摘" 要:作为城市地下管网系统的关键防护构件,井盖的安全状态直接影响市政设施运维效率与公共安全。针对传统井盖安全隐患检测方法存在效率低、误报率高等问题,文章提出基于改进YOLOv5的智能检测方法。通过构建多尺度特征融合机制,文章结合五折交叉验证法对标注数据集进行模型训练,实现了对破损、移位、缺失等典型安全隐患的精准识别。实验结果表明,改进模型在自建井盖数据集上的平均精度(mAP)达95.2%,相比于YOLOv4模型,精度和检测速度均有所提升。该算法通过优化特征金字塔结构与损失函数,有效增强了复杂路面场景下的目标表征能力,为城市基础设施智能化运维提供了可靠的技术支持。
关键词:井盖隐患;YOLOv5;目标检测;激活函数
中图分类号:TP183;TP39 文献标识码:A 文章编号:2096-4706(2025)03-0068-06
Research on Intelligent Recognition of Hidden Dangers of Manhole Covers Based on YOLOv5
HUANG Jian, XIANG Siyi
(Xijing University, Xian" 710123, China)
Abstract: As a key protective component of the urban underground pipe network system, the safety status of manhole covers directly affects the operation and maintenance efficiency and public safety of municipal facilities. To address the inefficiency and high 1 alarm rate of traditional methods for detecting hidden dangers in manhole covers, this paper proposes an intelligent detection method based on improved YOLOv5. By constructing a multi-scale feature fusion mechanism, this paper combines the 5-fold cross-validation method to train the model of the labeled dataset, and realizes the accurate identification of typical safety hazards such as breakage, displacement, loss, and so on. The experimental results show that the mean Average Precision (mAP) of the improved model on the self-constructed manhole cover dataset is 95.2%. Compared with the YOLOv4 model, the accuracy and detection speed are improved. By optimizing the Feature Pyramid Network structure and loss function, the algorithm effectively enhances the target representation ability in complex road scenarios, providing reliable technical support for intelligent operation and maintenance of urban infrastructure.
Keywords: hidden danger of manhole cover; YOLOv5; object detection; activation function
0" 引" 言
随着基础设施建设的高速发展,通信、电力、排水等各类地下管线设施日益增加,使得对各类井盖的巡检、养护、维修等工作量不断增长。现实生活中井盖分布广泛又碎片化,常处于室外复杂环境,风吹雨淋,容易被损坏或移位,给车辆、行人、光缆设施等带来很大的风险。由于井盖数量庞大、分布广泛且无法主动上报其状态,对井盖的隐患整改工作十分重要。井盖会存在损坏、凸起、缺失、井圈问题等隐患状态,存在隐患的井盖不仅影响了城市的整洁,还对公共安全构成了极大的威胁,现有的一些研究通过井盖内安装传感器实现智能井盖,施工维护成本太高,无法全面推广。为了解决以上问题,考虑引入AI手段实现井盖状态的快速、准确识别,提高审核管理人员工作效率和质量。
孔天宇等[1]提出了一种路面井盖病害检测模型AT-YOLO,实现了街景影像中路面井盖破损、塌陷的快速检测。但其没有对井盖丢失、没有盖等安全隐患进行检测,未能很好地解决路面井盖安全隐患。陈欣瑞等[2]提出一种利用立体深度摄像机和MGB-YOLO模型检测道路井盖的方法。该模型是通过使用MobileNetV3、全球注意机制(GAM)、YOLOv5s开发,在检测精度和模型效率之间取得平衡。
近年来,随着深度学习的不断发展,目标检测技术也取得了许多新进展。例如,多尺度特征融合技术通过将不同尺度的特征进行融合,提高了对小目标和遮挡目标的检测性能。注意力机制的应用则使得模型能够更专注于关键区域,进一步提高检测的准确性。此外,轻量级网络结构的发展也使得目标检测算法能够在保持一定性能的同时,降低计算复杂度和内存消耗,从而适用于移动设备和实时应用场景。
基于深度学习的目标检测算法通常可以分为两类:两阶段检测器和一阶段检测器。两阶段检测器,如Faster R-CNN,首先生成一系列候选区域,然后对这些区域进行分类和位置回归。这种方法在准确性和定位精度上通常较高,但速度相对较慢。而一阶段检测器,如YOLO和SSD,则直接对图像进行密集采样,并在每个位置上预测目标的类别和边界框。这种方法速度更快,但可能在某些情况下牺牲一定的准确性。
YOLO(You Only Look Once)是一种目标检测算法,其设计理念是只需要浏览一次图像就可以识别出图中的物体的类别和位置。近年来,随着深度学习技术的飞速发展,YOLO系列算法作为最具代表性的方法之一,以其高效、快速的特点受到了广泛关注。YOLOv1[3]使用1×1卷积层和3×3卷积层替代Inception Module。整个检测网络包括24个卷积层和2个全连接层,其中卷积层用来提取图像特征,全连接层用来预测图像位置和类别概率值。YOLOv2[4]在YOLOv1的基础上进行了改进,使用了多尺度的预测,以更好地处理小物体和重叠目标。此外,它还引入了Anchor Boxes的概念,通过预定义的一组Anchor Boxes进行目标的位置预测,进一步提升了检测的准确率。YOLOv3[5]在YOLOv2的基础上进一步提升了检测的准确率和实时性,满足了更多实际应用的需求。YOLOv4[6]在保持高速度的同时,显著提高了目标检测的准确性,结合了多种先进的目标检测技术和优化策略,使得YOLOv4能够有效地提取和利用多尺度的特征信息,从而提高检测性能。YOLOv5是YOLO系列中另一个具有里程碑意义的版本。它在保持YOLO系列算法快速、准确的特点的同时,更加注重模型的易用性和扩展性。YOLOv5提供了多种不同大小和复杂度的模型供用户选择,以适应不同场景的需求。在性能上YOLOv5通过引入自适应锚框、自适应图片大小等技术,进一步提升了检测的准确性和鲁棒性。
因为YOLO有出色的目标检测功能,该算法可以应用到以下领域:
1)安防监控领域。实时监控与事件预警:YOLO算法能够对监控视频中的目标进行实时检测,包括人员、车辆、动物等各类物体。例如在城市的安防监控系统中,它可以快速识别出在特定区域内出现的可疑人员,或者检测到未经授权进入的车辆,及时发出警报。交通监控与管理:用于检测交通流量,统计不同类型车辆的数量,识别交通违法行为,如车辆闯红灯、逆行、超速等情况。同时,也可以用于监测道路上行人的行为,保障交通安全。
2)自动驾驶领域。自动驾驶汽车需要对周围环境进行精确感知,YOLO可以帮助检测道路上的各种障碍物,包括其他车辆、行人、自行车、交通标志和信号灯等。例如,在复杂的城市道路环境中,准确识别出正在过马路的行人或者突然出现的非机动车辆,为车辆的决策系统提供关键信息。
3)工业检测领域。产品质量检测:在工业生产线上,用于检测产品的外观缺陷和尺寸精度。例如,在电子元件生产中,检测芯片表面是否有划痕、引脚是否完整;在机械零件制造中,测量零件的尺寸是否符合设计要求,对不合格产品进行筛选。装配检测:用于检查产品部件的装配是否正确。比如在汽车制造过程中,检测零部件是否安装到位,如轮胎是否正确安装、座椅是否安装牢固等,提高装配质量和生产效率。
1" YOLOv5模型
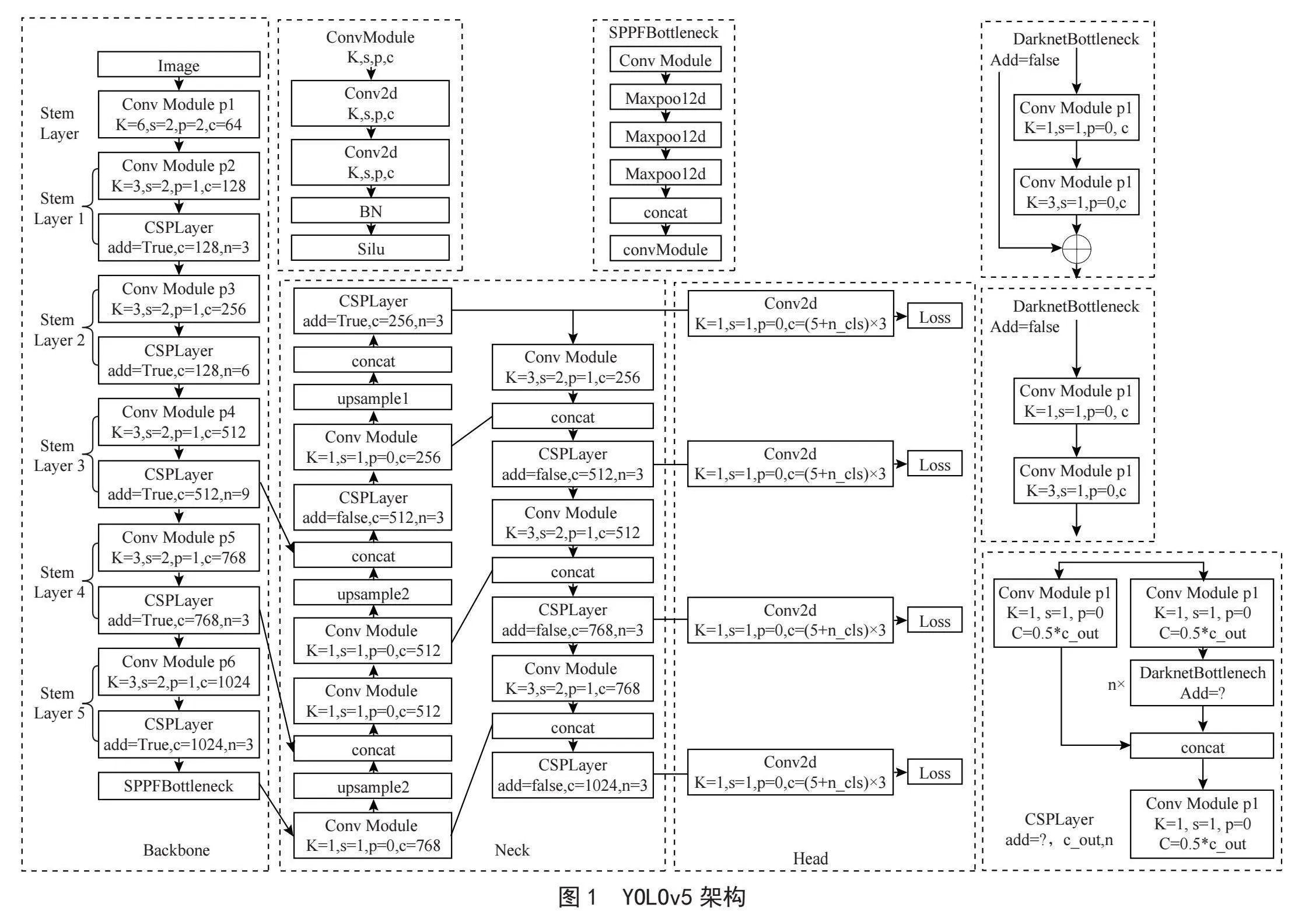
YOLOv5是一个目标检测模型其架构如图1所示,主要包括以下几个部分:
1)Backbone。这部分主要用于特征提取。它通常是一系列卷积层、批量归一化层和激活函数的组合,通过逐层提取图像的特征,将原始的图像数据转化为高层次的特征表示。
2)Neck。在Backbone之后,通常会有一些额外的网络层用于进一步融合和增强特征。这部分可能包括FPN(Feature Pyramid Network)或PANet(Path Aggregation Network)等结构,用于将不同尺度的特征进行融合,以提高模型对不同大小目标的检测能力。
3)Head。这部分负责根据提取的特征进行目标检测。它通常包括一些卷积层,用于将特征图转化为目标的边界框和类别预测。YOLOv5采用了一种直接预测边界框和类别概率的方式,而不是像一些其他方法那样采用候选区域生成和分类的方式。
在YOLOv5的架构中,除了上述提到的Backbone、Neck和Head部分,还有一些其他的组件和特性,使其成为一个高效且准确的目标检测模型:
1)YOLOv5采用了深度卷积神经网络(CNN)作为基础,通过堆叠多个卷积层来提取图像中的特征。这些卷积层使用不同大小的卷积核来捕捉不同尺度的特征信息,从而能够识别出不同大小的目标。
2)YOLOv5引入了残差连接(Residual Connections)的概念,通过跳过某些层来直接连接输入和输出,从而缓解深度神经网络中的梯度消失和表示瓶颈问题。这种连接方式有助于网络更好地学习特征的表示,提高模型的性能。
3)YOLOv5还采用了多尺度预测(Multi-Scale Prediction)的方法,通过在不同尺度的特征图上进行目标检测,从而提高了模型对不同大小目标的检测能力。这种多尺度预测的方式可以更好地捕捉图像中的上下文信息,提高检测的准确性。
4)YOLOv5还使用了数据增强(Data Augment-ation)技术来扩展训练数据集,增加模型的泛化能力。通过随机变换输入图像的亮度、对比度、饱和度等属性,以及进行裁剪、缩放等操作,可以生成更多的训练样本,使得模型能够更好地适应不同的场景和变化。
5)YOLOv5在训练过程中使用了优化算法和损失函数来指导模型的学习。通过不断地迭代和优化,模型能够逐渐提高目标检测的准确性和速度。
总之,YOLOv5是一个基于深度卷积神经网络的目标检测模型,通过引入残差连接、多尺度预测和数据增强等技术,提高了模型的性能和泛化能力。这些组件和特性的结合使得YOLOv5成为一个高效且准确的目标检测框架,适用于各种实际应用场景。
2" 实验及结果分析
2.1" 数据集
研究团队使用相机、手机等设备,在城市、乡镇街道或者路面等有井盖存在的区域进行实地拍摄。目前已收集到各类井盖图像2 500多张,包含有井盖完好、缺失、破损、未盖等各种情况,如图2所示。
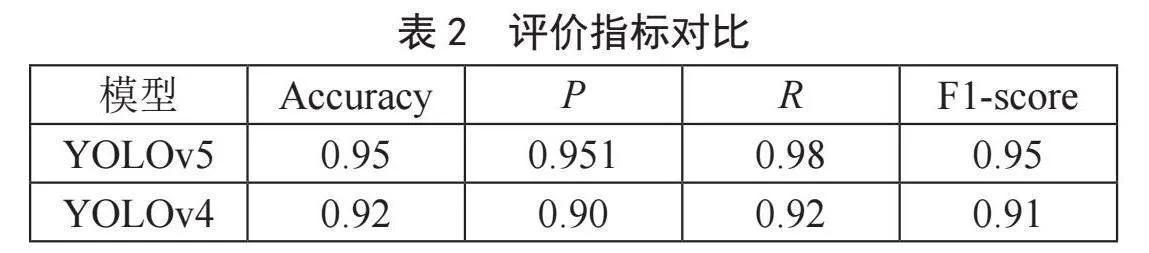
本文用Labelimg对图片进行标注[7],方便用YOLOv5进行检测,如图3所示。
图3中,根据井盖的不同情况,分别将其标注为improperly closed manhole、lose、good、broke、uncovered,依次代表“井圈问题”“井盖缺失”“井盖完好”“井盖破损”“井盖未盖”等情况[8-10]。对于2 500多个图片,本文按照5折交叉法进行划分,将其划分为训练集和测试。其中训练集占比为80%。划分好的数据集放到指定文件夹中。
2.2" 训练及结果
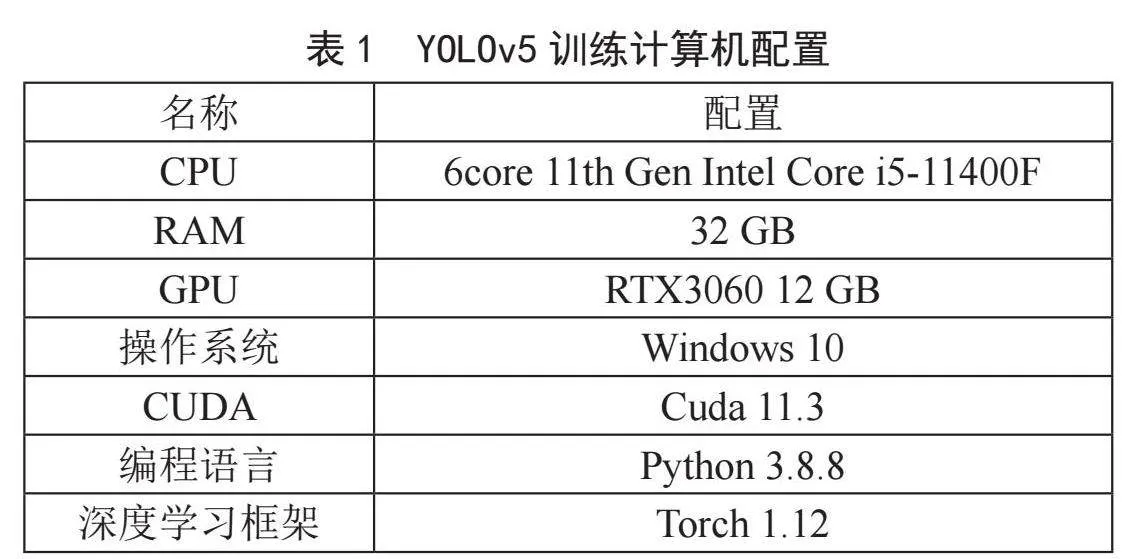
训练时,首先修改配置文件,在models文件夹下的相应模型配置文件(.yaml)中,可以修改一些参数,如类别数量(nc = 5),使其与数据集中的目标类别数量相匹配。还可以调整模型的一些超参数,如网络的深度乘数(depth_multiple)和宽度乘数(width_multiple),这些参数可以控制模型的大小和复杂度。然后启动训练脚本:通过运行train.py脚本来启动训练过程。在命令行中可以指定一些训练参数,如img_size(输入图像的大小)、batch_size(每次迭代使用的图像数量)、epoch(训练的轮数)等。本次井盖图像训练中,设置img_size = 640,batch_size = 16,epoch = 100。实验中使用的计算机配置如表1所示。
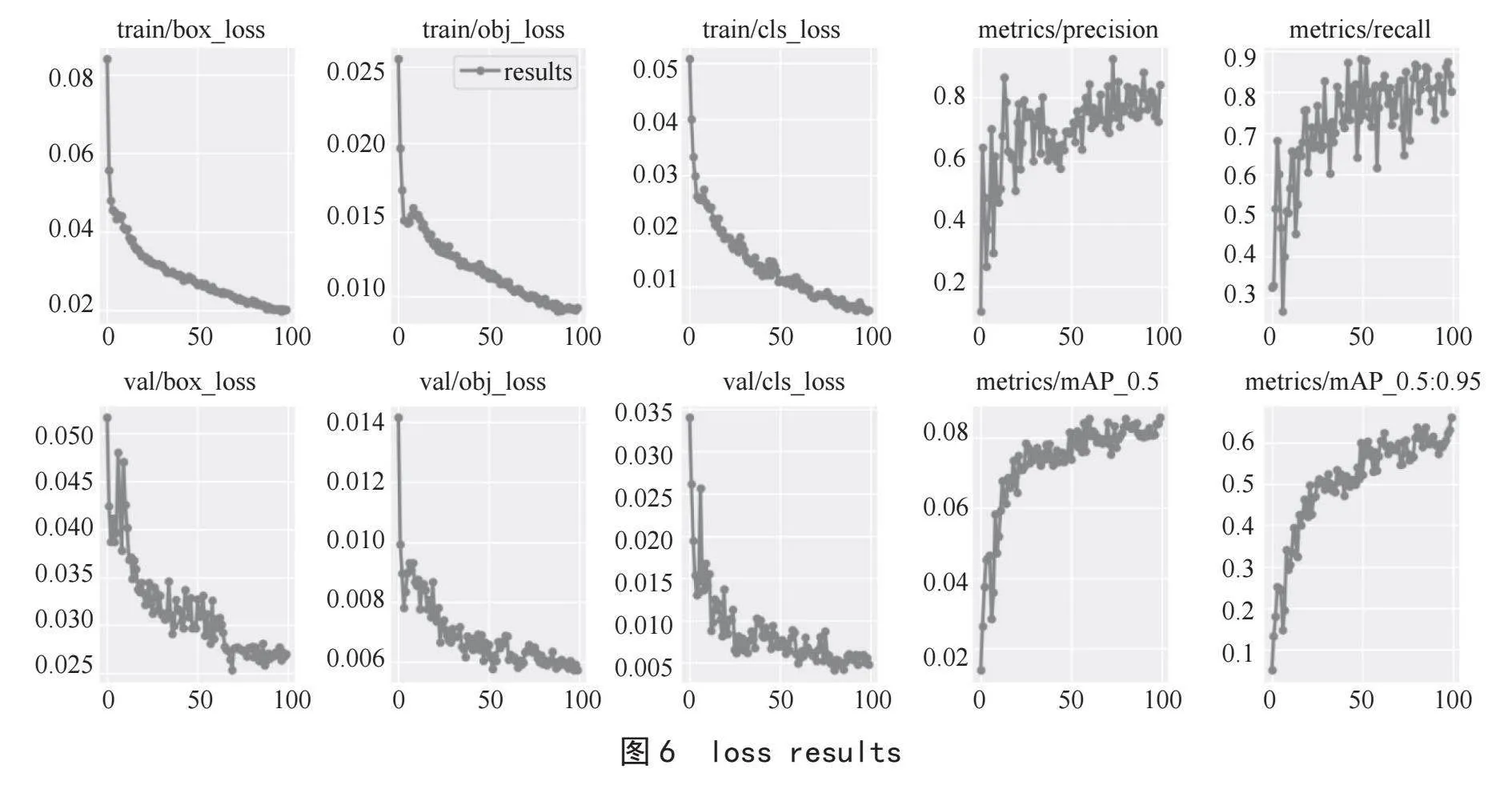
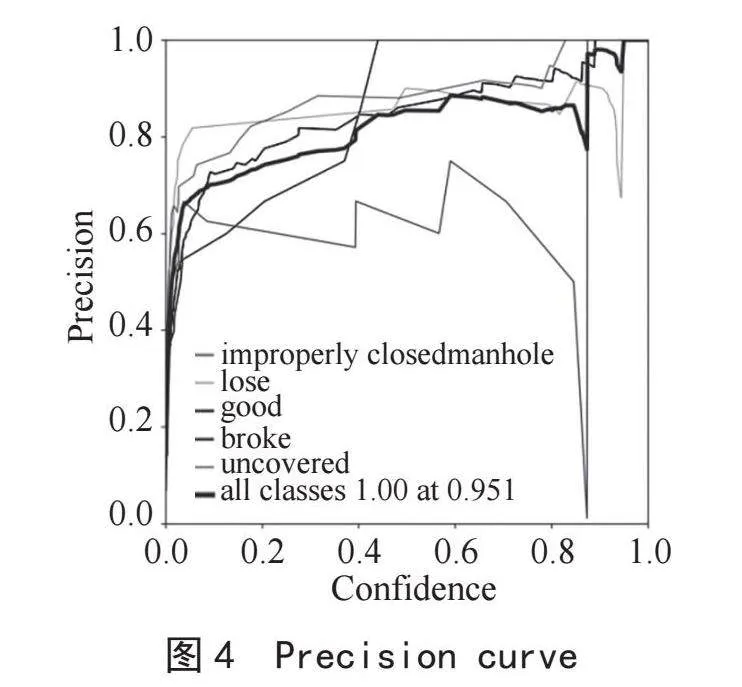
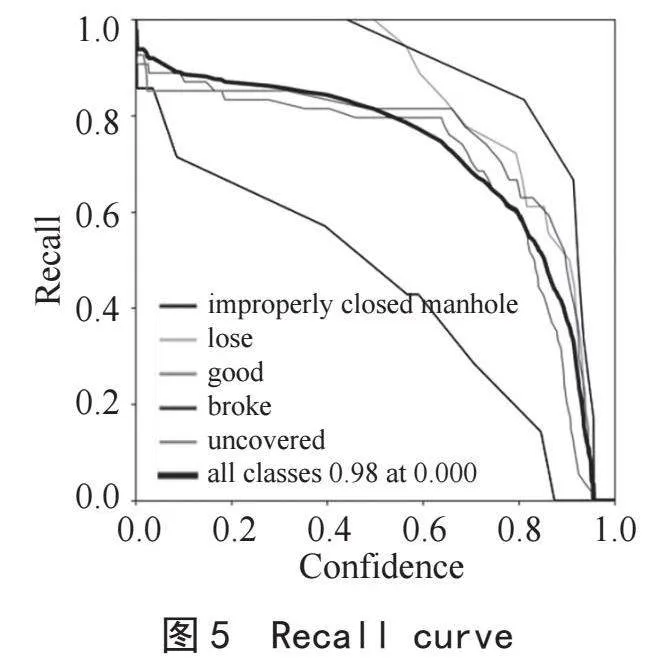
本文用YOLOv5架构训练标注好的井盖数据集,经过300轮训练,本文得到Precision-Recall、Recall、loss曲线等,如图4至图6所示[11]。
从以上曲线中可以看出,经过训练后,能够准确识别出各种井盖状态,精度可达0.95以上;同时cls_loss、box_loss、obj_loss等都下降到了0.01以下。
2.3" 测试及结果
首先,读取图像:使用OpenCV等库读取单张测试图像,将其转换为模型所需的格式。同时调整维度顺序和大小以匹配模型输入。
然后进行推理:将处理后的图像张量输入到加载好的模型中,通过model(img_tensor)这样的方式得到模型的输出。模型输出包含了检测到的目标的类别、位置(边界框坐标)和置信度等信息。
最后解析输出:根据模型输出的格式(通常是一个包含边界框坐标、类别置信度等信息的张量),使用非极大值抑制(NMS)等方法来筛选出最有可能的目标检测结果。例如,NMS会根据边界框的重叠程度和置信度,去除重叠度过高的冗余框,保留每个目标最准确的边界框。
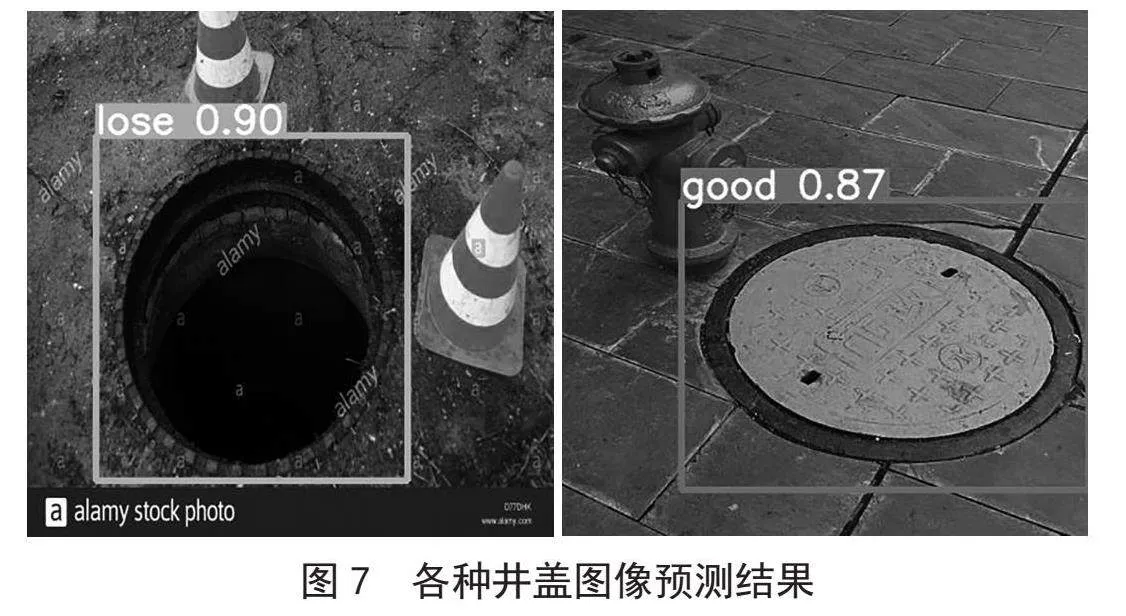
用上述方法对测试集的图像进行预测,得到的结果如图7所示。
从图7可以看出,当用最优模型对井盖图像进行预测时,其目标检测的精度达到了0.87以上,预测单个图像花费大约0.2 s。
2.4" 结果分析
YOLOv5是一种先进的目标检测算法,其性能评估至关重要,以了解其准确性、速度和鲁棒性。以下是YOLOv5的主要评价指标:
1)平均精度(mAP)。mAP是YOLOv5模型性能评估中最常用的指标之一,它衡量模型在不同IoU(交并比)阈值下的平均精度。mAP是通过计算不同类别下的精度-召回率曲线下的面积来得到的。mAP数值越高表示模型性能越好。在COCO数据集上,YOLOv5的mAP可以达到50%左右。对于每个类别,计算每个检测框的平均精度(AP),然后对所有类别的AP求平均得到mAP:
mAP = (AP1+AP2+AP3+AP4+AP5)/5" " " (1)
式中,mAP表示平均精度,AP1、AP2、AP3、AP4、AP5分别表示5个类别精度。
2)交并比(IoU)。IoU是衡量预测框与真实目标框重叠程度的指标,计算公式为(检测框与真实目标框的交集面积)/(检测框与真实目标框的并集面积)。IoU阈值决定了检测框与真实目标框的重叠程度。较高的IoU阈值会导致更严格的匹配,从而降低mAP。计算式为:
(2)
式中,表示两个区域的交集,表示两个区域的并集。
3)精度(Precision)。精度(P)是指模型预测为正例的样本中,真正为正例的样本数量占所有预测为正例的样本数量的比例。精度反映了模型对正例的识别能力。计算式为:
P = TP/(TP+FP) (3)
式中,TP表示真正例,FP表示假正例。
4)召回率(Recall)。召回率(R)是指模型正确预测为正例的样本数量占所有真正为正例的样本数量的比例。召回率反映了模型对正例的覆盖能力。
R = TP/(TP+FN) (4)
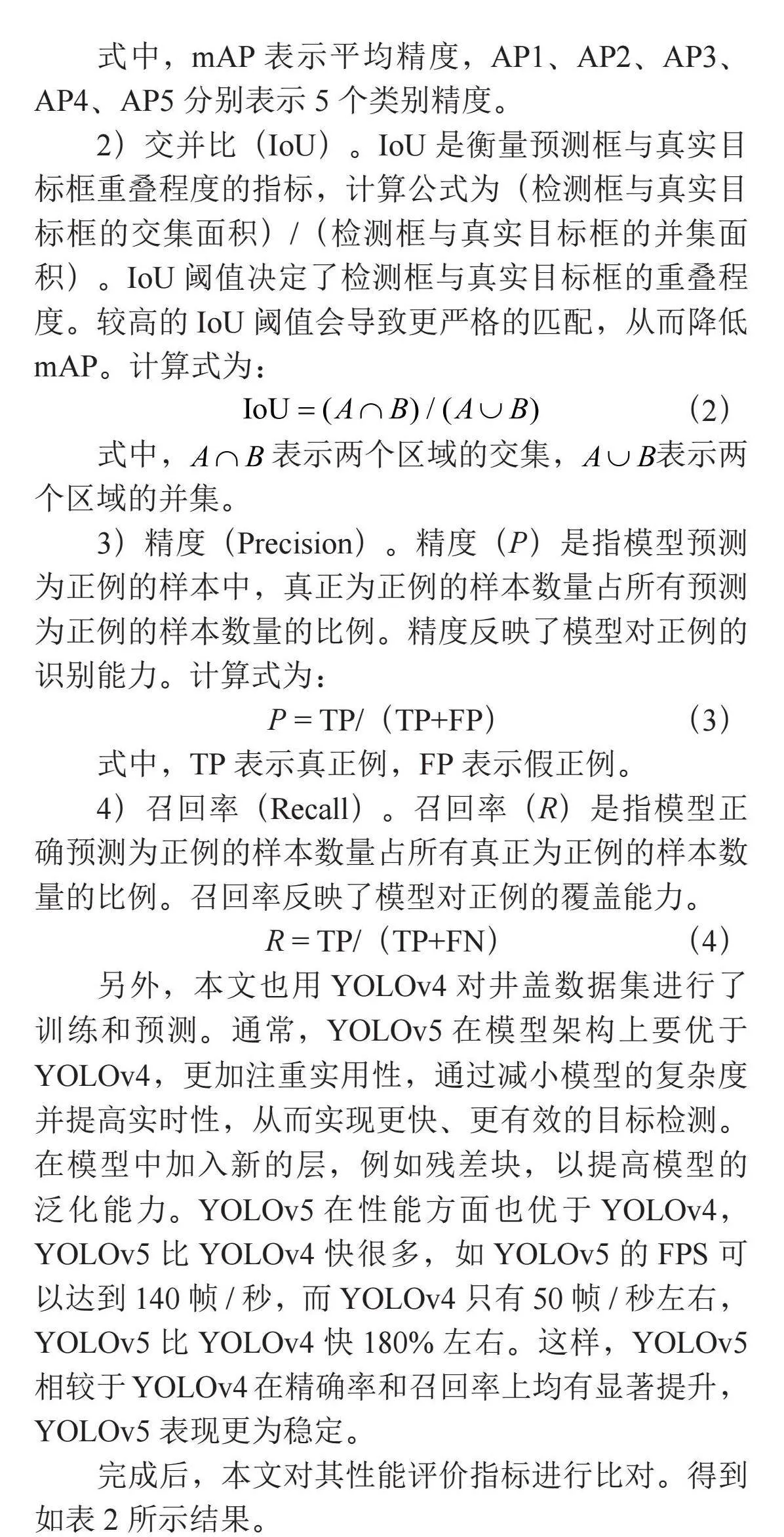
另外,本文也用YOLOv4对井盖数据集进行了训练和预测。通常,YOLOv5在模型架构上要优于YOLOv4,更加注重实用性,通过减小模型的复杂度并提高实时性,从而实现更快、更有效的目标检测。在模型中加入新的层,例如残差块,以提高模型的泛化能力。YOLOv5在性能方面也优于YOLOv4,YOLOv5比YOLOv4快很多,如YOLOv5的FPS可以达到140帧/秒,而YOLOv4只有50帧/秒左右,YOLOv5比YOLOv4快180%左右。这样,YOLOv5相较于YOLOv4在精确率和召回率上均有显著提升,YOLOv5表现更为稳定。
完成后,本文对其性能评价指标进行比对。得到如表2所示结果。
通过以上的数据比较可以看出,在相同的数据集下,电脑配置和迭代次数都相同的情况下,YOLOv5模型训练的速度更快,精度更高。训练后生成的模型容量更小,预测所花费的时间更少,能更好地进行目标检测。
3" 结" 论
本文采用YOLOv5模型对井盖数据集进行了目标检测。综合以上研究过程,可得到训练后得到的最优模型能够快速、准确检测各种类型的井盖图像。准确识别出各种有安全隐患的井盖。相比于YOLOv4模型具有检测精度高、速度更快。该方法可推广应用到其他目标检测领域。
参考文献:
[1] 孔天宇,戴激光.改进YOLOv5的路面井盖病害检测 [J].遥感信息,2023,38(3):40-46.
[2] 陈欣瑞,周洋,赵屹涛,等.基于改进YOLOv5的移动端螺栓缺失检测方法 [J].现代制造工程,2022(11):108-114+143.
[3] 朱久牛,李立明,柴晓冬,等.基于改进YOLOv5算法的地铁车辆轴箱盖螺栓定位方法研究 [J].智能计算机与应用,2023,13(10):29-34.
[4] 王文胜,年诚旭,张超,等.基于YOLOv5模型的非住宅区自动垃圾分类箱设计 [J].环境工程,2022,40(3):159-165.
[5] 雷俊华.基于改进YOLOv5s的复杂背景下垃圾检测系统设计与实现 [D].武汉:中南财经政法大学,2023.
[6] 吴送英,刘林芽,江家明,等.复杂背景下铁路扣件的改进YOLOv5s检测算法 [J].中国铁道科学,2023,44(3):53-63.
[7] 项融融,李博,赵桥.基于改进YOLOv5s的口罩佩戴检测算法 [J].国外电子测量技术,2022,41(7):39-44.
[8] 惠康华,刘畅.基于YOLO5Face重分布的小尺度人脸检测方法 [J].计算机仿真,2024,41(3):206-213.
[9] 林刚,魏欣,刘春生,等.基于区域划分和YOLO5的日用陶瓷表面缺陷检测方法.CN202211193767.1 [P].2023-01-06.
[10] 倪卫国,黄晓荣,栗鑫,等.基于YOLO5的无人机智能火情巡检系统研究 [J].中国宽带,2023,19(3):193-195.
[11] 刘寅龙,王杰,曹昂,等.基于YOLOv5s的铝型材表观缺陷检测方法 [J].制造业自动化,2024,46(1):169-173.
作者简介:黄健(1973—),男,汉族,陕西富平人,副教授,硕士研究生,研究方向:嵌入式开发技术。