

摘" 要:手机取卡针在生产过程中常出现表面划伤、磨伤、异色等缺陷,这些缺陷严重影响产品的质量与交付。针对现有取卡针缺陷检测方法的局限性,该研究构建了基于YOLOv8的取卡针缺陷检测模型,对3种常见的取卡针表面缺陷进行学习、训练和验证。通过数据集构建、模型训练和模型评测3个步骤,实现了对手机取卡针表面缺陷的自动检测。实验结果表明,该模型在多类别缺陷检测中的平均精确度达到了98.45%,其中划伤、磨伤和异色缺陷的识别精确度分别达到了98.89%、97.87%和96.98%,验证了模型的有效性。此外,YOLOv8模型具有内存占用小、检测速度快等优势,显著提升了模型的工程适用性。
关键词:YOLOv8;手机取卡针;缺陷检测;检测速度
中图分类号:TP391.4;TP183" 文献标识码:A" 文章编号:2096-4706(2025)04-0058-06
Research on Mobile Phone Card Removal Pin Defect Detection Method Based
on YOLOv8
CHEN Guangwei, JIANG Yongchun
(Qingdao University, Qingdao" 266071, China)
Abstract: The surface scratches, abrasions, discoloration, and other defects often occur in the production process of the mobile phone card removal pin, which seriously affect the quality and delivery of products. To address the limitations of the existing card removal pin defect detection methods, this research constructs a card removal pin defect detection model based on YOLOv8 for learning, training, and verifying three common card removal pin surface defects. Through the three steps of dataset construction, model training, and model evaluation, the automatic detection of the surface defects of the mobile phone card removal pin is realized. The experimental results show that the average accuracy of the model in multi-category defect detection reaches 98.45%, and the recognition accuracies of scratches, abrasions, and discoloration defects reach 98.89%, 97.87%, and 96.98%, respectively, verifying the effectiveness of the model. In addition, the YOLOv8 model has the advantages of small memory usage and fast detection speed, which significantly improves the engineering applicability of the model.
Keywords: YOLOv8; mobile phone card removal pin; defect detection; detection speed
0" 引" 言
手机取卡针作为手机的必备配件,其质量与美观影响着手机品牌的整体形象与客户的信任,高强度,高质量,实用、美观的外形会提升手机品牌的应用市场。当前手机取卡针的铸造主要采用金属粉末注射成型技术,质检主要依靠人工肉眼观察,不仅效率低下,而且准确率低,存在一定比例的次品漏检的风险。本文通过分析手机取卡针缺陷的主要类型与特点,构建了基于YOLOv8的手机取卡针缺陷检测系统,对3种常见的手机取卡针缺陷进行数据采集,通过数据准备、模型训练和性能评估3个步骤,完成手机取卡针实时质检系统的设计。
近年来,深度学习技术不断地在计算机视觉图像检测领域获得应用,它被用来定位、识别及评估多样化的损伤与缺陷问题[1]。尤其在图像分类、对象识别及定位的研究范畴内,卷积神经网络(CNNs)的应用极为广泛[2]。与传统的二维图像处理技术及计算机视觉方法相比较,CNNs通过迭代训练的过程自主学习图像特征,省去了逐层人工设计特征提取器的烦琐,大幅度简化了图像预处理步骤,故而逐渐被采纳来实现手机取卡针各种缺陷(例如划痕、磨损等)的自动化识别任务。尽管如此,CNNs的应用受限于其对大规模训练数据集的依赖、对硬件资源的高要求,以及训练过程中复杂度与计算负担的增加。另一方面,基于区域的卷积神经网络(R-CNN)采取了选择性搜索策略以生成区域提议,随后将这些提议送入CNN模型进行特征抽取,并借助支持向量机分类器得出分类概率,最终执行边界回归操作于已分类的图像上。这种基于特征的识别策略展现出了较高的查全率,但也不免存在训练周期长、计算密集型的挑战。
1" YOLOv8模型
1.1" 模型的结构
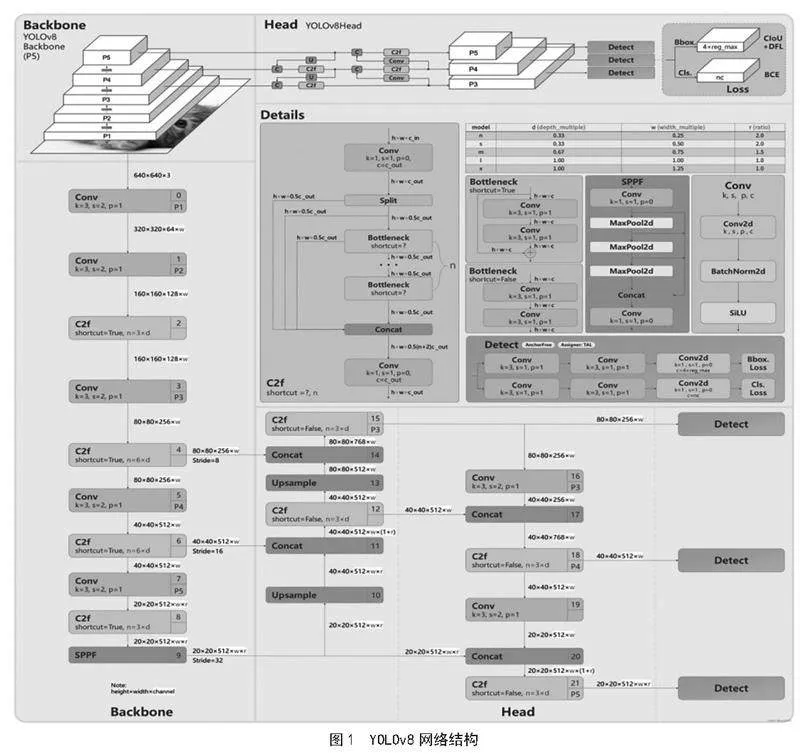
在实施取卡针缺陷的工程检测实践中,不仅要求高度的检测精确度,还强调检测效率的重要性,以此确保检测结论既准确无误又及时有效。在此背景下,YOLOv8s作为一种前沿的实时目标识别网络,展示出其在这两方面尤为突出的优势。相比YOLOv5所需的27 MB内存空间,YOLOv8通过对其网络架构的深入优化(参见图1),不仅降低了内存占用,还加快了推理速率[3],表现出更强的性能提升。作为一个活跃更新且开放源代码的网络模型,YOLOv8s还拥有易于配置的环境、快速模型训练、批处理能力的支持等诸多实践友好特性[4]。目前,YOLOv8算法已揭晓四个迭代版本:YOLOv8n、YOLOv8s、YOLOv8m(两次提及)、YOLOv8x。其中,YOLOv8s以其在网络深度和特征图维度上的精简设计,在YOLOv8系列中独树一帜,而其他三款模型则是基于YOLOv8s通过增加深度和宽度来适应不同应用场景对检测精度与速度的多元化需求,研究人员与工程师可根据具体应用场景,甄选适宜的YOLOv8模型实施部署[5]。因其结合了高检测精度与超高速推理时间,YOLOv8s非常适合应用于对即时反应有严格要求的手机取卡针缺陷监测环节。概括而言,YOLOv8在手机取卡针缺陷检测工程实践中的卓越性能,充分确保了检测结果的准确度与实时性双重标准。随着不断的优化演进,YOLOv8预示着将为该领域带来更高效、更精准的检测解决方案[6]。
1.2" 模型的特点
高速实时检测:YOLOv8s在保持高准确率的同时,实现了高速的实时检测。这使得YOLOv8s能够在各种实际应用场景中,如无人驾驶、视频监控、机器人视觉等方面发挥重要作用。
高精度检测:YOLOv8s在各种对象检测标准数据集(如COCO、PASCAL VOC等)上表现出了优越的性能。通过引入更先进的神经网络结构和训练策略,YOLOv8s进一步提高了检测的准确率和召回率,降低了误报率。
多尺度检测:YOLOv8s采用了多尺度检测策略,可以有效地检测不同大小的目标。这一特点使得YOLOv8s在面对各种复杂场景时具有更强的鲁棒性。
端到端训练:YOLOv8s采用端到端的训练方式,整个检测过程无须额外的后处理步骤。这使得YOLOv8s在训练和推理过程中更加高效。
强大的扩展性:YOLOv8s支持多种主流深度学习框架,如TensorFlow、PyTorch等,方便研究者和开发者在不同平台上进行部署和应用。同时,YOLOv8的网络结构和训练策略可以根据实际需求进行调整,以满足不同场景的检测需求。
2" 取卡针缺陷识别模型
2.1" 取卡针缺陷识别模型构建
为了提高手机取卡针质检效率与质量,构建基于YOLOv8s的手机取卡针实时质检系统,其主要包括数据处理,模型构建与评测,服务服务封装3个步骤(图2)。数据准备:数据准备主要包括数据采集,数据标注,数据增强三部分,数据采集需要借助专业的采集设备,高速工业相机,固定灯光,反差背景纸等,数据标注使用的是Labelme,是一个免费开源工具,数据增强是使用YOLOv8集成的[7]。模型训练与评测:将标注完成的数据集进行划分,我们按照7∶1∶2比例划分训练集、验证集、评测集,训练目标识别模型,进行模型评测,主要使用精确率与召回率两个指标。服务封装与上线:这一步是模型从研发到落地应用关键步骤,需要将模型封装到服务里面,对外提供一个API接口,工业质检流水线上的取卡针图片将会传回后端进行判断,如果存在问题,将进行筛选[8]。
2.2" 数据集构建
根据产线上淘汰的带缺陷手机取卡针样品,这些样品是从某某手机生产线中筛选出来的,主要是针对在质检过程中发现的缺陷产品进行采集。我们对样品的缺陷进行分类,获取缺陷类型列表,包括划伤、磨伤、异色等10余种表面缺陷,经过分析,按照缺陷占比与影响程度选取了划伤、磨伤、异色3种常见的缺陷进行研究。由我方团队搭建与产线上同等类型的灯光环境进行数据采集,以确保数据采集时的光照条件与生产环境一致,进而提高拍摄数据的质量和准确性。使用高清工业摄像机对带缺陷手机取卡针正反面进行拍摄,然后对拍摄的数据进行人工标注,使用Labelme软件对缺陷区域进行目标检测框和缺陷类型标注,标注完成数据需要转换成YOLOv8模型训练需要的格式,标注标签包括缺陷区域框的坐标以及缺陷类型。由于人工标注的数据量较少,无法满足模型训练的要求,还需要使用反转,裁剪等方式对数据进行数据增强[9]。3种缺陷类型占比也存在一定差异,为了解决长尾效应,我们可以参考已有缺陷人工制造一些缺陷数据,保证每种缺陷类型训练数据基本相同。最终获取30 000张训练数据,各种缺陷代码,分类编号和样本数量如表1所示。
2.3" 模型评价指标
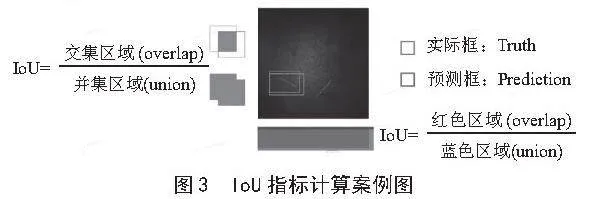
手机取卡针缺陷检测模型是一个目标检测模型,对模型进行评测主要从缺陷检测的精度和图像检测的速度两方面进行评测。检测精度评价指标有交叉比(IoU)、精确度(Precision)和召回率(Recall)、F1-Score、PR曲线。检测速度主要有前传耗时、每秒帧数(FPS)、浮点运算量(FLOPs)等。我们主要采用精确度、召回率、IoU来评价模型等检测精度,使用FPS来评价模型性能。IoU计算方法如图3所示。
精确度(P)和召回率(R)的计算式如下:
F1-Socre(F)的计算式如下:
FPS用来衡量设计模型每秒钟能够识别图像样本的数量,值越高则表示模型识别速度越快,速度越快则模型的性能越强。
2.4" 模型训练
将采集的手机卡针图像样本数据,按照70%作为训练集,20%作为评估集,10%作为评估集。用训练数据对手机取卡针缺陷识别模型进行训练调参,用评估集来评估模型训练指标,训练完成后会获取到一个best.pt模型文件,接下来使用评测集对模型进行评测[8]。模型训练环境为Ubuntu 20.04,显卡为英伟达V00,显存为32 GB。实验中,批处理batch_size设置为64,迭代次数epochs设置为500次[10]。
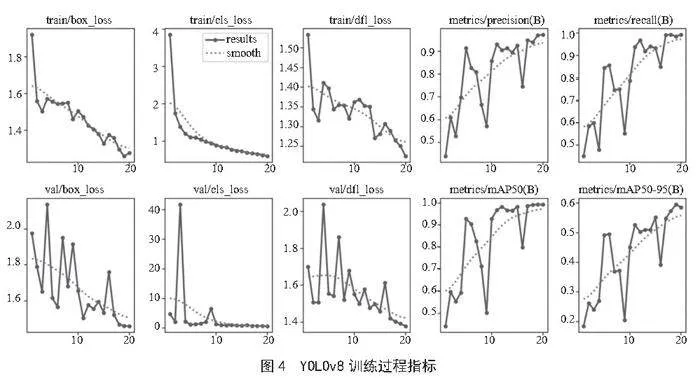
损失函数用来计算模型的输出预测值和实际真实值的差异,损失函数设计的合理与否极大程度的决定了模型的性能。图4为模型训练过程中的损失函数,数据参考如下:
1)定位损失(box_loss):计算预测框与标定框之间的误差,值越小定位得越准。
2)分类损失(cls_loss):表示锚框与气对应的真实分类正确与否,值越小分类得越准。
3)置信度损失(dfl_loss):计算模型网络的置信度,值越小判定的目标越准。
4)精确度(Precision):衡量模型在所有预测为正例的样本中有多少是正确的,越大识别越准。
5)召回率(Recall):衡量模型能够找出真实正例的能力,越大识别越全。
6)平均精度(mAP):综合考虑了模型在不同精度和召回率条件下的性能越大性能越好。
3" 测试结果与分析
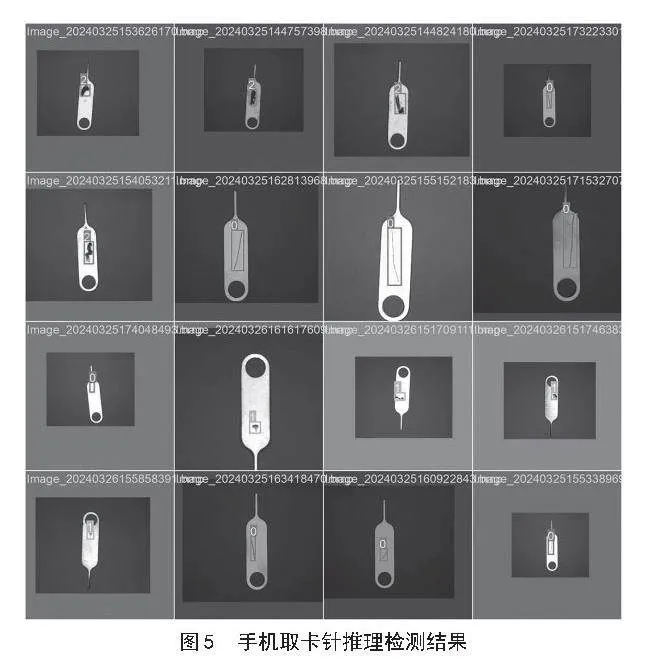
图5展示了若干手机取卡针瑕疵的辨识情形,其中,辨识结果借助带有缺陷类型编码的矩形框架予以标记。这些矩形框架的界定区域代表相机视野中待测物体瑕疵大小。
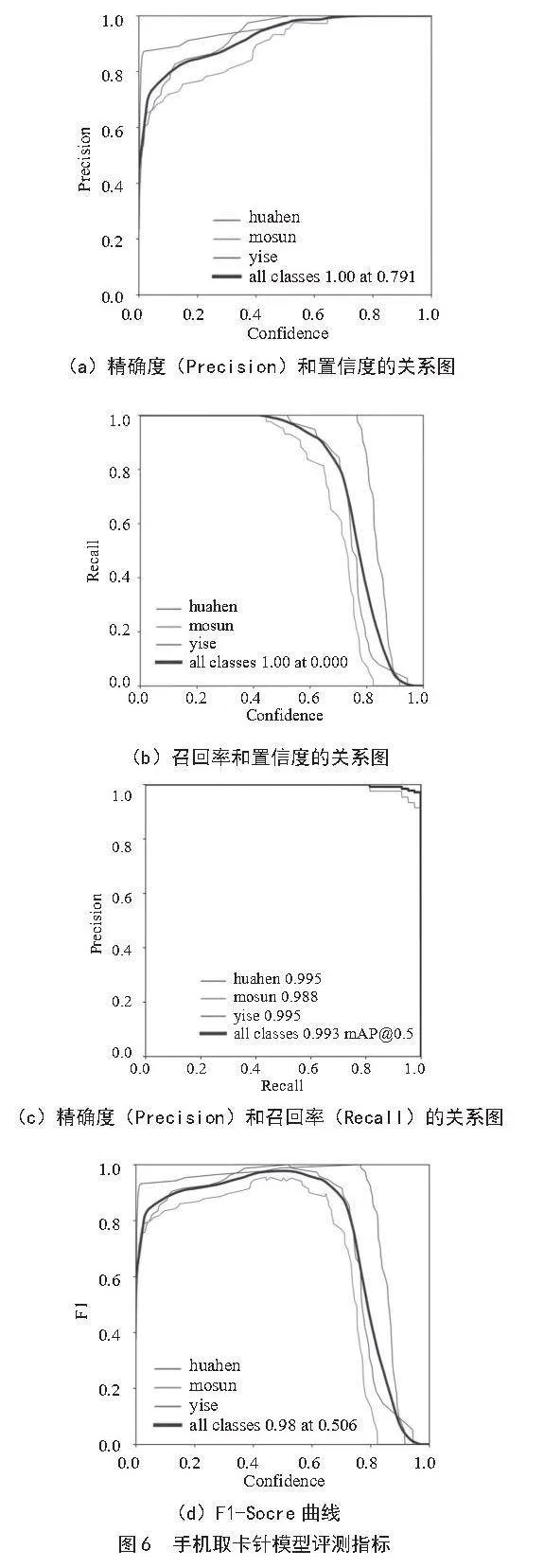
手机取卡针模型评测结果如图6所示,精确度(Precision)曲线显示,在置信度为0.791时,所有类别的精确度达到了1.00,这意味着在此阈值上模型没有产生任何假正例,即所有标记为正的预测都是正确的。召回率(Recall)曲线接近右上角,意味着模型在绝大多数召回率水平上都保持了较高的精确度。对于所有类别来说,在召回率为0.5的情况下,平均精确度已经趋近于1,图6(d)显示所有类别的综合F1-Socre在置信度为0.506时达到了0.98,这是一个非常高的性能指标,表明该模型具有较高的召回率和精确度。
4" 结" 论
文章提出一种基于YOLOv8的手机取卡针缺陷检测方法,通过构建基于目标检测手机取卡针的缺陷检测模型,实现了对常见3种手机取卡针缺陷的自动检测与识别,并通过真实的测试数据进行验证,在实际生产环境中,可以配合传送带进行自动化缺陷产品挑拣。模型实验结果表明,通过YOLOv8s搭建的取卡针表面缺陷识别模型,多类别平均精确度可达98.45%,其中划伤、磨伤、异色缺陷识别的平均精确度分别可达98.89%、97.87%和96.98%,验证了该模型的有效性。
参考文献:
[1] 蓝金辉,王迪,申小盼.卷积神经网络在视觉图像检测的研究进展 [J].仪器仪表学报,2020,41(4):167-182.
[2] 张涛,刘玉婷,杨亚宁,等.基于机器视觉的表面缺陷检测研究综述 [J].科学技术与工程,2020,20(35):14366-14376.
[3] 王银,王晨晨,赵志诚,等.改进YOLOv8的安检违禁物品检测 [J/OL].控制工程,2025:1-6[2025-02-05].https://doi.org/10.14107/j.cnki.kzgc.20230586.
[4] 鲍禹辰,徐增波,田丙强.基于YOLOv8改进的服装疵点检测算法 [J].东华大学学报:自然科学版,2024,50(4)49-56.
[5] 李昊璇,苏艳琼.基于改进YOLOv8的道路缺陷检测 [J].测试技术学报,2024,38(5):506-512.
[6] 李松,史涛,井方科.改进YOLOv8的道路损伤检测算法 [J].计算机工程与应用,2023,59(23):165-174.
[7] VARGHESE R,SAMBATH M. YOLOv8: A Novel Object Detection Algorithm with Enhanced Performance and Robustness [C]//2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems(ADICS).Chennai:IEEE,2024:1-6.
[8] 周华,郑荣,肖荣.工业场景下AI质检关键技术及平台架构研究 [J].现代信息科技,2022,6(5):149-151+156.
[9] 胡玮,赵菊敏,李灯熬.基于改进YOLOv7-Tiny的轻量化激光器芯片缺陷检测算法 [J].太原理工大学学报,2025,56(1):137-147.
[10] 张培培,王昭,王菲.基于深度学习的图像目标检测算法研究 [J].国外电子测量技术,2020,39(8):34-39.
作者简介:陈光伟(1996—),男,汉族,山东泰安人,硕士研究生,研究方向:计算机技术;江永春(1972—),女,汉族,山东青岛人,副教授,工学硕士,研究方向:数字影像非线编技术、特效合成技术、视觉传达设计。
收稿日期:2024-09-23