
摘" 要:为评估雷达在受欺骗干扰下的工作性能,提升其抗干扰能力,研究了假目标干扰、距离拖引干扰和速度拖引干扰三种欺骗干扰的原理,并基于SystemVue平台搭建了仿真系统。干扰机根据雷达发射信号生成干扰信号,与目标回波信号叠加后进入雷达信号处理系统,通过对信号处理输出的仿真结果进行对比分析,可以验证对雷达干扰的有效性。仿真对于雷达抗干扰能力的提升具有参考意义,且可根据实际需求搭建更贴近现实场景和参数的仿真系统。与此同时,体现了SystemVue平台模块化、数字化的直观便捷和强大的射频仿真能力。
关键词:雷达干扰;欺骗干扰;SystemVue
中图分类号:TN955" " " 文献标识码:A" " " 文章编号:2096-4706(2024)18-0016-05
Simulation Research on Several Radar Deception Jamming Modes
LIU Zhenyang
(Nanjing Research Institute of Electronics Technology, Nanjing" 210039, China)
Abstract: To evaluate the work performance of radar under Deception Jamming and improve its anti-jamming ability, the principles of three kinds of Deception Jamming, 1 target jamming, range pull-off jamming and velocity pull-off jamming are studied, and a simulation system is built based on SystemVue platform. The jamming signal is generated according to the transmitted signal of radar, and then superimposed with the target echo to enter the radar signal processing system. By comparing and analyzing the simulation results of signal processing output, the effectiveness of radar jamming can be verified. The simulation has reference significance for the improvement of radar anti-jamming capability, and can build a simulation system closer to real scenes and parameters according to actual needs. At the same time, it reflects the modularity, digital intuitive convenience of SystemVue platform and powerful RF simulation capability.
Keywords: radar jamming; Deception Jamming; SystemVue
0" 引" 言
雷达作为战场上重要传感器,工作状态的好坏时刻影响着战场上每一个重要决策。因此,针对雷达设计的电子战系统功能也日益强大,新型干扰模式层出不穷。雷达所受干扰可根据产生方式、作用方式等差异进行分类,例如按照干扰是由干扰机产生还是反射雷达信号可分为有源干扰和无源干扰;按照干扰信号对雷达接收机的作用方式及干扰信号形式、带宽等差异,可分为压制干扰和欺骗干扰。其中欺骗干扰的原理是干扰机接收雷达发射的脉冲信号,然后识别和存储雷达波形参数信息,通过调制产生与原始信号高度相似,但是带有虚假目标信息的干扰信号返回发送给雷达接收端,若雷达的目标检测和跟踪系统不能判断所接收信号是否真实,就会导致雷达无法正确检出目标参数信息,甚至丢失目标[1]。
通常雷达可以直接检测到的目标参数信息主要包括四种,即目标距离、速度、方位角和俯仰角。针对这几种信息进行欺骗,有距离欺骗干扰、速度欺骗干扰、角度欺骗干扰及假目标干扰等。其中距离欺骗、速度欺骗和假目标欺骗较容易实现,角度欺骗对干扰机的参数容限则比较苛刻,如针对单脉冲雷达测角的交叉眼干扰等[2]。
本文介绍三种常见的三种有源欺骗干扰信号:假目标干扰、距离拖引干扰和速度拖引干扰。首先分析其作用原理,然后使用仿真软件进行建模和仿真。该仿真可为雷达干扰识别做参考,为抗干扰措施开发打基础。
1" 相关知识
欺骗干扰信号可使用数字射频存储技术(DRFM)产生,其主要原理是把接收到的雷达射频信号下变频为中频信号,经过A/D变换为数字信号并存储。等需要对雷达进行干扰时,提取数字信号,经过调制及D/A变换为模拟信号,再通过干扰机天线辐射出去。DRFM技术可将信号在时域上进行延迟,在频域上进行多普勒频移。将接收的雷达信号延时和移频处理之后再发射就会分别对雷达形成距离和速度欺骗干扰,若是通过对存储到的信号进行多次延时转发,就会形成多假目标干扰效果[3]。
1.1" 假目标干扰
假目标干扰是干扰机对截获信号的调制导致其携带的目标参数发生改变,产生假目标的干扰效果[4]。
多假目标干扰可看作单假目标的扩展,本文介绍和仿真产生一个假目标的原理和模型。多假目标就是根据所需要的假目标个数和距离来控制不同的转发次数及时延。
设Rf为假目标所在的距离,则假目标的时延为:
其中c为光的传播速度。若假目标距离与真实目标距离大于雷达距离分辨率且幅度合适,则雷达接收并进行信号处理后会将此假目标视为真目标上报显示。假目标时延由干扰机转发的时延∆tf和雷达-干扰机间距Rj造成的传播延迟tj组成:
干扰机无法确定传播延时tj,所以主要是通过控制转发延时∆tf来控制假目标的距离。将假目标的控制在比较理想的位置,确保与真实目标不混叠,从而对雷达造成干扰。通常情况下,假目标干扰多用于目标的自卫,因为进行延时控制相对容易,所以假目标通常在真实目标之后。
1.2" 距离拖引干扰
距离门拖引是针对雷达自动距离跟踪系统的主要欺骗样式,干扰机使用该方式把雷达跟踪波门从真实目标逐渐诱骗到其产生的假目标上,从而达到破坏或阻碍雷达正常探测目标的目的。距离拖引干扰可以分为距离门前拖(Range Gate Pull In, RGPI)干扰和距离门后拖(Range Gate Pull Off, RGPO)干扰,其中后者因更容易实现而成为最常用的距离拖引干扰形式[5],本文仿真对象即为距离门后拖干扰。RGPO本质上也是一种延时转发的干扰,但其干扰实现过程与假目标干扰有所差异,其作用原理如下:
1)干扰脉冲捕获距离门。干扰机截获雷达发射的脉冲后,以尽可能小的延时转发一个干扰脉冲,由于可能受到距离分辨率等因素影响,干扰信号可能覆盖真实目标的回波,或者当雷达处于单目标跟踪的工作模式时,雷达可能只跟踪幅度较大的信号。若干扰幅度大于回波信号幅度,一般幅度比为1.3~1.5时,干扰信号与真实目标回波相比具有更大的信噪比和检测概率,这样雷达就更容易跟上干扰信号,即捕获距离波门。一段时间内,为了防止雷达识别出假目标,干扰脉冲与目标回波脉冲在时间上基本重合,这段时间通常称为停拖时间。
2)距离门拖引。雷达跟踪上干扰脉冲后,干扰机转发脉冲延迟时间应逐渐增加。雷达距离跟踪波门随干扰脉冲移动而逐渐远离真实目标回波,拖引时间可以根据不同雷达在一定范围内调整。需要注意拖引速度(加速度)要小于距离波门所允许的最大跟踪速度(加速度),否则会造成拖引失败。
3)干扰机关机。当干扰信号把距离门拖离到足够大的距离门宽以后,干扰机停止转发信号。这时在跟踪距离门内没有了干扰脉冲和目标回波,导致雷达丢失跟踪的对象,只得重新进入搜索方式[6]。重复以上步骤可造成雷达无法稳定跟踪目标。
以上三个阶段,假目标的距离函数可表示如下:
式中,R为干扰释放时刻雷达和目标之间的距离;v1为雷达与目标的相对速度;v2为假目标与目标的相对速度。
1.3" 速度拖引干扰
速度欺骗干扰采用速度拖引(Velocity Gate Pull Off, VGPO)手段,使雷达错误地跟踪上多普勒频率逐渐远离真实目标的干扰信号,从而丢失目标,达到阻碍雷达稳定跟踪真实目标的目的。干扰信号功率一般大于目标回波功率,使得雷达的速度跟踪系统更容易跟踪上干扰信号[7]。
速度拖引的干扰信号为:
其中Aj为干扰信号的幅度,ωc为雷达的载频,ωd为多普勒频率,R(t)为目标的真实距离,∆ω为拖引信号相对于真实目标的频率偏差,c为光速。
速度拖引过程如下:
1)干扰信号捕获频率门。干扰机接收雷达发射的脉冲信号,识别存储雷达波形的参数信息,根据目标速度产生和调制干扰信号并转发回雷达。雷达接收到的干扰信号的多普勒频移与目标回波的多普勒频移一致,干扰信号幅度略大于目标回波幅度,当雷达处于单目标跟踪工作方式时,会因为干扰信号的较大信噪比,更容易捕获频率门。此阶段将维持一段时间,目的是使雷达稳定地跟踪上干扰信号。
2)频率门拖引。在此阶段,干扰机控制干扰信号多普勒频移逐渐增大,反映到速度上就是雷达与干扰机之间的径向速度越来越大,雷达的速度跟踪波门将跟随干扰信号的多普勒频移,逐渐远离目标的多普勒频率。
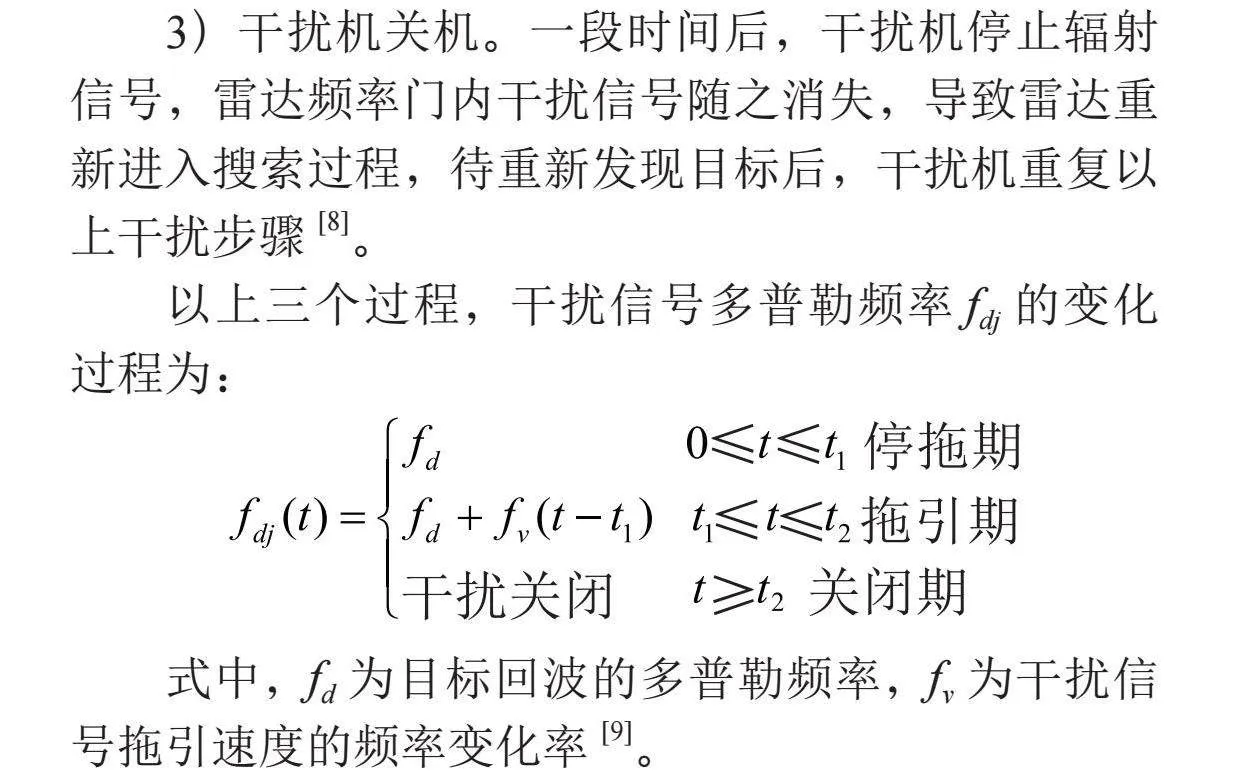
3)干扰机关机。一段时间后,干扰机停止辐射信号,雷达频率门内干扰信号随之消失,导致雷达重新进入搜索过程,待重新发现目标后,干扰机重复以上干扰步骤[8]。
以上三个过程,干扰信号多普勒频率fdj的变化过程为:
式中,fd为目标回波的多普勒频率,fv为干扰信号拖引速度的频率变化率[9]。
2" 模型搭建
SystemVue是Keysight公司研发的系统级仿真软件,主要用于雷达、通信、电子战等领域的数字级仿真实验,其模块化、系统化的设计思想顺应了现代雷达电子战装备发展的趋势[10]。
本章采用SystemVue软件搭建一个雷达干扰仿真平台模拟以上三种欺骗干扰形式。仿真模型的系统框图如图1所示。
2.1" 雷达信号产生和接收
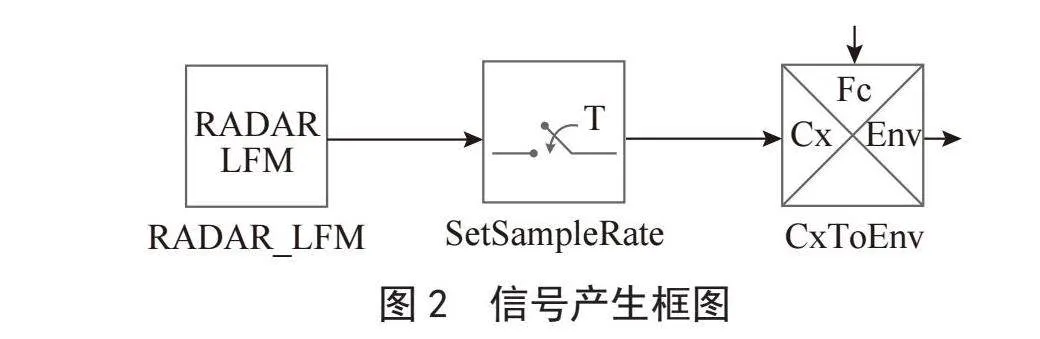
雷达发射信号为线性调频信号(LFM)如图2所示,调制到10 GHz的载频上,输出给目标回波产生模块和干扰信号产生模块。接收部分的“回波接收”模块是使用固定宽度的录取波门接收目标回波和干扰机的混合信号。
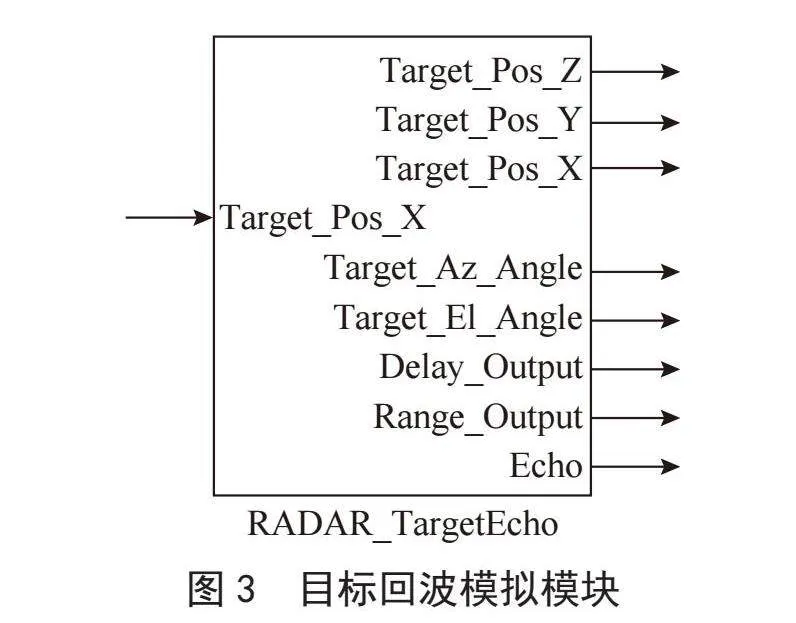
2.2" 目标回波产生
该部分是对运动目标的回波进行模拟如图3所示,该模块根据雷达信号产生部分输出的脉冲信号和模块内设置的参数模拟出目标回波信号,主要参数包括初始距离、初始速度、目标数量、RCS等。
2.3" 干扰信号产生
干扰信号可使用SystemVue内置的RADAR_EWJamming模块产生,可设置干扰方式和干扰参数等信息。干扰方式包括压制干扰和欺骗干扰,干扰参数包括假目标数量,干扰信号距离、速度及干扰信号的增益等。
2.4" 雷达信号处理
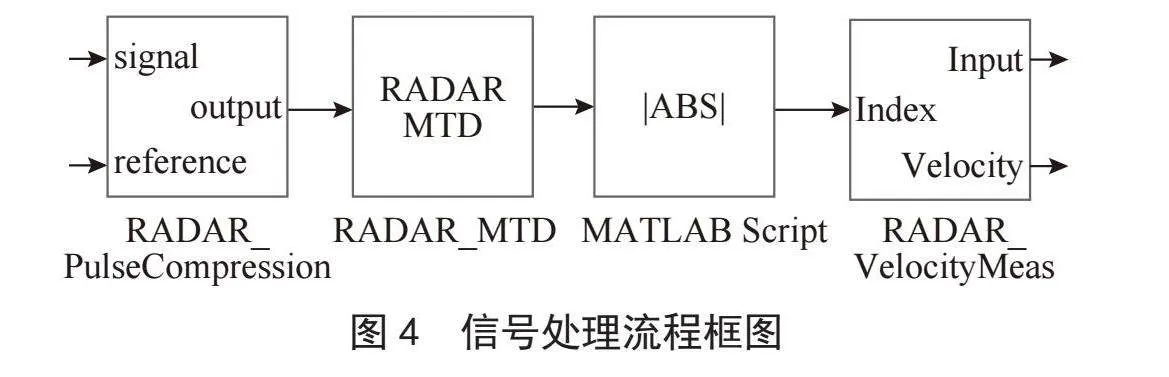
雷达信号处理流程如图4所示,信号处理部分主要是对回波和干扰的混合信号进行录取、脉冲压缩、MTD等,根据脉冲压缩和MTD的输出结果可判断干扰机的干扰效果。
3" 模型仿真
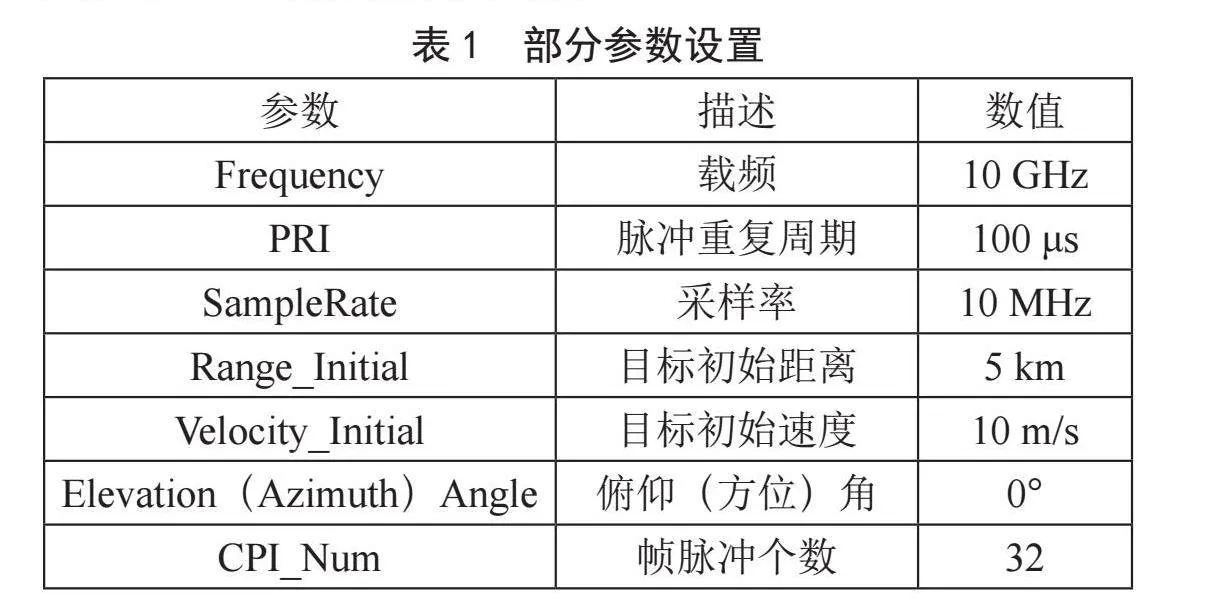
使用上述的模型可进行欺骗干扰下不同干扰样式的效果进行仿真,主要为假目标干扰、距离拖引干扰和速度拖引干扰。该模型仿真需设置各种参数,表1列出了一些较重要的参数。
3.1" 假目标干扰仿真
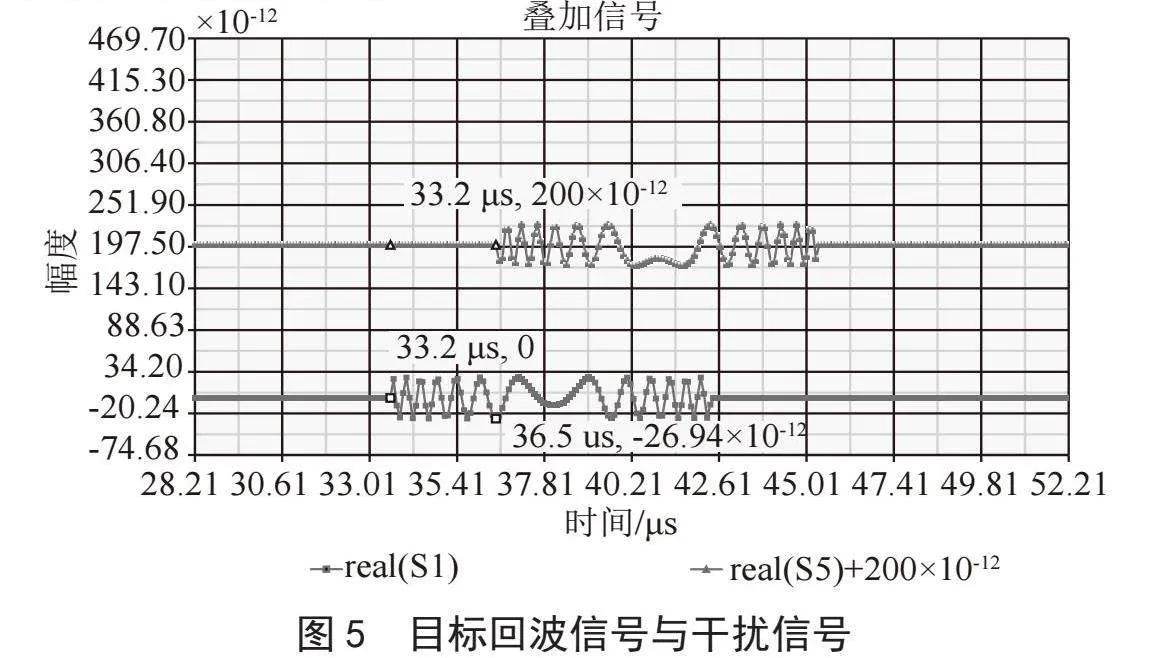
在目标回波模块中设置目标初始距离为5 km,在干扰信号产生模块中设置干扰模式为欺骗干扰,欺骗干扰样式设置为假目标干扰,假目标个数为1,干扰距离延后500 m,增益为1。
目标回波信号和干扰信号如图5所示,其中下方曲线为目标回波信号,时延约33.2 μs,对应距离约为5 km,上方曲线为干扰信号,时延约36.5 μs,对应距离为5.5 km。
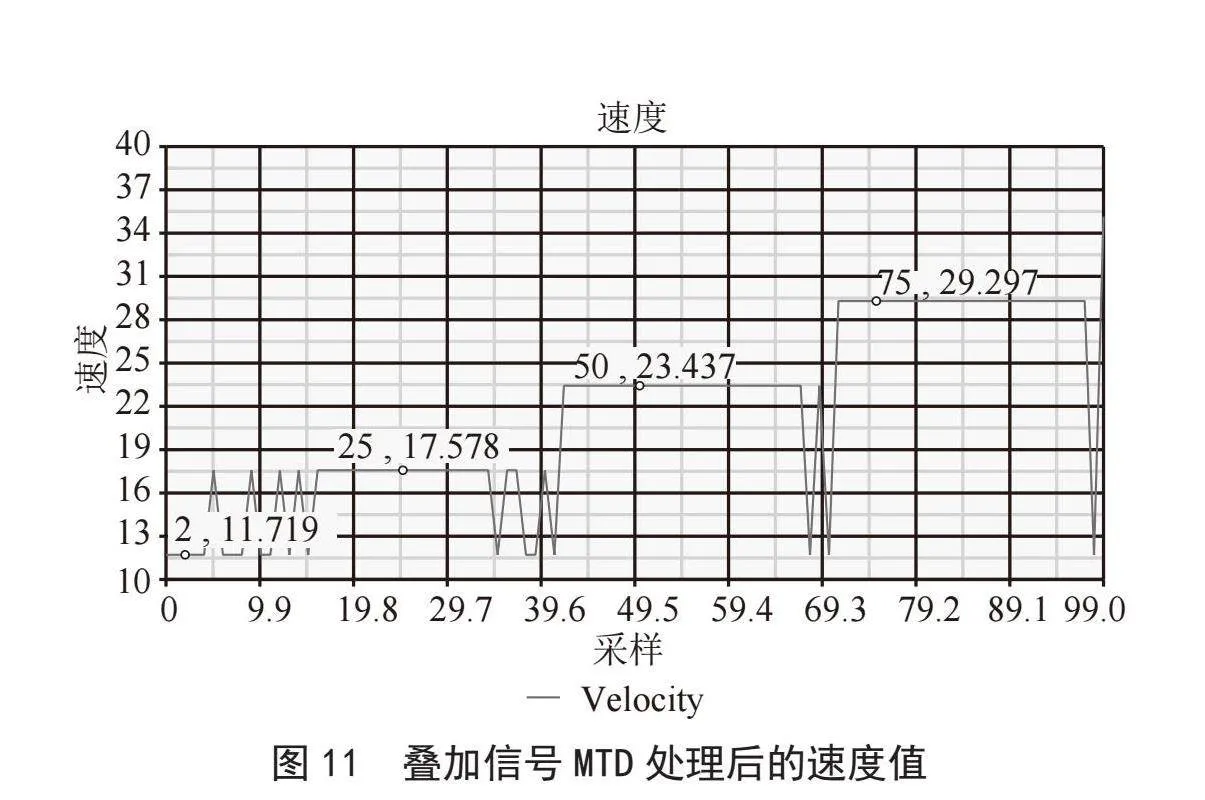
图6为回波信号和干扰信号叠加后进行脉冲压缩后的结果,横坐标为采样数,采样率10 MHz,可看到出现的两个尖峰分别为目标和干扰信号。
3.2" 距离拖引干扰仿真
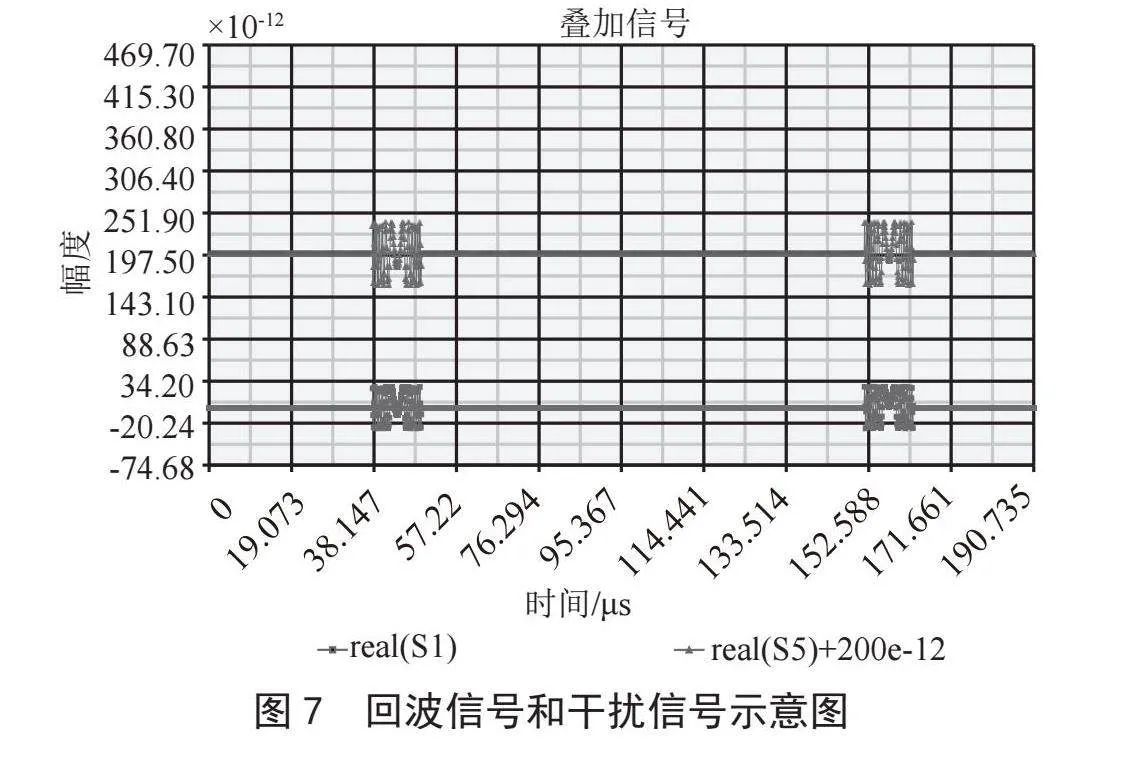
目标回波模块参数设置不变,在干扰信号产生模块中设置欺骗干扰样式为距离拖引干扰,信号增益设置为1.5,拖引速度为5 m/s。图7为回波信号和干扰信号的示意图,其中下方曲线为回波信号,上方曲线为干扰信号。
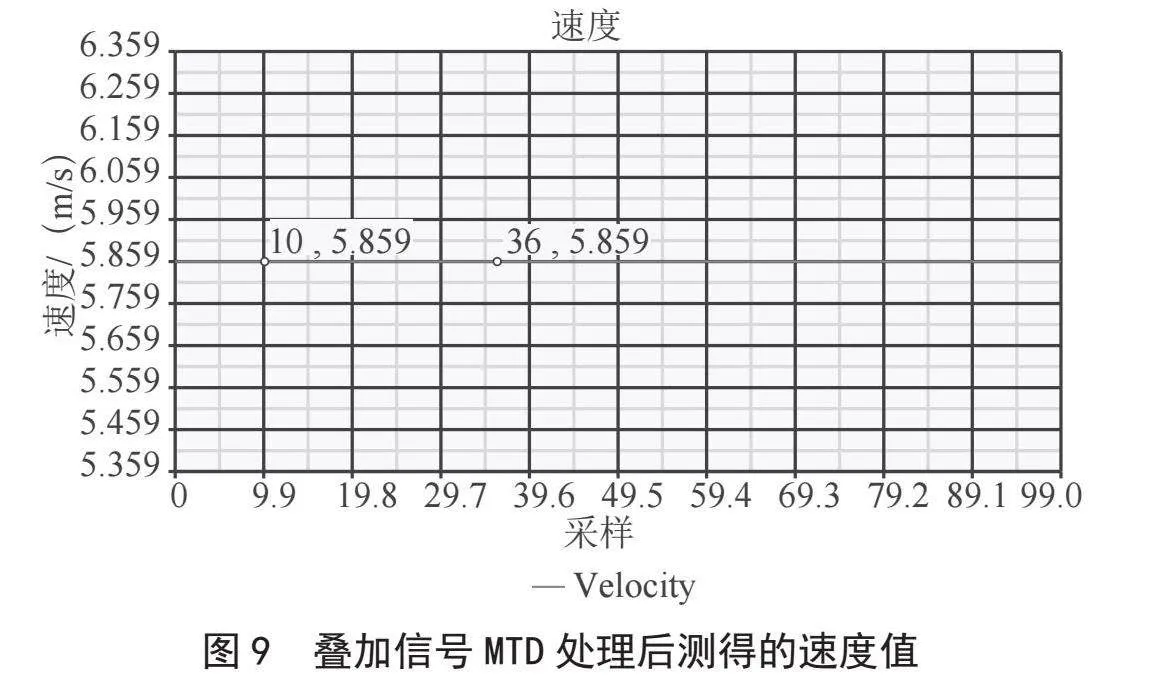
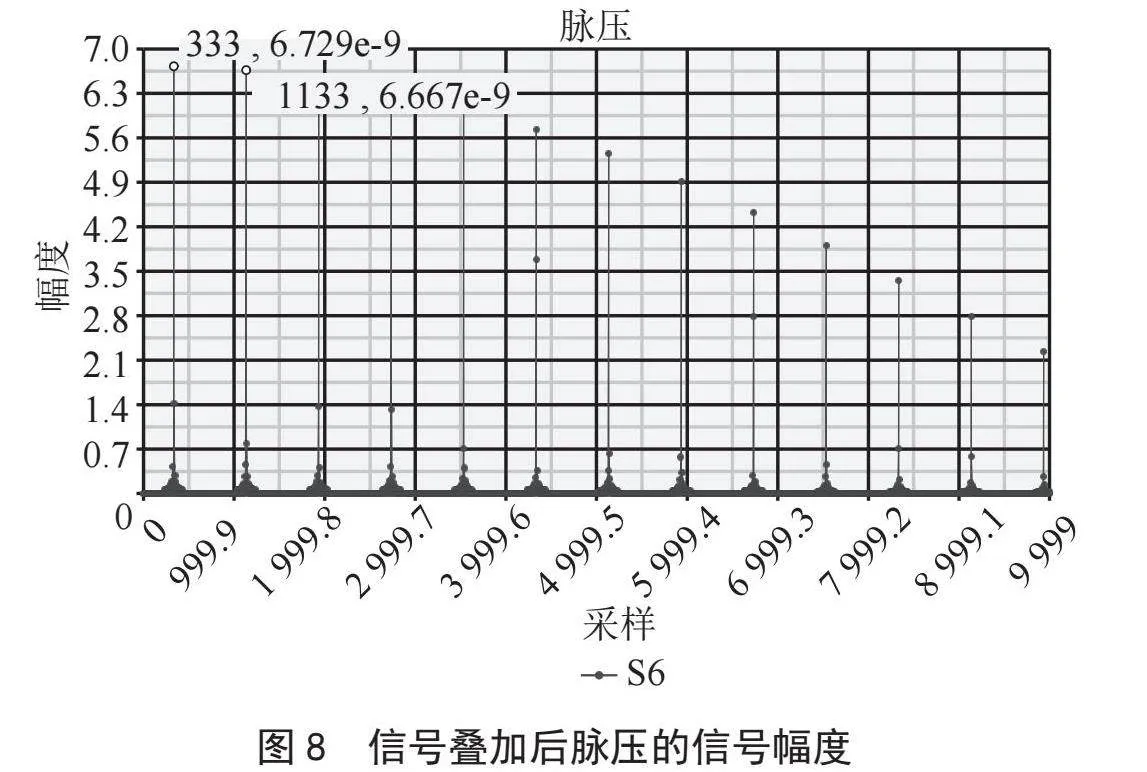
回波信号和干扰信号叠加,进入信号处理脉冲压缩后信号如图8所示,可见目标信号随时间推移,在固定距离门内幅度逐渐减小。经MTD处理后,测得的速度约为5 m/s,如图9所示,为目标速度与距离拖引速度的差值。
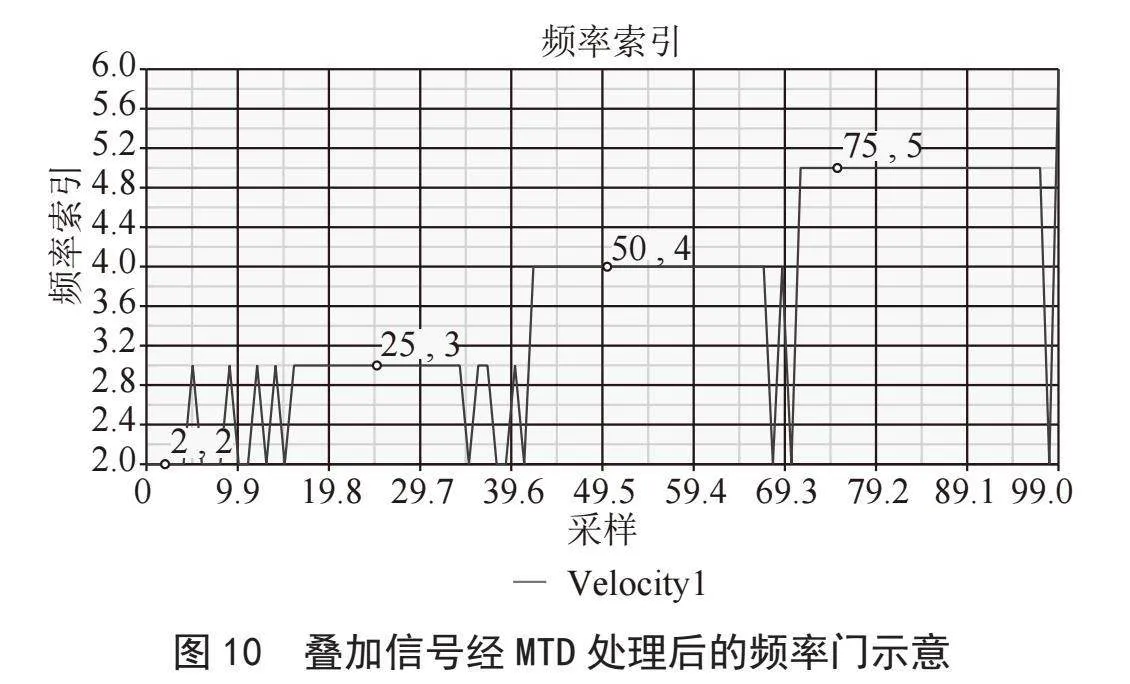
3.3" 速度拖引干扰仿真
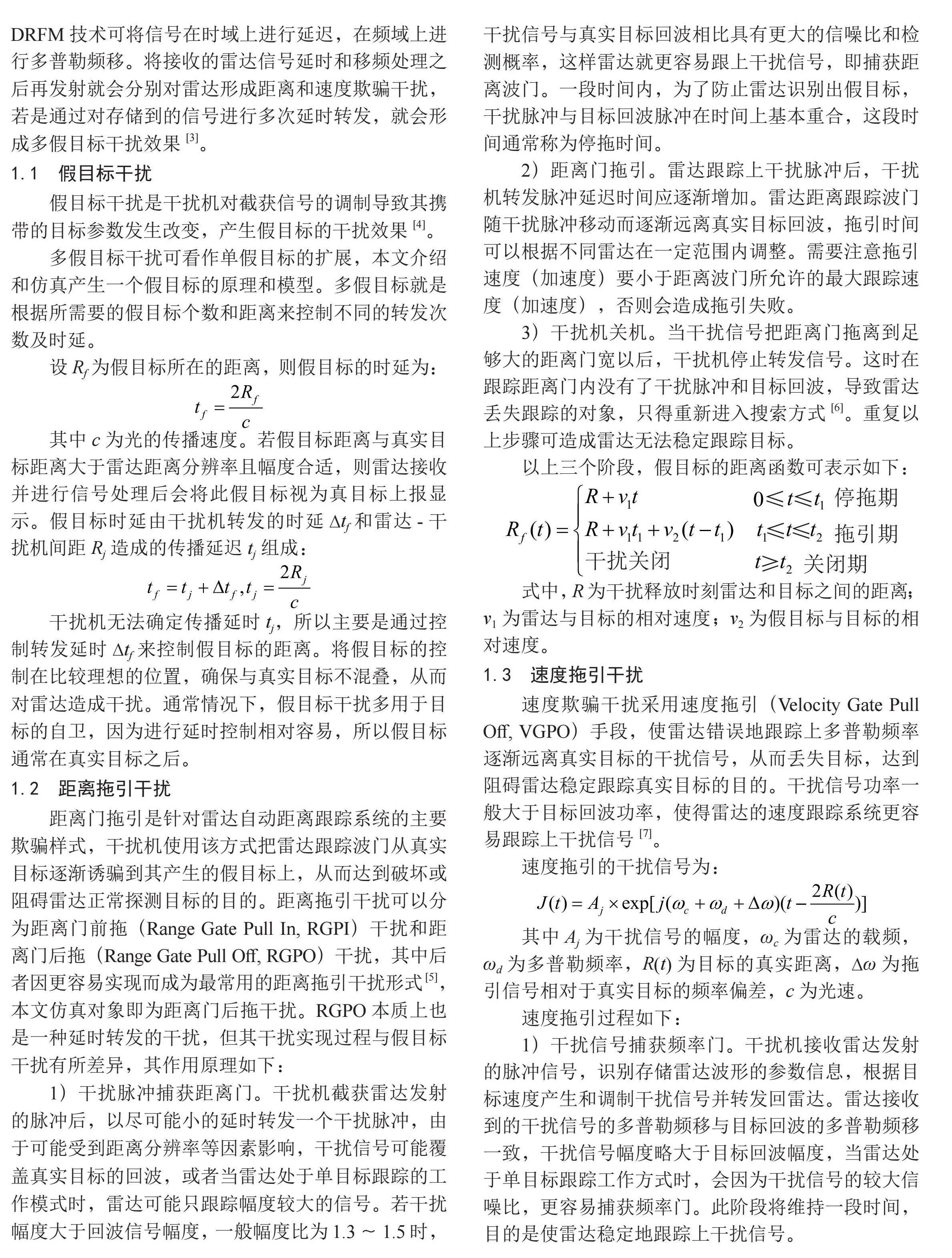
目标回波模块参数设置不变,在干扰信号产生模块中设置欺骗干扰样式为速度拖引干扰,信号增益设置为1.5,拖引加速度为25 m/s2。图10和图11分别为MTD处理后频率门和测得相应的速度数值。可见在跨门时有波动外,其余时间速度逐渐增大。
4" 结" 论
本文首先介绍了三种不同的欺骗干扰样式及原理,然后在SystemVue平台搭建了仿真模型,对假目标干扰、距离拖引干扰和速度拖引干扰进行了典型参数下的仿真,根据仿真结果可得出干扰的有效性。该仿真实验对雷达的抗干扰性能提升具有参考价值,可以为算法改进提供数据支撑。另外,本文仅仿真单一的距离或速度拖引干扰,对于现代具有探测距离-速度二维信息能力的雷达来说,因两个维度的参数改变不一致,容易被雷达识别,所以干扰能力受限。对于距离-速度联合干扰等干扰方式可进一步研究和仿真。
参考文献:
[1] 王慧娟.雷达有源欺骗干扰识别技术研究 [D].北京:北京邮电大学,2019.
[2] 周亮,孟进,吴灏,等.反向交叉眼对单脉冲雷达干扰效果分析及仿真验证 [J].航空学报,2019,40(8):156-165.
[3] 孙军锋.脉冲多普勒雷达的干扰技术研究 [D].西安:西安电子科技大学,2017.
[4] 陈泽盛,杨承志,邴雨晨,等.基于SystemVue的DRFM干扰仿真研究 [J].现代雷达,2021,43(9):99-104.
[5] 何仁军,熊杰.基于雷达点迹处理的抗RGPO干扰的机动目标跟踪 [J].电讯技术,2023,63(2):212-219.
[6] 解凯,陈永光,汪连栋,等.距离波门拖引方案的分析建模与评估 [J].系统工程与电子技术,2006(8):1158-1160+1163.
[7] 王琪,廖志忠,燕飞.基于概率数据关联的雷达导引头抗速度拖引干扰算法 [J].系统工程与电子技术,2022,44(2):448-454.
[8] 王君,王钦伟,薛涛.基于DRFM的雷达欺骗干扰源仿真技术 [C]//21全国仿真技术学术会议论文集.贵阳:[出版者不详],2021:23-27.
[9] 李书玉,胡增辉.基于速度拖引的灵巧噪声干扰设计与仿真 [J].现代雷达,2016,38(11):11-14+23.
[10] 赵杨,尚朝轩,韩壮志.SystemVue在雷达系统仿真中的应用 [J].舰船电子工程,2017,37(1):73-77.
作者简介:柳震洋(1991—),男,汉族,湖北十堰人,工程师,硕士研究生,研究方向:雷达总体设计。