该方向的反射信号时,三反射虚影探测出现在反射面的另一侧。此外,它具有三个反射路径中最长的传播路径,因此具有三个路径中最长的测量范围。这条路径对应于屏障另一侧真实目标的镜像反射。
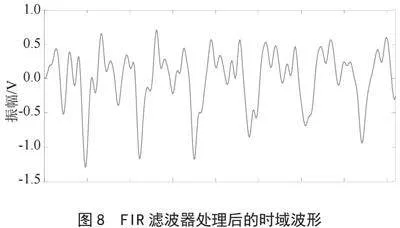
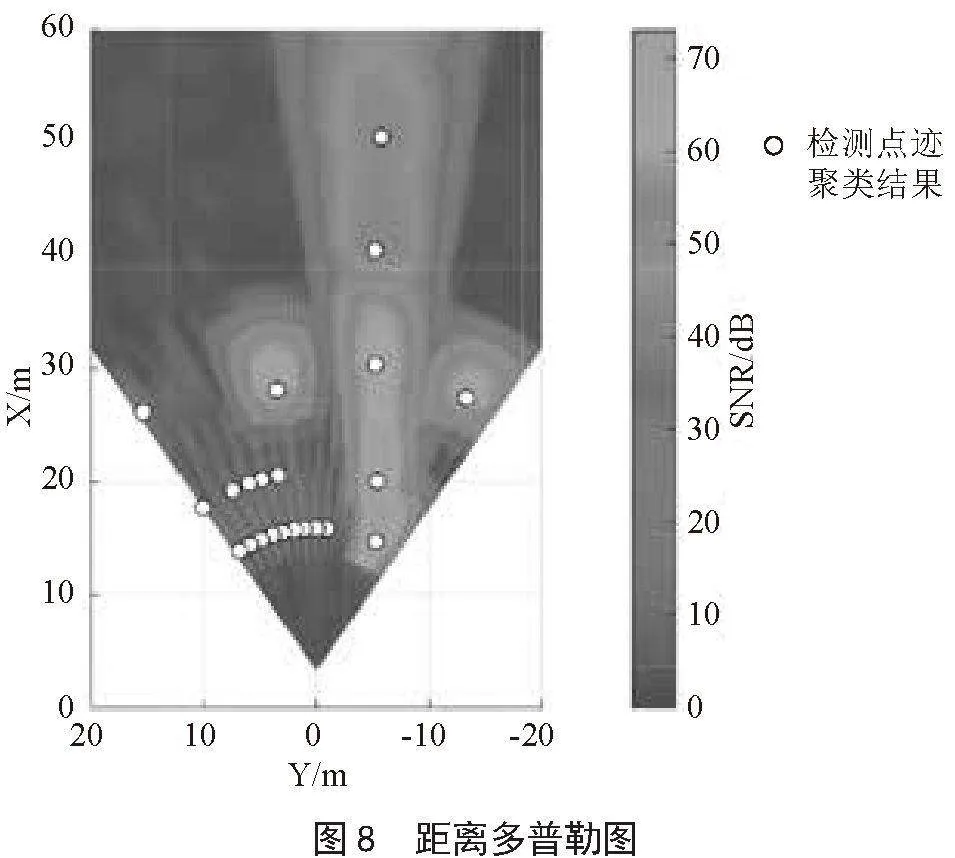
检测点迹经过聚类分析后,得到结果如图8所示。可以看到探测点主要集中在目标和栏杆处,栏杆的左侧为目标,右侧为多径效应产生的虚影。
3" 结" 论
探讨了毫米波雷达的基本工作原理和多径效应的影响,通过仿真实验验证了多径效应的存在性及其对雷达性能的影响。未对多径效应的抑制进行深入研究,但针对多径效应的影响,可以从以下几个方面进行改进:增加发射功率、采用多普勒处理技术、利用多天线接收等,我们期待未来的研究能够在多径效应的抑制等方面取得更大的进展。
参考文献:
[1] 郑乐,龙腾,龙佳敏,等.汽车雷达关键技术分析与展望 [J].太赫兹科学与电子信息学报,2023,21(4):437-451.
[2] 魏豪.77G毫米波汽车防撞雷达设计与实现 [D].西安:西安电子科技大学,2021.
[3] 胡成丰.车载毫米波雷达总体方案及信号处理关键技术研究 [D].西安:西安电子科技大学,2020.
[4] 徐耀东.基于FMCW的雷达测量技术在河道流量监测中的应用 [J].治淮,2023(7):35-37.
[5] 何进.车载毫米波雷达阵列天线设计与研究 [D].南京:南京林业学学,2024.
[6] 方超.车载毫米波雷达目标检测与跟踪算法研究 [D].成都:电子科技大学,2024.
[7] 邓凯,周建江,王佳宾,等.基于IOMP的毫米波雷达多目标检测算法 [J/OL].现代雷达2024:1-10[2024-05-15].http://kns.cnki.net/kcms/detail/32.1353.TN.20240425.1216.002.html.
[8] 陈文亮,王俊,袁常顺. 多毫米波雷达坐标标定方法 [C]//第十三届全国DSP应用技术学术会议论文集.杭州:[出版者不详],2021:4.
[9] 杨凡.多径效应中雷达反射模型的研究 [J].湖北理工学院学报,2016,32(5):28-32.
[10] 刘兆瑜.复杂环境车载毫米波雷达弱目标探测方法研究 [D].成都:电子科技大学,2023.