


收稿日期:2023-07-21
DOI:10.19850/j.cnki.2096-4706.2024.05.042
摘" 要:文章对如何提高电动自行车车速检测的准确度进行了研究。一方面对电动自行车驱动电机霍尔信号滤波整形,通过单片机精确计算出信号周期,进而得出准确的电机转速;另一方面针对不同体重的电动自行车驾驶员,对电动自行车车轮产生的压力不同,进而导致轮子实际运行半径的不同,文章采用手动输入车轮半径的方式,使得车轮半径的参数更加精准。以上两个改进措施大大提高了电动自行车车速检测的准确度。当电动车超速时,提示器准确发出超速报警,从而减少交通事故的发生。
关键词:车速;提示器;车速准确度;电动车
中图分类号:TP368" 文献标识码:A" 文章编号:2096-4706(2024)05-0194-05
An Innovative Intelligent Electric Bicycle Speed Reminder
QIAN Shaowei, ZHU Junfan, SHEN Bin, TANG Zhiling
(1.Suzhou Higher Vocational School, Suzhou" 215009, China;
2.Suzhou Branch of Jiangsu United Vocational and Technical College, Suzhou" 215009, China)
Abstract: This paper studies how to improve the accuracy of speed detection for electric bicycles. On the one hand, the Hall signal of the electric bicycle driving motor is filtered and reshaped, and the signal period is accurately calculated by a Single-Chip Microcomputer to obtain the accurate motor speed. On the other hand, for electric bicycle drivers of different weights, the pressure generated on the wheels of the electric bicycle is different, which leads to differences in the actual running radius of the wheels. This paper adopts a manual input of the wheel radius to make the parameters of the wheel radius more accurate. The accuracy of electric bicycle speed detection has been greatly improved through the above two improvement measures. Thus, when the electric bicycle exceeds the speed limit, the reminder will accurately issue an overspeed alarm, thereby reducing the occurrence of traffic accidents.
Keywords: electric bicycle speed; reminder; electric bicycle speed accuracy; electric bicycle
0" 引" 言
随着人们生活水平的日益提高,2021年我国电动自行车、电动摩托车、电动汽车合计保有量突破3.95亿辆[1]。但现有电动车自行车在出厂只安装了限速器,并且车速表显示的车速准确度低,且没有超速报警提示功能。本文将对如何提高电动自行车车速检测的准确度进行了研究。通过对电动自行车驱动电机霍尔信号滤波整形,精确计算出信号周期,进而得出准确的电机转速;同时针对不同体重的电动自行车驾驶员,对电动自行车车轮产生的压力不同,进而导致轮子实际运行半径的不同,采用手动输入车轮半径的方式,使得车轮半径的参数更加精准。通过以上两个改进措施大大提高了电动自行车车速检测的准确度。从而当电动车速度超过25 km/h时,准确的发出超速报警,从而减少交通事故的发生。
1" 国内外现状
我国在2018年12月28日发布了国家推荐性标准GB/T 37153—2018《电动汽车低速提示音》[2],要求电动汽车在低速行驶时(20 km/h以下)必须向车内、外人员发出适当提示性声响,并于2019年7月1日起正式实施[3]。欧盟也规定,自2019年7月1日开始,在欧盟出售的电动汽车(包括所有全新的以及所有现有的电动汽车)都必须在2021年之前安装噪声发生装置(车辆声学警报系统AVAS,也称电动汽车低速行驶提示音系统),并且时速在20千米以下时就会自动启动。时速在20千米以上时,车胎和风噪声足以警醒路人车辆在靠近[4]。但由于我国的标准为推荐性标准,并且只针对电动汽车,这就导致所有的电动自行车、电动摩托车以及绝大部分电动汽车没有提示音。
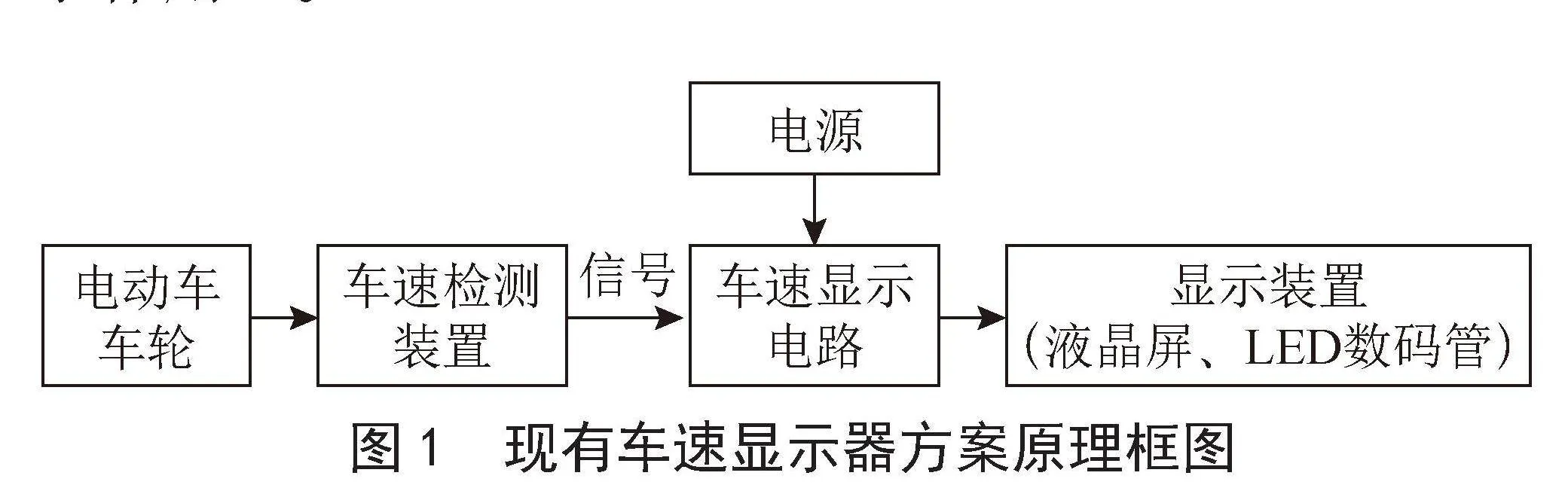
为了减少和避免该类事故的产生,现有技术方案将车速检测速器装在车轮上,实时检测车轮转速,输出一个模拟信号,车速显示电路将该模拟信号进行处理,转换成数字信号,最后通过显示译码器在显示装置(液晶屏、LED数码管)上显示出来[5]。如图1现有车速显示器方案原理框图所示。现有技术方案存在一些缺陷,比如:首先车速检测装置需要安装在车轮附近,固定困难,增加成本。其次车轮的颠簸,雨水污泥的侵蚀使得车速检测装置容易损坏或者产生误差,使得电路的不稳定性大大增加。最后该方案并不能给车辆驾驶员提供警示信号,所以无法起到安全提示作用[6]。
图1" 现有车速显示器方案原理框图
2" 智能电动车车速提示器系统设计
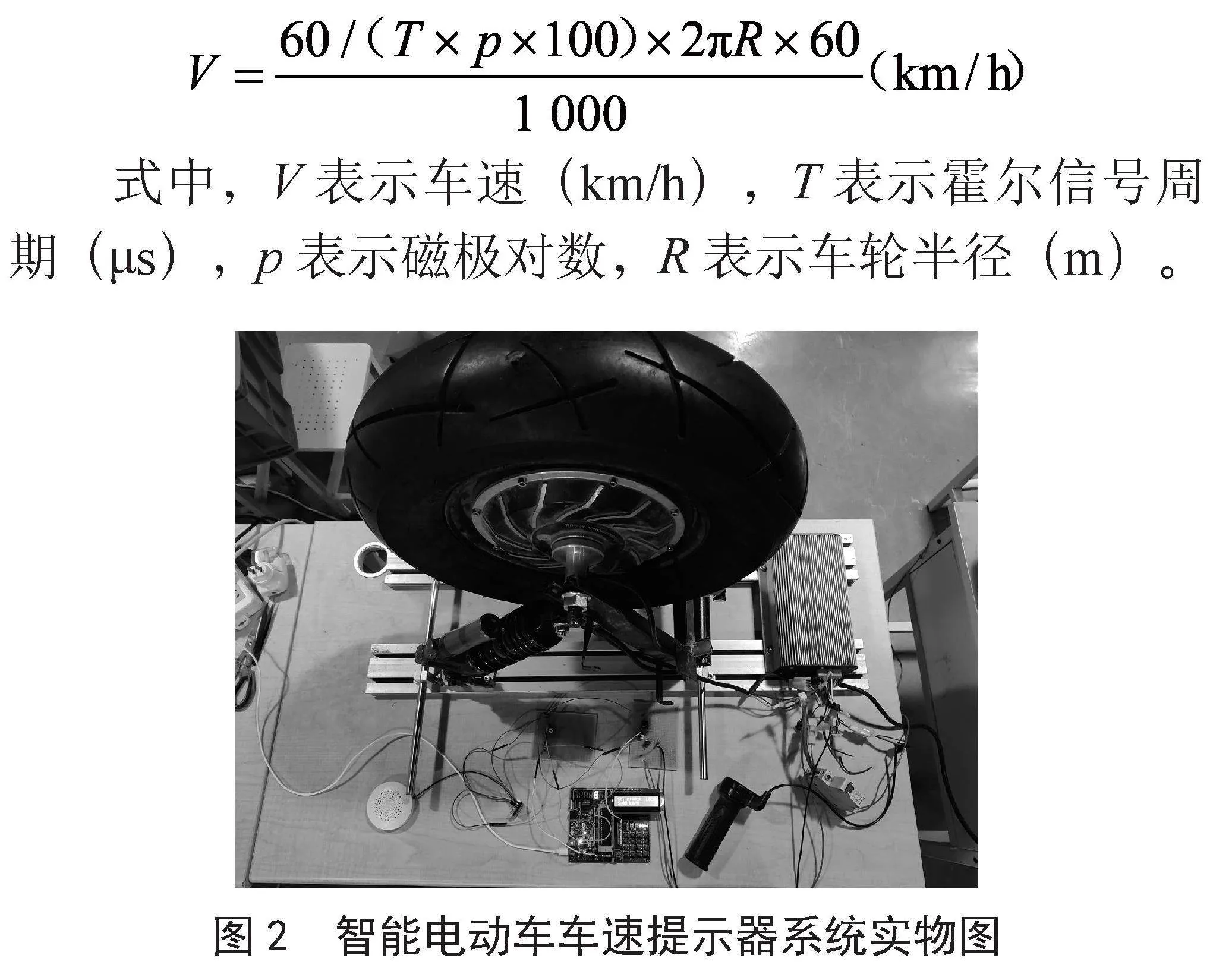
本发明“一种创新型的智能电动车车速提示器”(如图2智能电动车车速提示器系统实物图所示)利用现在电动车一般都采用的是直流无刷电机作为驱动电机,而直流无刷电机都拥有霍尔信号端。我们从霍尔信号端取出信号作为采样信号。通过将该信号滤波后接入单片机后检测出频率,再根据车轮半径,精确计算出电动车的车速。计算公式如下:
式中,V表示车速(km/h),T表示霍尔信号周期(μs),p表示磁极对数,R表示车轮半径(m)。
图2" 智能电动车车速提示器系统实物图
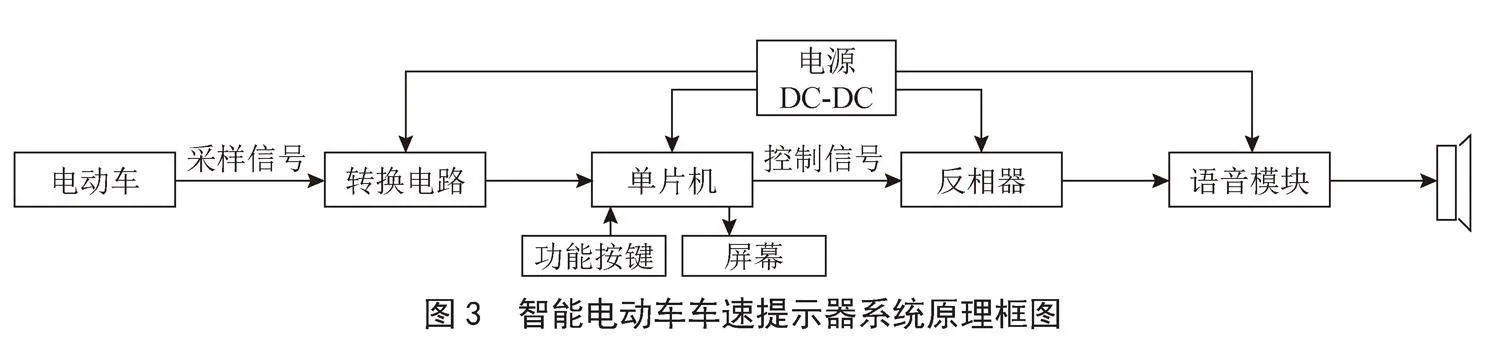
当车速超过国家规定的25 km/h时,单片机发出控制信号,控制语音模块播放超速提示声音。其原理框图如图3智能电动车车速提示器系统原理框图所示,智能电动车车速提示器系统有转换电路、单片机、屏幕、功能按键、反相器、语音模块、扬声器和DC-DC电源这几个模块构成。
2.1" 转换电路模块
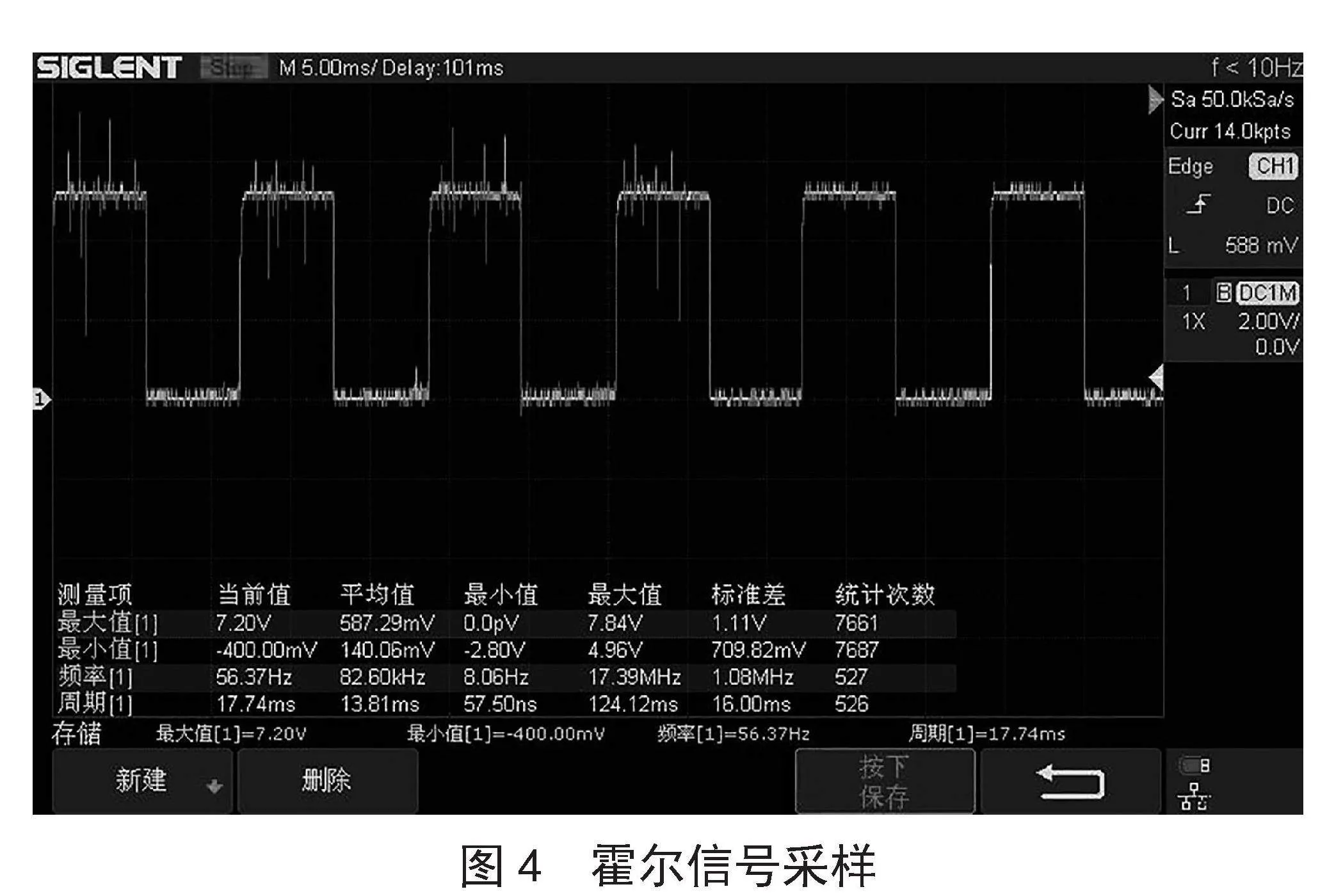
如图4霍尔信号采样所示,我们发现采样出的霍尔信号带有大量杂波这样是无法通过单片机检测出频率,进而无法计算出准确的车速。所以要通过转换电路的处理,滤除杂波。
图4" 霍尔信号采样
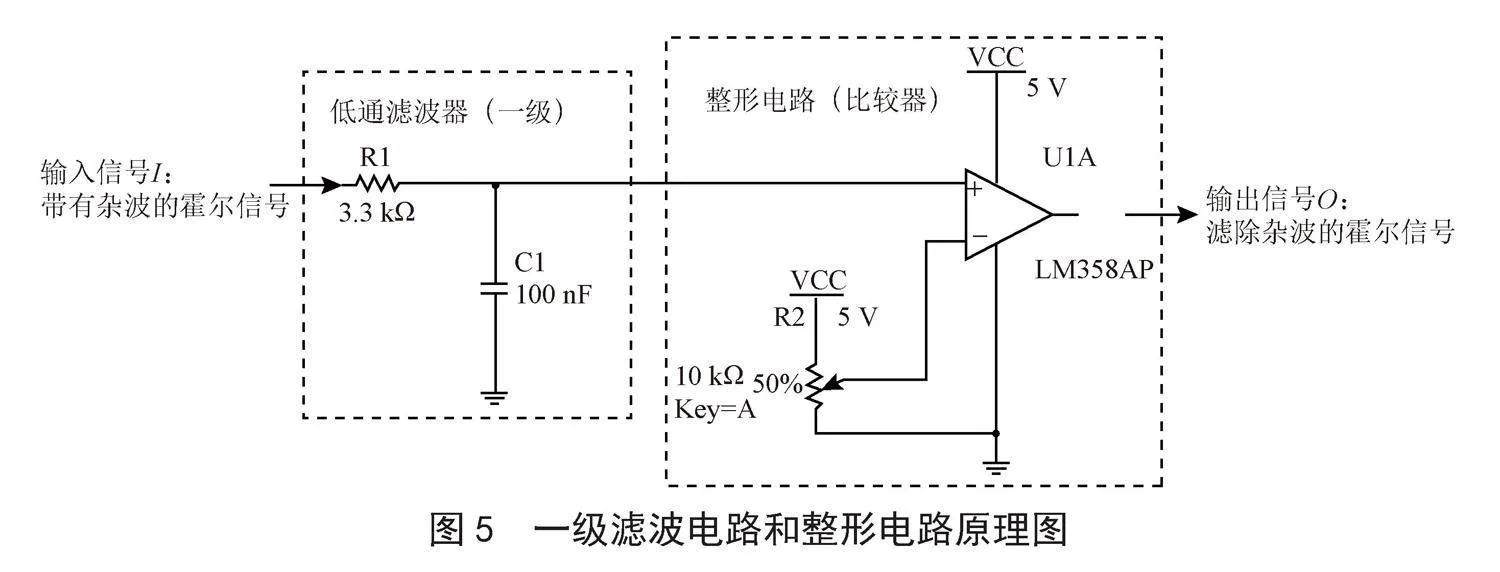
转换电路使用了一个一级RC滤波电路和一个整形电路进行滤波处理,如图5一级滤波电路和整形电路原理图所示。由于所用的是电动自行车的直流无刷电机,该电机具有23对磁极,故而轮子转一圈,霍尔信号端口会产生23个完整周期的方波信号,轮子转速越快该信号的周期越短,频率越高。根据本例的轮子直径,我们计算出最快车速下(大约30 km/h)频率约为200 Hz左右。故而滤波电路截止频率设置为482 Hz。
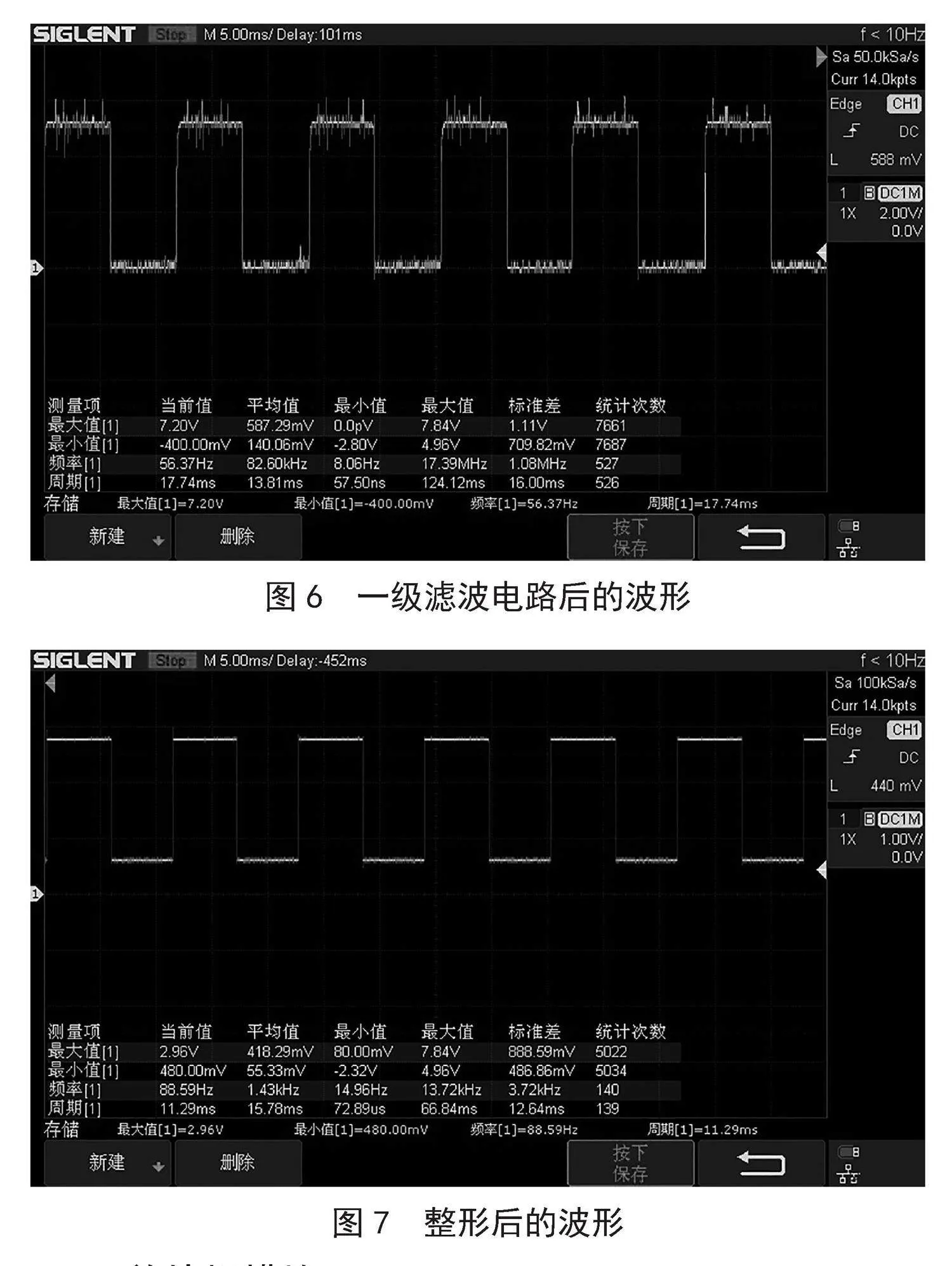
其中一级RC低通滤波电路选用了3.3 kΩ的电阻和100 nF的电容(通过公式f = 1/2πRC计算截止频率约为482 Hz),经过该电路滤波后仍有一部分杂波,如图6一级滤波电路后的波形所示。因此我们选择在一级滤波电路后接一个集成运放构成的比较器进行整形,这里采用了集成运放的非线性运用,我们在反相端接一个2.5 V左右的电压,当同相端电压高于反向端电压时,输出高电平。反之,输出低电平。最后输出一个滤除杂波后完美的方波,如图7整形后的波形所示。
图6" 一级滤波电路后的波形
图7" 整形后的波形
2.2" 单片机模块
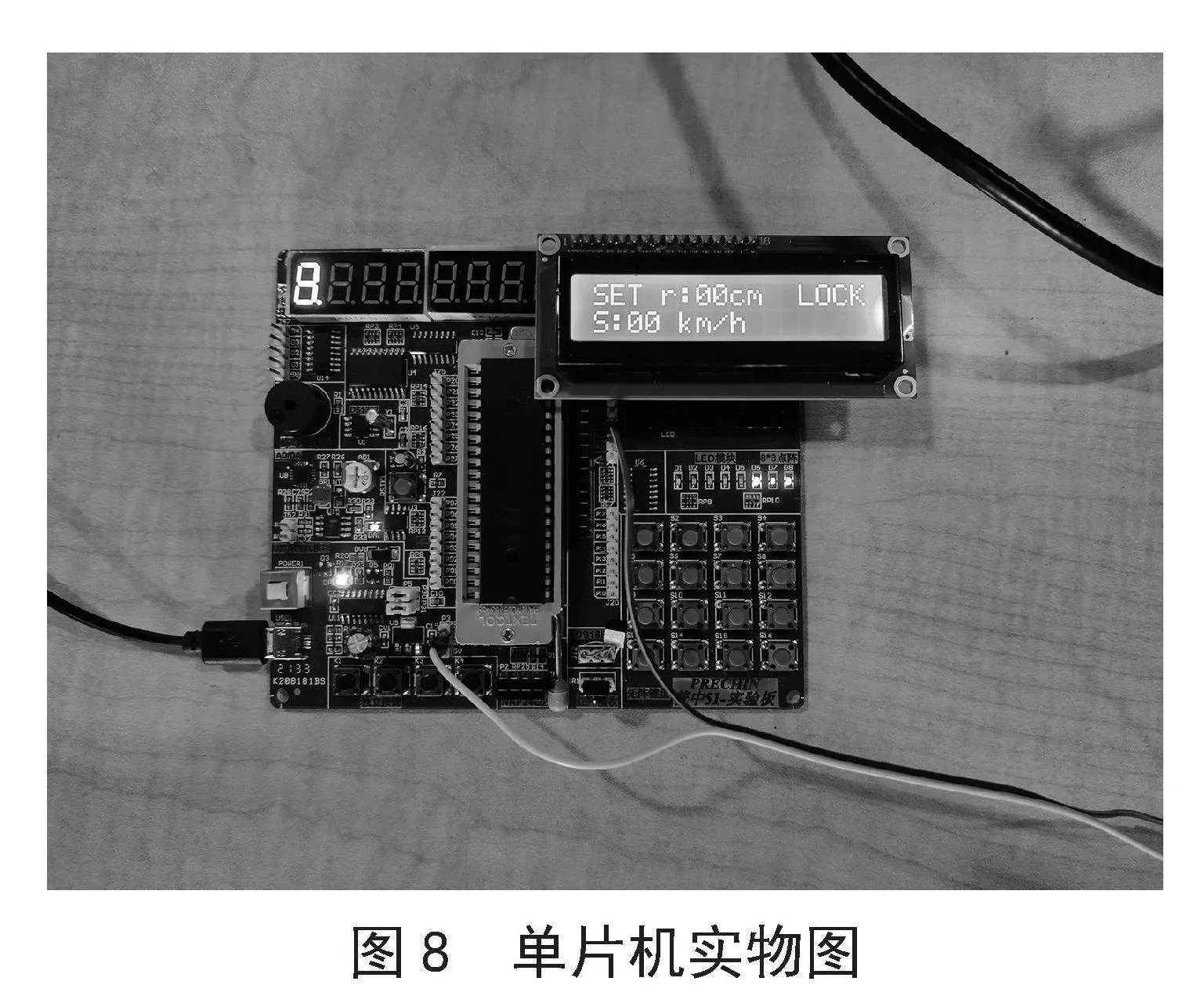
单片机模块中包含了经典的51单片机型号为STC89C52、数码显示屏和按键开关等,如图8单片机实物图所示。
图8" 单片机实物图
在本发明中单片机从P3.2口接收将转换电路转换好的信号,通过按键输入电动车轮子半径R,经过内部程序处理后显示实时车速,当车速超过国家规定的25 km/h时,则发出超速提示语音控制信号。具体端口及功能如表1单片机端口功能对照表所示。
表1" 单片机端口功能对照表
端口(引脚) 功能 备注
P3.2 频率检测输入 外部中断INT0
P3.1 半径输入锁定 独立按键K1
P3.0 半径数值增加 独立按键K2
P3.3 半径数值确认 独立按键K4
P2.7 LCD1602显示模块 LCD RS
P2.6 LCD1602显示模块 LCD WR
P2.5 LCD1602显示模块 LCD EN
P0.0 LCD1602显示模块 LCD D0
P0.1 LCD1602显示模块 LCD D1
P0.2 LCD1602显示模块 LCD D2
P0.3 LCD1602显示模块 LCD D3
P0.4 LCD1602显示模块 LCD D4
P0.5 LCD1602显示模块 LCD D5
P0.6 LCD1602显示模块 LCD D6
P0.7 LCD1602显示模块 LCD D7
P2.4 声音信号输出 接反相器
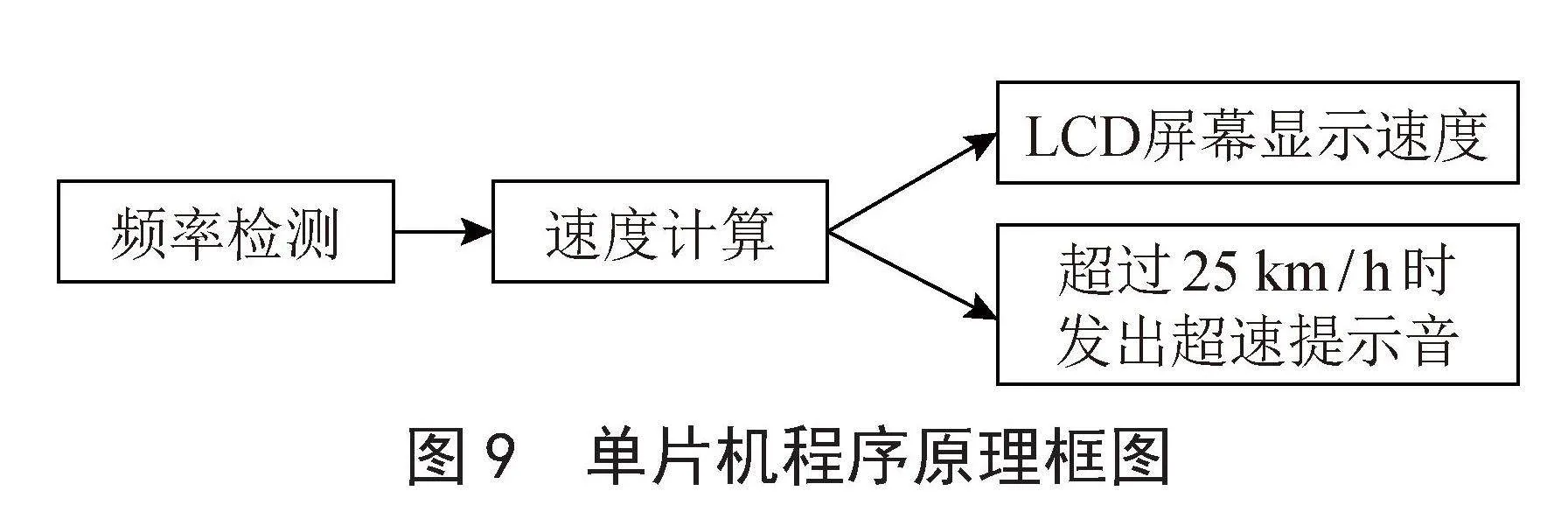
如图9单片机程序原理框图所示,单片机程序由频率检测、速度计算与显示、声音输出几部分组成。
图9" 单片机程序原理框图
频率检测需要用到一个定时器以及一个外部中断。程序开始运行时,通过设置定时器的初值运行定时器,每100 μs触发一次定时器中断,T0Count+1。在单片机INT0端口,即P3.2口,接入经过处理的脉冲信号。
接入单片机INT0口,为了使测量更加准确,通过设置IT0选项(外部中断0触发方式选择位)设为1,将外部中断0的触发方式为边沿触发方式。当INT0接收到脉冲的下降沿时,触发外置中断0,读取定时器0中的T0Count参数。当第二次检测到下降沿时,此时的T0Count与第一次下降沿T0Count值的差值,即为一个周期。
为了减少误差,使数据更加准确,通过检测5个周期时间的脉冲信号的时间,取平均值,得到单个脉冲的定时时间,该时间即为脉冲在一个周期情况下检测到的周期参数。同时在此时对T0Count做清零,并将参数赋值输出。以此循环,不断进行周期检测。
单片机通过频率检测,得到一个完整脉冲的周期时间。通过带入公式计算,最后可以得到实际对应的速度。从而在LCD屏幕上显示车速数值,再通过外接输出端,连接反相器驱动语音模块以及扬声器,当检测到车速超过国家规定的25 km/h,扬声器从而发出超速提示音。从而提示驾驶员自己以及周边的行人车辆。(以上发出的声音音量大小均在国家要求范围内,具体参考《中华人民共和国噪音污染防治法》国家标准GB3096—2015《环境噪音标准》)
2.3" 反相器模块
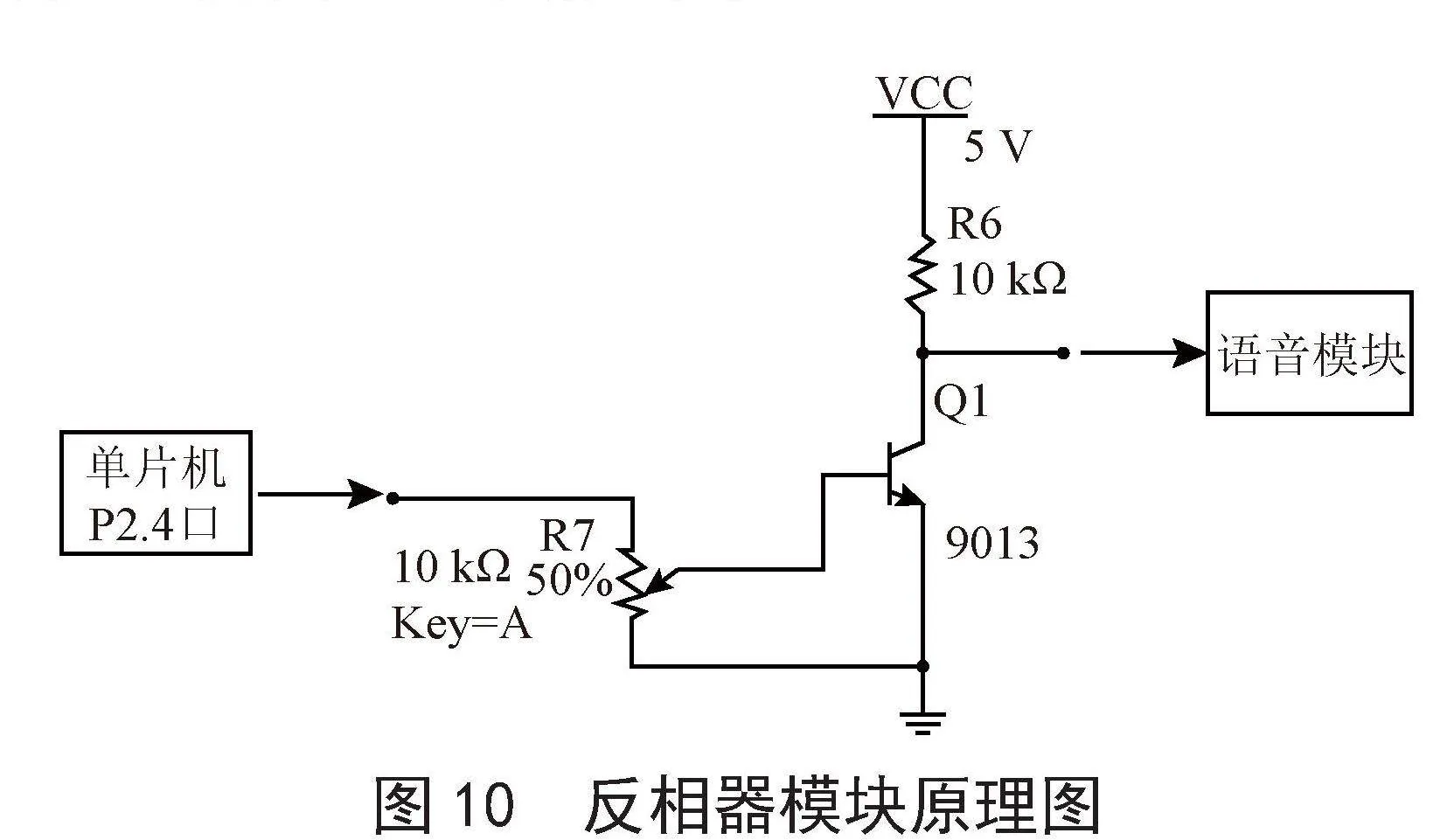
本模块由VCC(+5 V)电源、电阻R6和三极管9013构成开关电路,实现反相功能,其原理图如图10反相器模块原理图所示。
图10" 反相器模块原理图
由于语音模块是下降沿时触发其语音播报功能,同时为了防止出现开机就报警的误动作发生。所以在单片机P2.4输出端口接一个反相器进行信号转换及过渡。
本模块运行原理:当车速超过25 km/h时,单片机P2.4输出端口输出一个高电平(约4.8 V),三极管9013为导通状态,此时三极管发射极与集电极为接通状态,反相器输出端(语音模块输入端)为低电平,对地触发(下降沿触发)语音模块工作,播放超速提示音。当车速未超过25 km/h时,单片机P2.4输出端口输出状态为低电平(约0.7 V)时,三极管9013为截止状态,输出端为高电平,此时语音模块保持原状态不变。其中电位器R7起到降低输入电压的作用,因为单片机低电平输出电压为0.7 V左右,如不降压,则容易误开启三极管9013。
2.4" 语音模块
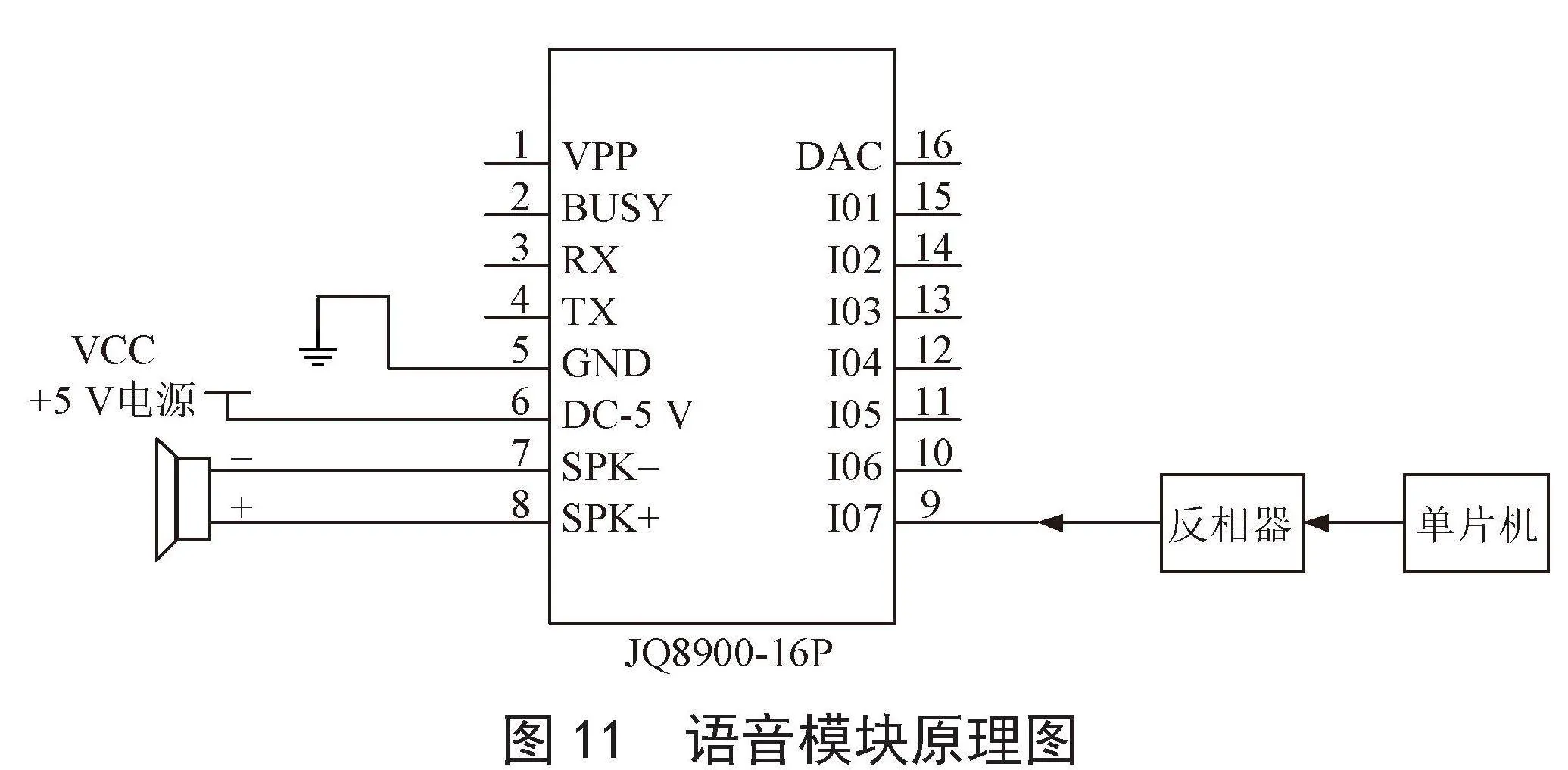
语音模块采用的是CZ3457(语音芯片模块定制音乐智能语音播报USB串口MP3识别模块JQ8900—16P),其原理框图如图11语音模块原理图所示。运用原理为语音模块在通电的情况下,I07端口(9号引脚)输入一个经过反相器处理的控制信号,来控制语音模块是否发出预先储存好的声音信号,最后通过SPK-端口(7号引脚)和SPK+端口(8号引脚)传输至扬声器进行功放。最后通过控制信号来决定:当车辆时速未超过25 km/h的情况下,语音模块未触发工作,车辆正常行驶。当车速超过25 km/h的情况下,语音模块因为控制信号而驱动,发出超速提示音。具体提示语音通过通信端提前录入芯片。
图11" 语音模块原理图
2.5" DC-DC电路模块
本发明中用到的DC-DC模块为8~60 V转5 V,它分别给转换电路、单片机模块和反相器供电如图12 DC-DC模块所示。
图12" DC-DC模块
2.6" 扬声器模块
扬声器接收功率放大器放大的信号(本扬声器为4 Ω的内阻),向外界播放电动车超速时的超速提示声音。如图13扬声器实物图所示。
图13" 扬声器实物图
3" 创新点
1)车速检测通过从无刷电机(电动自行车车轮)霍尔端提取转速信号,相比传统的安装车速传感器(编码器)的车辆,大大减少了硬件设备的投入,同时提高了稳定性。
2)不同体重,不同胎压会使得电动自行车车轮半径发生变化,从而使得显示的车速不准确。本发明通过手动输入车轮半径,提高了车速准确度,避免出现常见的“快乐表”,同时扩大了适用范围,适用于各种轮径的电动自行车。
3)在超速情况下,使用超速报警的提示语音替代了传统的“滴滴滴”的提示音,降低了驾驶人员的烦躁感,提高了安全性。
4" 结" 论
本发明能够大大的降低了电动车超速行驶事故的风险,并可以让驾驶员养成一个良好的驾驶习惯,保障电动车、行人的财产和生命安全,尽量使电动车因超速行驶而引发的交通事故率变低,保护自身安全的同时,也保护他人安全。此外该发明还有许多需要改进和优化的地方。我们会努力攻克难关,继续改进。
参考文献:
[1] 公安部网站.2021年全国机动车保有量达3.95亿 新能源汽车同比增59.25% [R/OL].(2022-01-12).https://www.gov.cn/govweb/xinwen/2022-01/12/content_5667715.htm.
[2] 曹斯敏.城市交通路口电动汽车低速行驶的提示声音设计研究 [D].广州:华南理工大学,2020.
[3] 高岳.安静行驶车辆低速提示音标准法规国际状况及发展趋势分析 [J].科技创新与应用,2013(19):44-45.
[4] 常晏宁,谢东明,彭伟强.倒车提示音标准与相关车外提示音标准对比分析 [J].标准科学,2022(3):76-80.
[5] 苏辉,刘琳,王震武,等.电动自行车车速提示音测试方法及测试结果影响因素分析 [J].摩托车技术,2022(2):38-44.
[6] 刘琳,吉文博,苏辉,等.电动自行车产品车速提示音检测现状和整改技术研究(1) [J].摩托车技术,2022(6):39-42.
[7] 朱彬,张军.基于连续转速样本的发动机音效实时合成方法 [J].计算机应用研究,2020,37(S2):123-125.
[8] 陈成,朱廉洁,陆楠.运动感排气声合成技术在纯电动汽车上的应用 [J].汽车技术,2020(6):13-16.
[9] 王伟东.声音的特征分类在新能源汽车主动发声设计中的应用 [J].上海汽车,2020(3):6-9.
[10] 肖聪,卢俊辉,候群,等.基于电动车的冷机系统控制策略设计与研究 [J].北京汽车,2022(1):37-42.
[11] 沈林邦,谭龙,王子龙,等.电动汽车低速提示音室内试验研究 [J].客车技术与研究,2021,43(1):56-59.
[12] 夏小均,陈德兵.电动汽车低速提示音室内测试分析 [J].公路与汽运,2021(2):12-15.
[13] 李玉刚,彭伟强,常晏宁.我国汽车车外提示音相关标准浅析 [J].中国汽车,2021(5):52-57.
作者简介:钱少伟(1981.02—),男,汉族,江苏苏州人,高级讲师,教务处副处长,工程硕士,研究方向:电子与通信方向;诸俊帆(2005.05—),男,汉族,江苏苏州人,研究方向:电子与通信。