摘 要:文章简要描述了目前常见的巡检场景以及挂轨机器人巡检系统的应用场合,介绍了巡检系统在实际应用中一些功能,包括自主定位导航巡检、视频及环境检测、自主安全防护、语音对讲、自身状态检测等,然后介绍了基于挂轨机器人的智能巡检系统的设计,包括轨道、供电系统、机器人本体、通信系统、服务器系统、软件系统等,最后说明实物系统在新疆某厂房应用中取得了良好的巡检效果,为各行各业的机器人巡检提供参考和借鉴。
关键词:挂轨机器人;智能巡检;滑触线;载波通信;STM32F407;B/S架构
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2024)08-0060-05
DOI:10.19850/j.cnki.2096-4706.2024.08.014
0 引 言
目前生产和生活中输送带输送机巷道、煤矿井下水泵房、城市综合管廊、配电房、污水处理场、化工厂等场所的巡视和检修工作大部分都依靠人工进行定时检查、驻点值守,但人工巡检存在以下诸多缺点:环境复杂、空间狭小、积水情况常见,对人工巡视造成阻碍和干扰;容易受到个人经验和情绪、主观意识的影响;频率低,间隔长,设备发生故障不能及时被发现;设备运行过程中无法进行人工巡检作业;人工获取的数据难以形成系统性,参考意义不大;井下作业还威胁巡检人员的生命安全。
随着计算机性能的大幅提升以及通信技术、图像识别技术、红外测温技术的发展,机器人巡检代替人工巡检已逐渐成为设备巡检的发展方向。机器人巡检系统能让运维人员足不出户就可全景掌握设备的状态,减少巡检次数,降低日常维护的人员、车辆以及物资等维护成本,挖掘设备状态数据中的价值,提高管理水平[1]。巡检机器人按行走方式主要分为轨道式、轮式和履带式三种机器人[2]。挂轨机器人具有固定的运动轨迹,一般架设在高处不影响人员往来,还方便采用滑触线供电,24小时不间断工作提高巡检效率,本文主要介绍滑触线供电的挂轨机器人巡检系统进行设计和应用。
1 功能介绍
开发的机器人巡检系统主要有自主定位导航巡检、视频及环境检测、自主安全防护、语音对讲、自身状态检测等功能。
机器人采用传感器和软件计算结合场景轨道布置实现自然环境下的精准定位,能根据指定的路径和指定的巡检目标点进行自动匀速巡检,只需要设定巡检路径并启动自动巡检即可使机器人自动完成一次巡检。机器人每到一个巡检工作位置,能自动准确停车探测,做完规定的动作后再按照路径自动往下一个巡检目标点前进,全程无须人工干预,便可完成巡检作业,自动记录、保存、上传数据。
机器人利用自身携带各种环境传感器对现场被巡检设备和环境数据进行采集,然后将采集的数据进行分析,进而诊断出设备是否存在故障并触发相应报警。一般可用于设备指示灯、数字及指针表计、开关阀门等识别,也可用于跑冒滴漏的高变倍监控实现液体跑冒滴漏事件的实时监测。巡检任务执行完成后会自动生成任务报表,实现对现场设备及环境的高密度、高分辨率检测与多维度分析管理[3]。
机器人带有安全检测传感器对巡检区域以及周边进行探测,遇到障碍物会提前停止运行并报警。同时为了防止在传感器失效的情况下碰撞造成人员或者设备损伤,在机器人身体前后两端增加了缓冲部件和检测电路可有效减缓碰撞力度并从硬件上强行停止。在机器人明显位置安装有警示灯,通过警示灯的不同颜色来表示挂轨巡检机器人当前的各种状态,提醒巡检区域内工作人员注意。在自主巡检的过程中停障后会自动通知主控室排除障碍物,在此过程中可由后台客户端下达返回、待命或其他无影响的巡检任务。
巡检系统可通过搭建的网络在机器人端与后台主控室之间进行实时语音对讲,方便现场人员交流。
机器人具备自检功能,支持对位置、速度、里程、通信情况等的检测,实时监控自身状态并通过警示灯或后台客户端显示。
2 系统方案设计
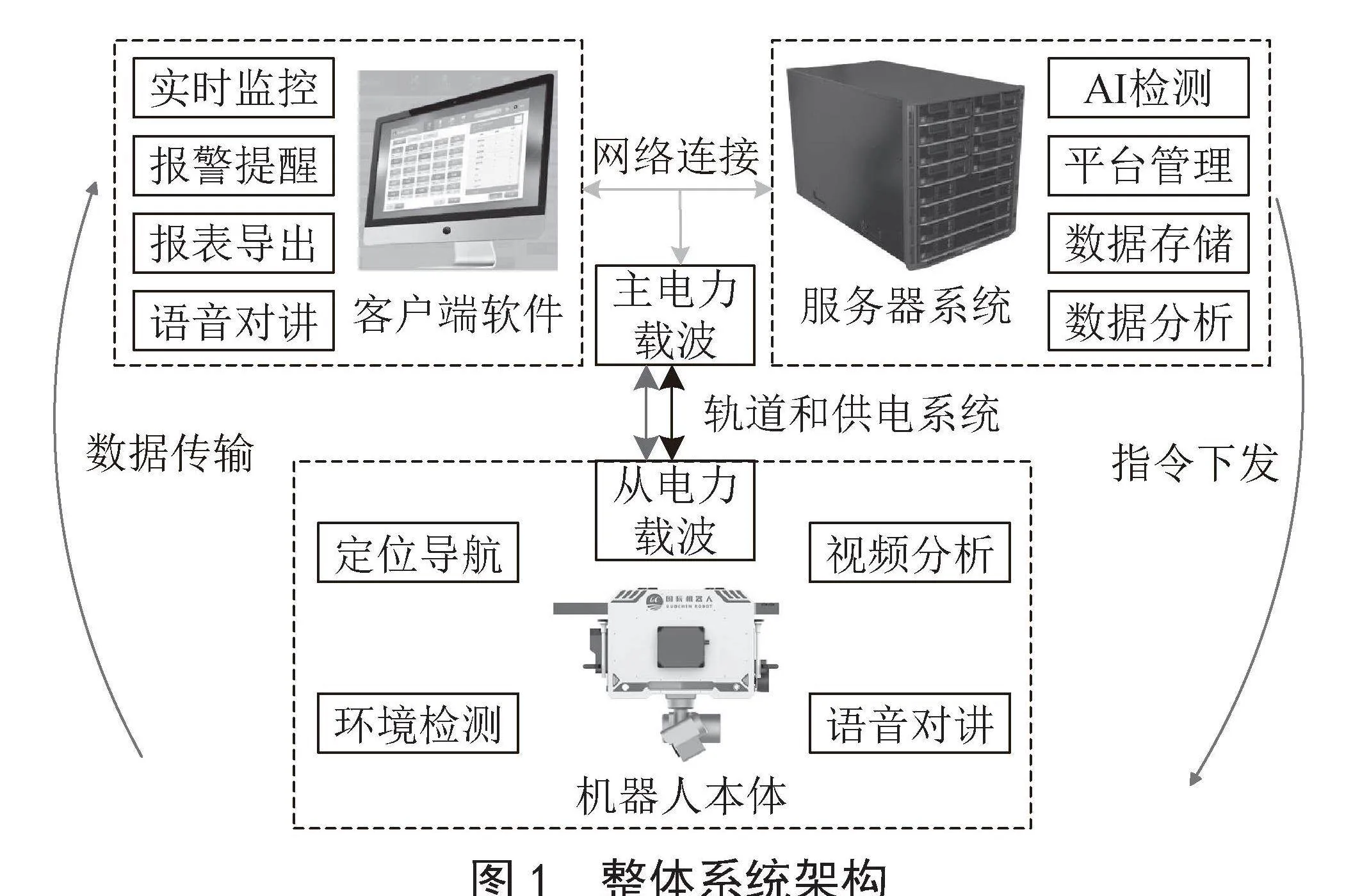
本系统包含多模块、多要素、多子系统,从数字化、信息化、智能化的要求出发,从更高维度、更全面视角设计,采用滑触线供电和电力载波通信的智能巡检系统。整体系统架构如图1所示,主要包含轨道和供电系统、机器人本体、通信系统、服务器系统、软件系统等。
2.1 轨道和供电系统
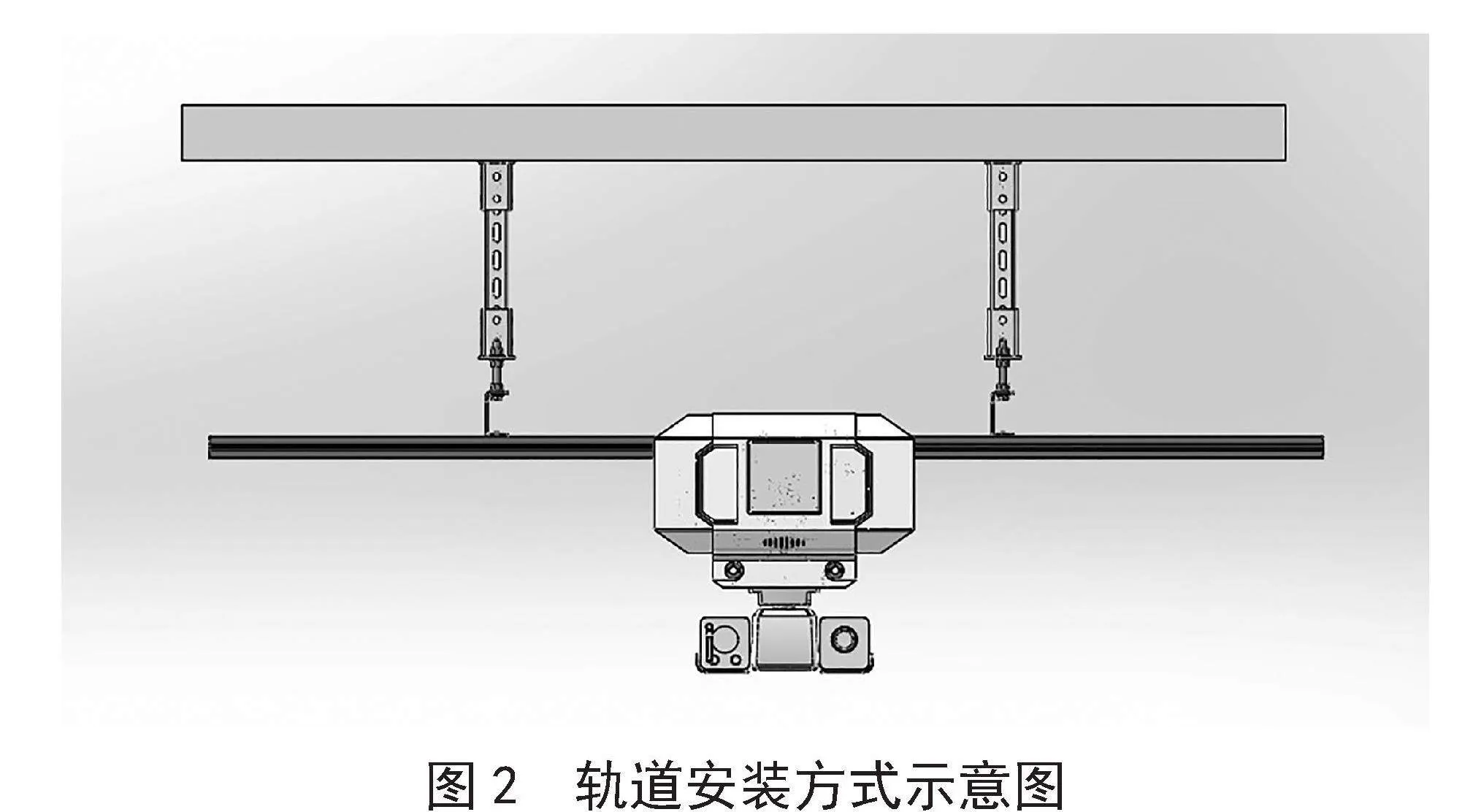
为满足挂轨机器人平滑顺畅行驶要求,轨道方案采用如图2形式,轨道固定支架通过拉爆螺丝固定于房顶,轨道采用高强度铝合金材料制作的直轨与弯轨拼接吊顶安装而成,通过调整可调节高度支架可保证轨道安装高度适宜且水平[4]。直轨道标准长度一般3 m或6 m,弯轨根据现场尺寸定制,每间隔1~2 m安装固定支架以保证机器人的支撑强度,机器人本体主动轮和从动轮架设于轨道上。
机器人要开展巡检工作,稳定的电源系统是各模块工作的前提,一般常用的供电方式有电池和滑触线两种[5],电池供电方式会增加机器人重量,不能长时间巡检需要设置充电装置间断性充电,巡检效率相对不高。本系统创新性的采用滑触线供电方式,其安装于轨道上方,初始端接入48 V开关电源对应正负极,并用集电器与滑触线紧密接触,集电器可以将滑触线中的电能通过滑动接触输送给机器人本体,这样机器人不仅重量轻,而且在巡检过程中可以保持7×24小时不间断工作。
2.2 机器人本体
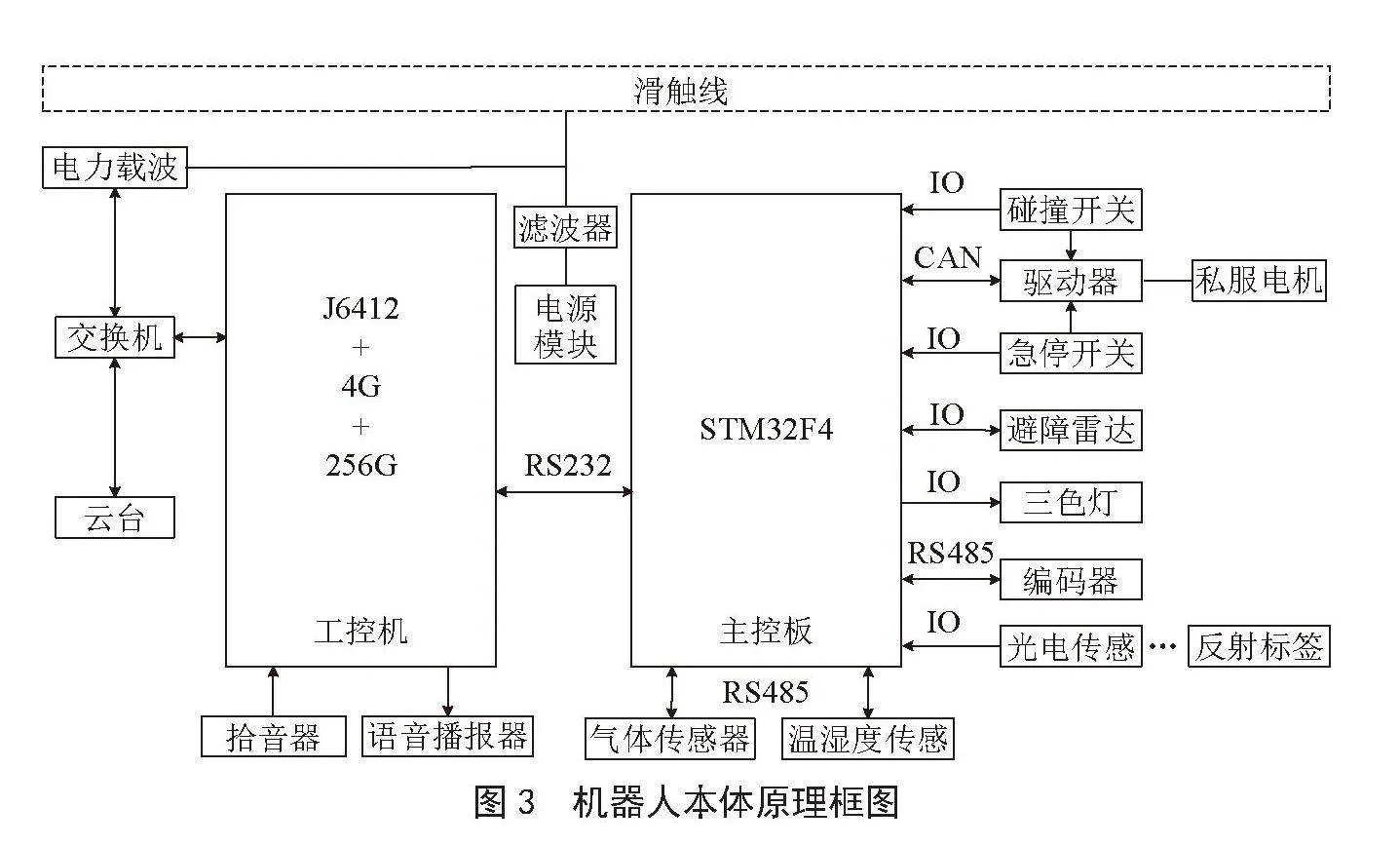
机器人本体设计是本系统的核心,主要由工控机、主控板、电机驱动系统、各种传感器、电源模块等组成,如图3所示。实现机器人运动控制、视频和传感器数据采集传输保存、安全防护、状态检测、语音对讲相关功能。
工控机选用研华的MIO-5152,它采用全新第八代Atom Elkhart Lake平台3.5嵌入式单板电脑,采用DDR4内存,整板尺寸小巧,TDP功耗6~10 W,可支持6COM、6USB、2LAN、HDMI等接口,带有4K/8K ESD防护,具有高性价比、性能强、接口丰富、可靠性高等特点,在本系统中分别与电力载波、云台通过交换机相连,与主控板则采用RS232通信,主要负责视频、语音、传感器、机器人状态等数据采集处理传输保存等。
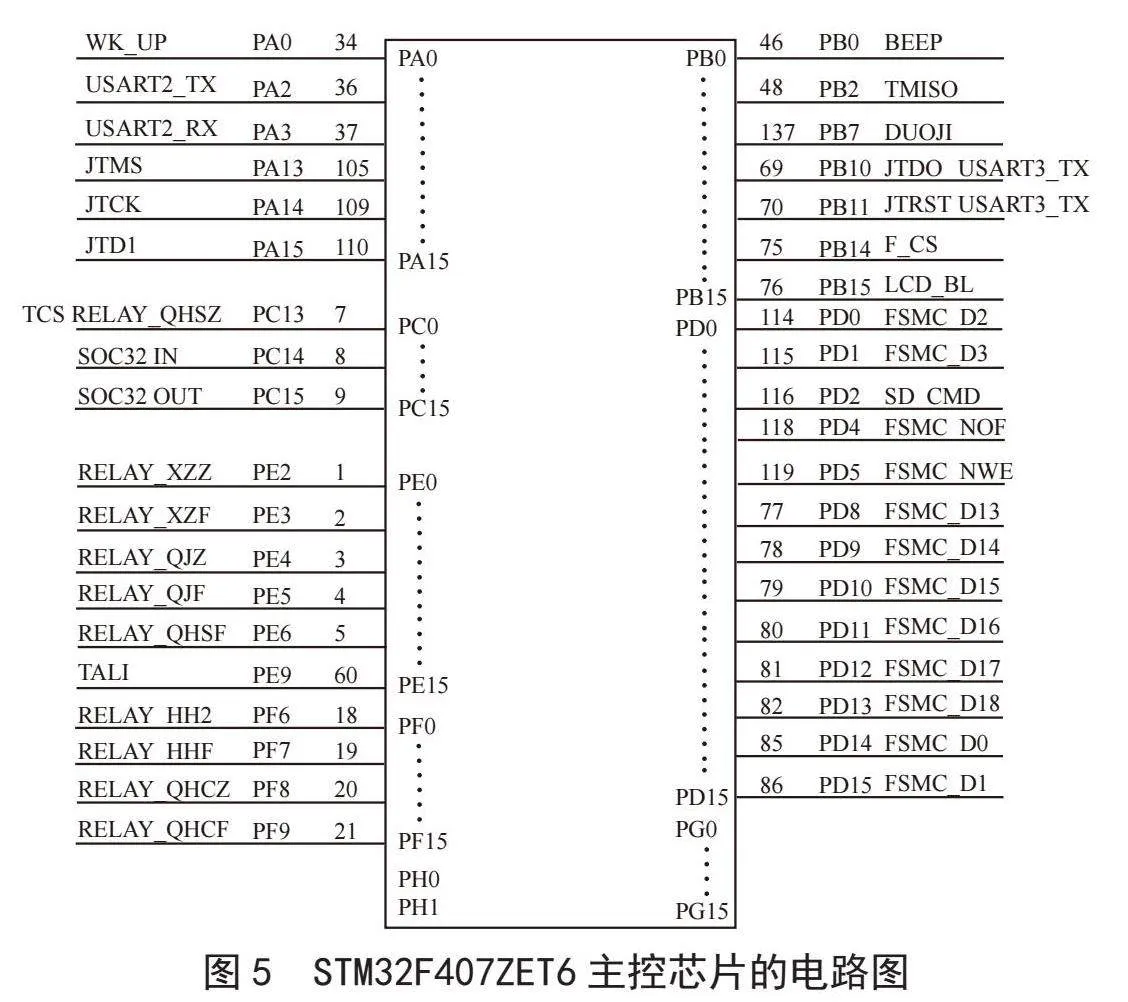
运动控制、传感器数据采集和机器人状态检测显示相关功能以STM32F407微处理器(MCU)为核心分别与各子模块相连,它是带有DSP和FPU指令的高性能微控制器,基于Cortex-M4内核,最高频率可达168 MHz,从Flash存储器执行时能够提供210 DMIPS/566 Core Mark性能。其中自主定位采用获取编码器数据并计算实时运行里程结合光电传感器矫正的方式来实现,编码器采用进口传感器安装在驱动轮连接位置,MCU通过RS485通信获得机器人运行的实时距离信息,同时在轨道上标志位置贴上长条形不同编码区域的反光标签,一般直道间隔8 m内,距离弯道0.1~0.5 m范围内,轨道尽头1 m内都贴有标签,当机器人携带光电传感器到标签附近时传感器自身发射的红外光经反射光强度变强可以感应到对应的IO脉冲信号被MCU检测到并确定对应标识位置信息,该位置可作为机器人巡检点或辅助位置信息矫正点。机器人的运动采用低压私服系统来实现,包括驱动器、电机、制动电阻等,驱动器具有PID调节功能,MCU通过CAN通信下发速度使机器人可稳定加减速和匀速运行在轨道上到达预定的目标位置[6]。本系统加装的传感器可根据不同场景配置,常规的有温湿度传感器、气体传感器、噪音传感器等,一般采用RS485通信实时上报传感器检测状态,一旦超出上下限数值就会使得机器人三色灯变相应灯颜色,同时语音播报器也会播报相应警告语。另外,机器人还具有自身检测功能,主要包括位置、速度、里程各状态信息以及各模块之间相互通信校验,如果状态或通信异常机器人也能及时发现并停止运行提醒管理人员检修。
对于整个系统来讲机器人的安全防护是至关重要的一环,本系统采用多重安全防护措施,包括避障雷达、碰撞开关、急停开关等[7]。选用的避障雷达探测距离可达20 m,感应视角270°,采用2D平面红外不可见激光束在单个平面上扫描周围区域,其利用飞行时间原理测量距离,激光雷达以均匀和极短的时间间隔发射激光脉冲,当激光遇到障碍物时会反射回来,激光雷达接收到反射回来的光信号,根据发射与接收之间的时间差以及光速可计算得到物体与激光雷达之间的距离信息,雷达在检测到有效障碍物时输出高低电平信号以被MCU检测到采取相应措施。值得一提的是雷达可以根据输入IO信号设置16个不同区域,这样可以在不同区域设置不同触发距离,从而实现机器人应付复杂环境的避障功能。输出3个IO信号对应3个防护级别分别对应远端预警、正常停止、急停停止,可使机器人提前预判调整运动轨迹,区域设置输入信号和防护检测输出信号分别连接MCU的IO脚可实现。为了防止避障激光雷达失效,在机器人前后方向都装有碰撞开关,当碰撞开关触发后,内部开关闭合,该信号可切断驱动器输出使得机器人失去动力,同时接入主控板,使系统知道碰撞开关触发状态。急停开关也具有相同功能,在其他控制无效的情况下可人为切断机器人动力系统。
电源模块也是极为重要的,它为机器人本体所有设备提供了稳定可靠的电源。因为滑触线上为48 V左右直流电,采用两个DCDC电源模块将48 V电压转化为24 V和12 V以供工控机、主控板、传感器等设备工作,经计算功率都取50 W,而驱动器是宽电压20~70 V工作,即使滑触线电压有所波动也在其工作范围内,所以直接输入即可。
2.3 通信系统
目前,巡检机器人常用的通信方式有Wi-Fi、移动网络和电力载波等。Wi-Fi布局要求工程一开始就把所有布线完成,否则需要重新开槽、打墙,走线成本将非常高,且存在着传输不稳定、数据延时大、时常掉线连接的问题。移动网络一般只有在空旷的环境信号才好,在室内或者偏僻地方需要通信运营商重新布置基站也需要额外花费不少成本。电力载波通信可以利用现有电力线,不需要重新架设网络,信号稳定、高传输速率、抗干扰性强、免布线烦恼、即插即用。应用电力载波通信技术,进行音视频、控制指令和系统状态等信息的传输,可以做到整个通信过程的准确无误,相比于其他两种通信方式,简化了布线,并大大降低了组网成本[8]。
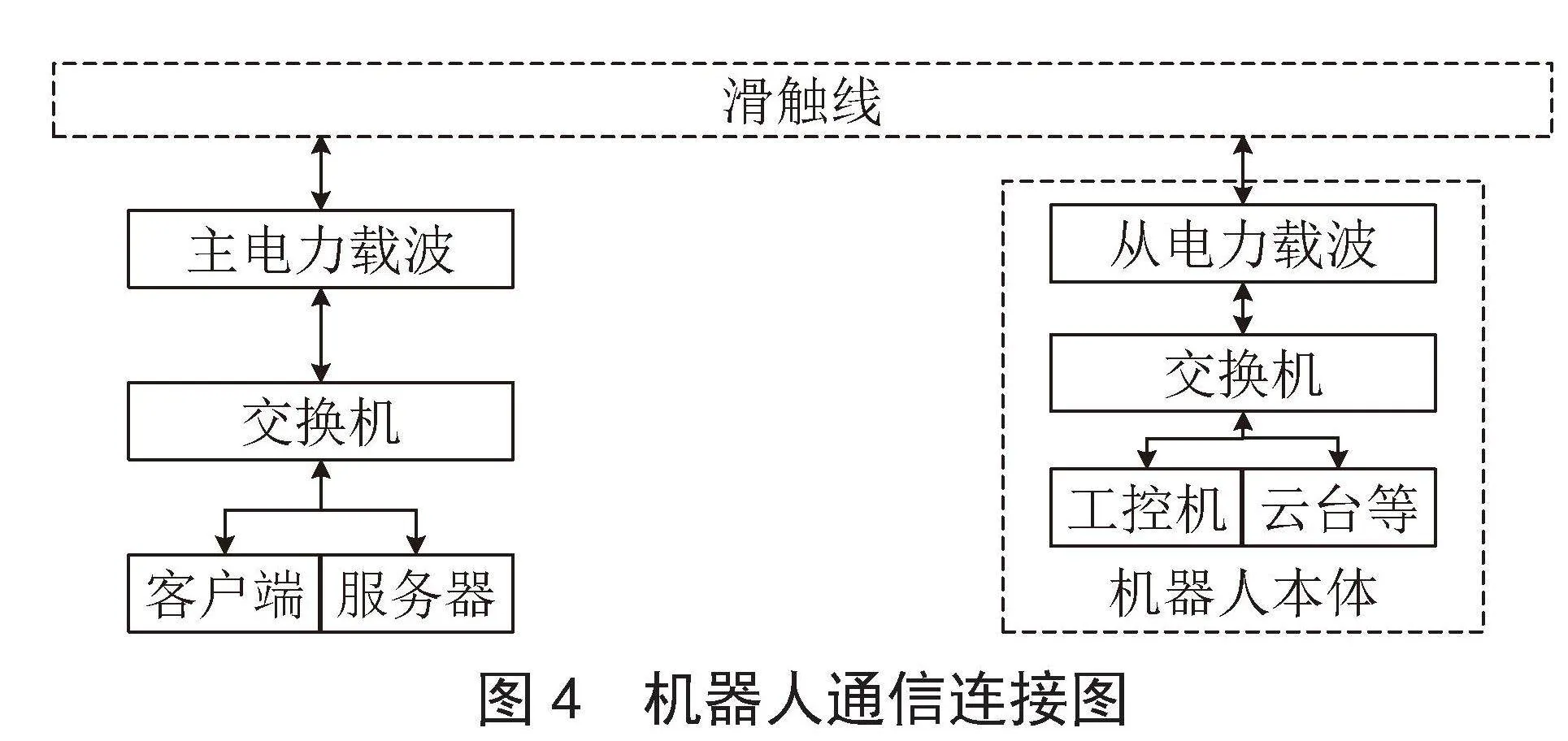
得益于系统采用滑触线方式供电,利用其搭载电力载波模块实现机器人与后端的通信,服务器和客户端则采用交换机与之相连,不过需要说明的是电力载波通信方式点对点最远传输距离一般在500 m以内,更远距离的通信则需要采用带中继功能的载波模块,通信连接关系如图4所示。
因为电力线上机器人本体带有各种负载,比如稳压电源、电容器、电机感性负载等,这些会对电力载波的高频信号产生较大的吸收作用。为了避免电力载波性能的下降,以达到理想的电力载波效果,在电力线上串接了专用的二级电源滤波器,分别加在主电力载波模块的前端和从电力载波模块的后端,对干扰源进行滤波隔离以达到更好的通信效果。
2.4 服务器系统
本系统涉及各种数据检测、远程控制、数据存储及支持多机器人监控等功能,考虑到后续的机器人系统增加、接入检测设备的增加、算法的不断提升,特建立服务器系统[9],该方案可实现一台服务器包含多种功能:
1)高并发高可靠、多用户、多业务、强交互的机器人一体化管理平台,提供机器人及其他接入设备的全生命周期管理。
2)提供网络管理、用户管理、机器人管理、地图管理、任务管理、报警管理。
3)AI和实时数据管理、历史数据、调试管理、音视频管理、交互管理、阈值管理、自定义事件等功能模块。
2.5 软件系统
巡检系统配备有专门的远程控制后台管理软件,机器人客户端采用B/S架构,将控制系统功能的实现集中在服务端上,通过浏览器对机器人进行操控实现跨平台统一的用户交互[10]。机器人的视频、数据、报警、控制等融合于智能巡检运维平台一体化管理,界面显示内容可编辑,客户端软件界面具备机器人各种数据显示、参数设置、机器人控制等功能,对机器人的实时坐标进行动态更新和显示。
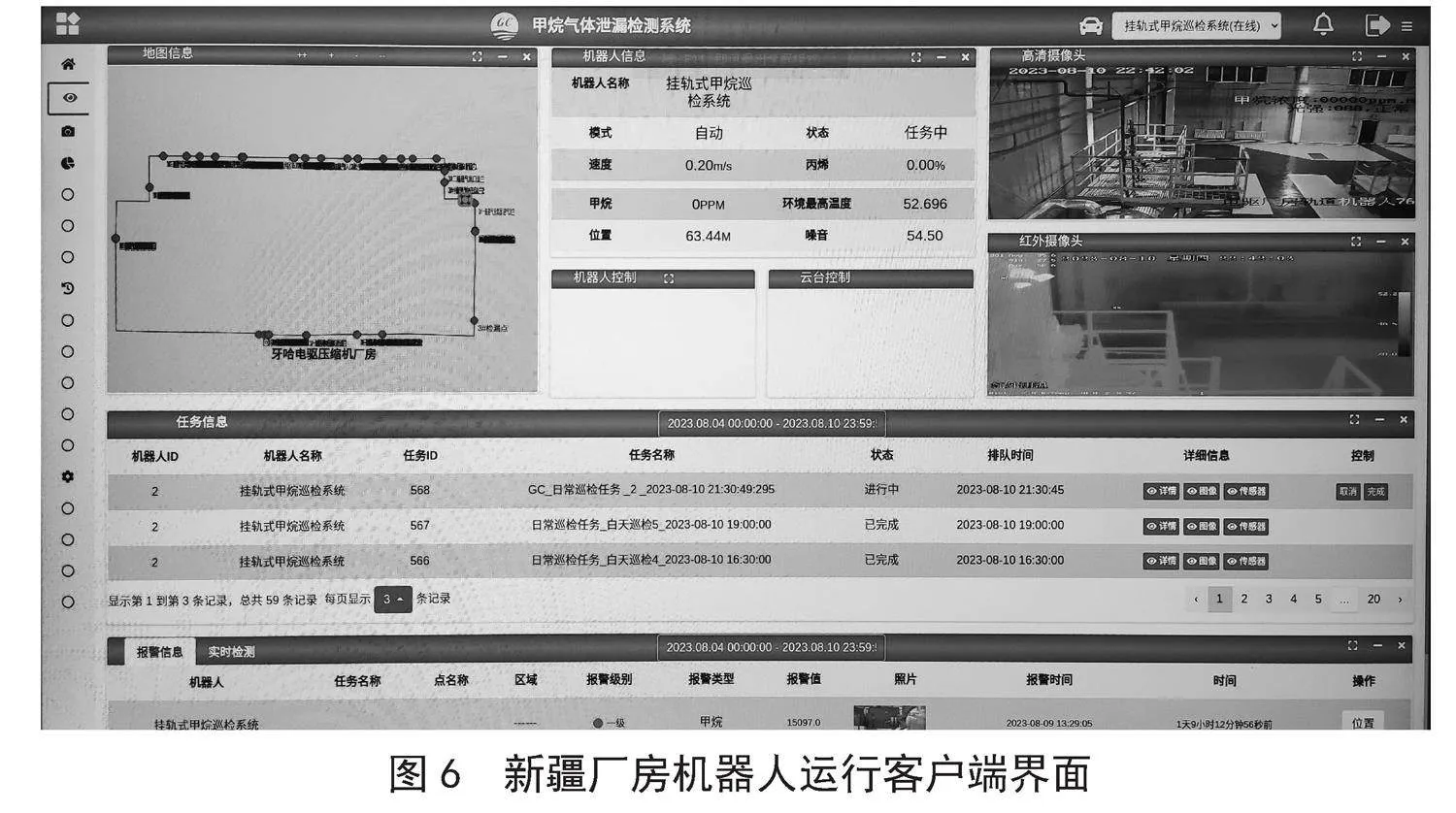
3 应用实例
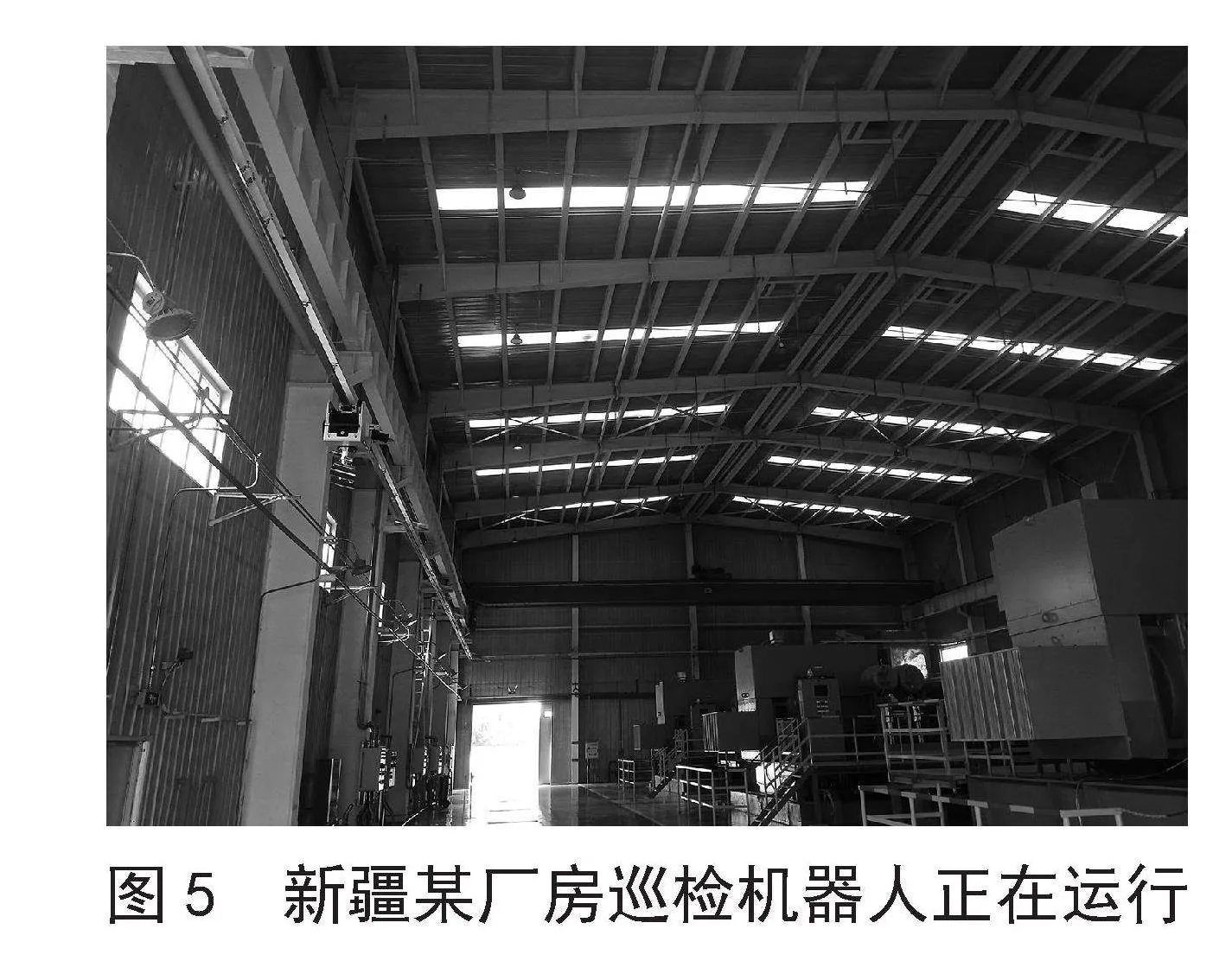
基于本系统技术的挂轨机器人巡检系统已应用于隧道作业检测、污水处理厂巡检、石油化工厂巡检等场景,图5、图6为新疆某厂房设备阀门开关等识别和环境气体监测运行现场和客户端管理画面。目前已连续稳定工作几个月,从客户端可以清晰看到实时高清和红外画面并成功识别设备动作状态,可以实时显示现场气体浓度、环境温度、噪音值等传感器数值和机器人速度、位置等状态,高效完成了预定的巡检任务,且数据可追述便于管理,给客户节省了大量人力成本。
4 结 论
综上,基于挂轨机器人的巡检系统方案稳定可靠,切实代替人解决了一些需要巡检的工作任务,并且可以7×24小时不间断工作。随着劳动力的紧缺,以及人工智能、物联网、大数据等技术的大力发展,该系统在人们日常生产生活中将发挥越来越重要的作用。
参考文献:
[1] 王天野.室内轨道巡检与作业机器人控制系统设计与开发 [D].南京:南京理工大学,2019.
[2] 李祥,崔昊杨,曾俊冬,等.变电站智能机器人及其研究展望 [J].上海电力学院学报,2017,33(1):15-19.
[3] 蔡兆祝.基于两栖机器人的雨污管道自动化巡检技术研究 [D].杭州:浙江大学,2021.
[4] 李新海,徐宝军,肖星,等.变电站挂轨机器人智能巡检系统技术研究[J].电气传动,2021,51(19):43-49.
[5] 刘永成,马孝林,孙昊,等.移动机器人智能取电技术研究 [J].信息技术与信息化,2021(9):217-219.
[6] 胡楠,张吉沐阳,郭键,等.配电房轨道式自动巡检机器人控制系统设计与实现 [J].计算机测量与控制,2016,24(3):95-98+102.
[7] 石金进,朱成龙.移动机器人安全性研究综述 [J].青岛理工大学学报,2022,43(3):151-156.
[8] 俞海猛,隋仕伟,刘梦爽,等.基于电力载波通信技术的智能小区抄表系统 [J].计算机测量与控制,2022,30(11):251-256+278.
[9] 胡肸.轨道摄像机器人服务器系统设计与实现 [D].南京:南京理工大学,2017.
[10] 李征.基于B/S结构的水下机器人远程控制的设计 [J].工业设计,2016(5):144-145.
作者简介:吴张勇(1988.09—),男,汉族,浙江诸暨人,工程师,本科,研究方向:电子信息技术。
收稿日期:2023-09-08
Research on Intelligent Inspection System Based on Rail Hanging Robot
WU Zhangyong, JI Shubao
(Hangzhou Guochen Robot Technology Co., Ltd., Hangzhou 311200, China)
Abstract: This paper briefly describes the current common inspection scenarios and the application scenarios of the rail hanging robot inspection system. It introduces some functions of the inspection system in practical applications, including autonomous positioning and navigation inspection, video and environmental detection, autonomous safety protection, voice intercom, self-state detection, etc. Then, it introduces the design of an intelligent inspection system based on the rail hanging robot, including the track, power supply system, robot body, communication system, server system, software system, etc. Finally, it shows that the physical system has achieved good inspection results in a factory in Xinjiang, providing reference for robot inspection in various industries.
Keywords: rail hanging robot; intelligent inspection; sliding contact line; carrier communication; STM32F407; B/S architecture