





摘 要:针对路面情况影响其裂缝主干提取效果的问题,基于中值滤波、直方图均衡化、非锐化掩模等图像处理手段,提出一种裂缝主干提取算法。与手动阈值分割算法、Otsu阈值算法和最大熵阈值分割算法的对比结果表明,此算法能够有效提取裂缝主干区域,减少图像噪点数量,对提高路面裂纹提取算法的抗干扰性具有重要的指导意义。
关键词:图像处理;裂缝识别;滤波去噪
中图分类号:TP301.6;TP39 文献标识码:A 文章编号:2096-4706(2024)15-0104-05
Research on Road Damage Recognition Algorithm Based on OpenCV
WEI Zirou, CHEN Guohua, GAO Zhenshan
(Shijiazhuang Tiedao University, Shijiazhuang 050043, China)
Abstract: A crack backbone extraction algorithm is proposed based on image processing techniques such as median filtering, histogram equalization, and non-sharpening masks to address the issue of road surface conditions affecting the effectiveness of crack backbone extraction. The comparison result with manual threshold segmentation algorithm, Otsu threshold algorithm, and maximum entropy threshold segmentation algorithm shows that this algorithm can effectively extract the crack backbone area, reduce the number of image noise, and have important guiding significance for improving the anti-interference performance of road crack extraction algorithm.
Keywords: image processing; crack recognition; filtering and denoising
0 引 言
我国现有公路里程已经达到500多万千米,但现有路面状况评估方法基本分为手动、半自动[1-2]。在长距离道路损伤检测时,面临数据量庞大的问题,导致检测的人工成本和时间成本较高。因此,许多研究机构和企业致力于道路裂缝检测的研究和开发。
孙向鹏[3]的研究重点为图像处理技术的应用,特别是利用Grunwald-Letnikov分数阶微分法进行图像预处理,这种方法有助于突出路面裂缝的主要特征。尽管这种方法能够有效提取裂缝的主干,但它在区分裂缝与非裂缝的阴影区域方面存在局限性,导致处理后的图像中仍可见较多的噪声。程彬[4]通过结合同态滤波增强和BP(反向传播)神经网络技术来识别公路路面裂缝。同态滤波增强用于调整图像的光照分布,而BP神经网络则负责从经过处理的图像中提取特征,用于裂缝的有效识别。但是裂缝提取存在一些局限性,BP神经网络的性能在很大程度上依赖于训练数据的质量。如果数据存在噪声或者不完整,可能会导致网络训练不充分或过拟合。刘爱辉[5]致力于图像质量的改善,通过对比度增强和高斯滤波来提升图像像素的质量。同时还使用中值滤波算法进行降噪,并结合Prewitt算子和Otsu阈值分割算法对图像做进一步的分割处理,但当光线较差时,其阴影区域的灰度值和裂缝的灰度值相近,容易造成误判的情况。He等[6]致力于弥补传统阈值分割算法的不足,提出一种基于阈值的分割方法。将多阈值平均和多向数学形态学相结合,分别采用Otsu方法、最大熵方法、最小误差方法和最小偏差方法计算出四个阈值,并平均四个阈值,将它们的平均值作为最佳分割阈值,运用多方向morp hology做进一步的修复和细化,最终得到所需的裂纹二值图像。但此方法仍然存在噪点,难以完全体现裂缝主干图像。上述算法都存在对裂缝噪声抑制能力差、光照依赖性高等问题。
因此,本文针对路面情况影响其裂缝主干提取效果的问题,采用中值滤波对图像进行去噪处理;利用直方图均衡化和非锐化掩模锐化增强图像的对比度;基于闭合区域填充原理降低路面对其裂缝主体的干扰;利用开闭运算来除去小面积区域从而提取裂缝主干。相比于Otsu阈值分割算法和Prewitt算子分割法,此算法能够降低路面区域对裂缝提取的影响。
1 道路损伤识别方法
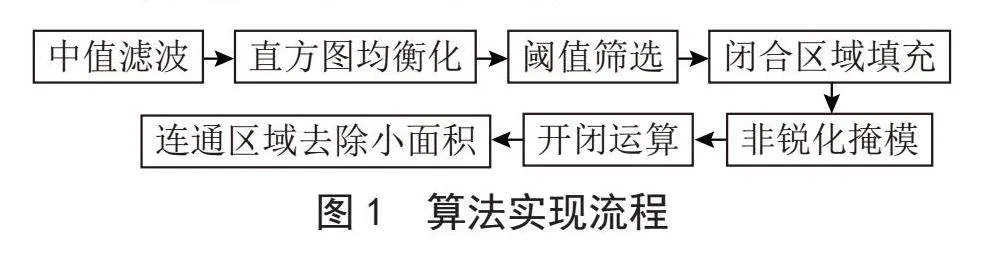
针对不同路面区域对其裂缝提取产生的干扰问题,设计一种裂缝主干提取算法,其流程如图1所示。首先,利用中值滤波对图像进行去噪处理。中值滤波通过将像素值替换为邻域像素的中值实现去噪效果,以减少图像中的噪点和干扰[7]。然后利用直方图均衡化,增强图像的对比度。直方图均衡化可以使图像中的亮度更均匀,从而突出裂缝的细节。通过调整像素值的分布,调节图像阈值,将图像中的像素分为裂缝和背景两部分。基于闭合区域填充原理填补图像孔洞,使裂缝区域更加完整。然后利用非锐化掩模增强图像对比度,除去路面干扰。通过开闭运算提取裂缝的主要区域。最后,运用连通区域检测算法去除小面积区域,从而得到完整的裂缝区域。
1.1 中值滤波
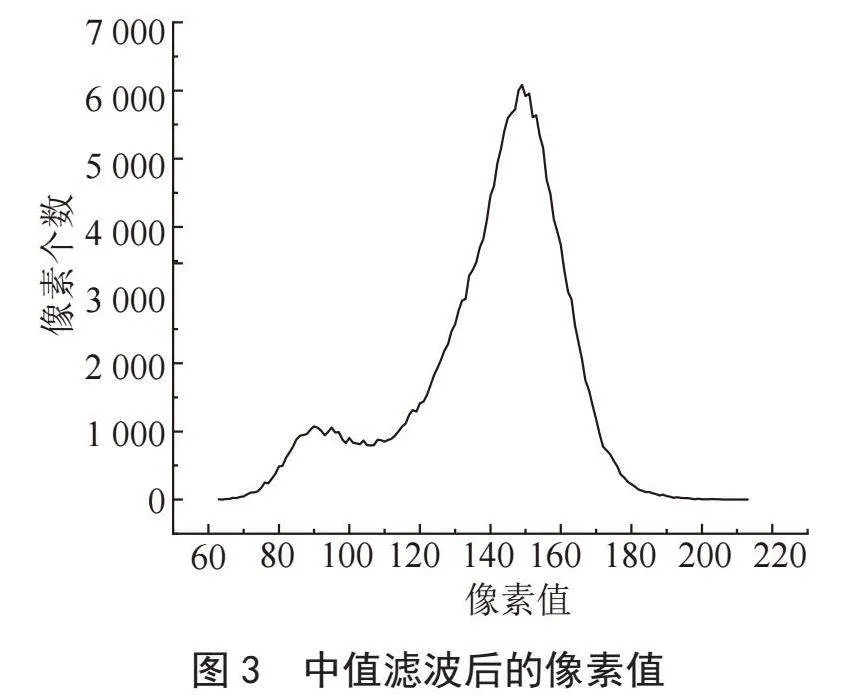
噪点通常会导致图像的亮度发生变化或颜色出现偏移,从而干扰裂缝的识别和提取。中值滤波可以在指定区域内对像素值进行排序,选择中间像素值作为像素中心点的替代值,从而减少噪点。由于裂缝通常具有明显的边界和明亮度变化,中值滤波能够在减少噪点的同时保持这些特征,从而保留裂缝的主体结构,如图2所示。中值滤波后像素点与像素值的关系曲线如图3所示。
但是中值滤波并不能完全消除所有噪点,尤其是在噪点密集或噪声与裂缝特征相似的情况下更是如此。因此,需要结合其他图像处理方法,进一步改善裂缝主体结构的保留效果。
1.2 直方图均衡化
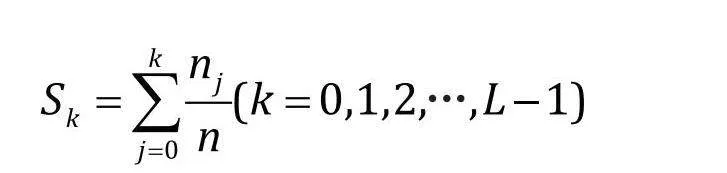
在图像处理过程中,由于光照不均或相机曝光设置不当,使得裂缝的细节不能很好地展现出来。因此,需要对图像进行增强对比度处理,使得像素值更加均匀地分布在整个灰度范围内[8]。直方图均衡化是一种增强图片对比度的方法,即通过累积分布函数将一张图片的直方图分布变成近似均匀分布,从而增强图像的对比度,突出裂缝的细节[9]。通过扫描整幅图像的像素,计算出整幅图像的灰度直方图,利用累计函数得到一个映射关系,从而得到最终的图像。其函数表达式如下:
式中,Sk为当前灰度级经过累积分布函数映射后的值;n为图像中像素的总和;nj为当前灰度级的像素个数;L为图像中的灰度级总数。
直方图均衡化结果如图4所示。
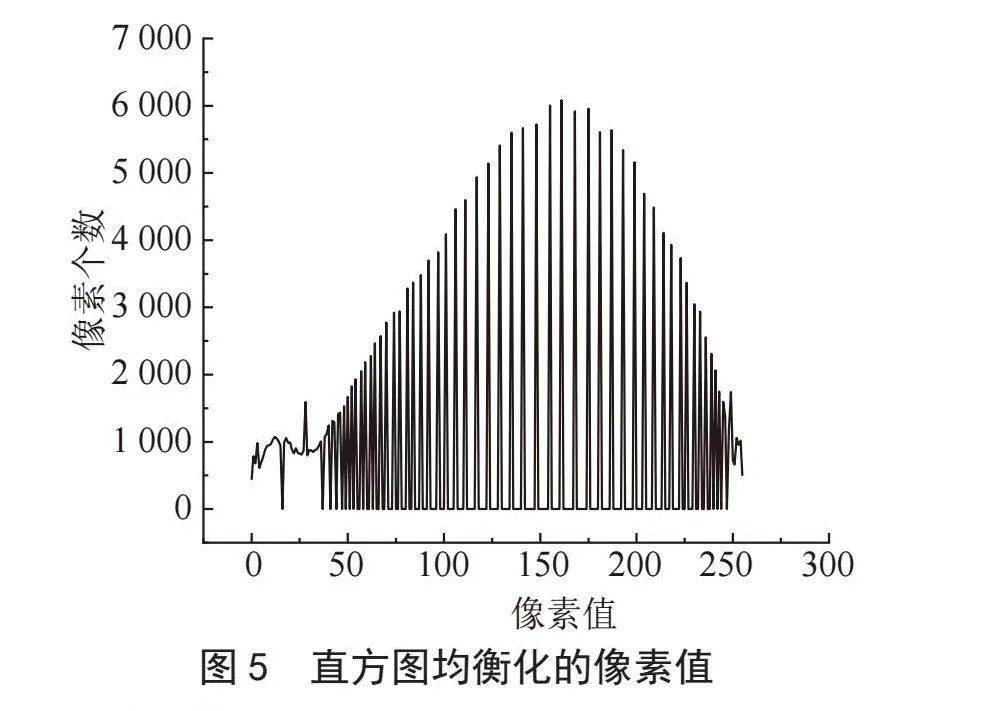
因为直方图均衡化会扩展像素值的范围,使得原本相对较低的像素值也被拉伸到更高的范围,使裂缝的颜色变得更深,裂缝主干更加凸显,但与此同时也增加了噪点的像素值。直方图均衡化像素点与像素值的关系曲线如图5所示。
1.3 调节阈值
针对直方图均衡化后出现的噪点,对灰度图像进行阈值调整[10]。为了方便图像处理,本文选用的手动选取阈值法,即通过选择一个适当的阈值来实现这种分割。首先选择一个合适的阈值,然后将图像中的像素值与该阈值进行比较。如果像素值大于阈值,将像素设置为白色;如果像素值小于或等于阈值,将像素设置为黑色。通过这种方式,将图像转换为二值形式,然后在原图像上进行区域填充,使图像的背景和裂缝分割明显。
1.4 闭合区域填充
闭合区域填充[11]是指将一个闭合区域内的所有像素都填充为指定的颜色或值。本文选用的是闭合区域填充中的种子填充算法,即洪泛填充算法,它基于种子点的选择和颜色的比较,将特定区域内的像素填充为指定的颜色或值。其基本原理为:选择一个种子点作为起始点(种子点通常是待填充区域内的一个像素)。比较种子点的颜色和目标填充颜色。如果二者相同,表示该像素已经填充过,无须再处理。如果种子点的颜色与目标填充颜色不同,则将种子点的颜色修改为目标填充颜色,并将其标记为已填充。递归或使用栈等数据结构,从种子点开始遍历其相邻像素。对于每个相邻像素,比较其颜色与种子点的颜色。如果相同且未填充,则将其颜色修改为目标填充颜色,并将其加入遍历队列中。重复比较颜色与种子点颜色,直至遍历队列为空。
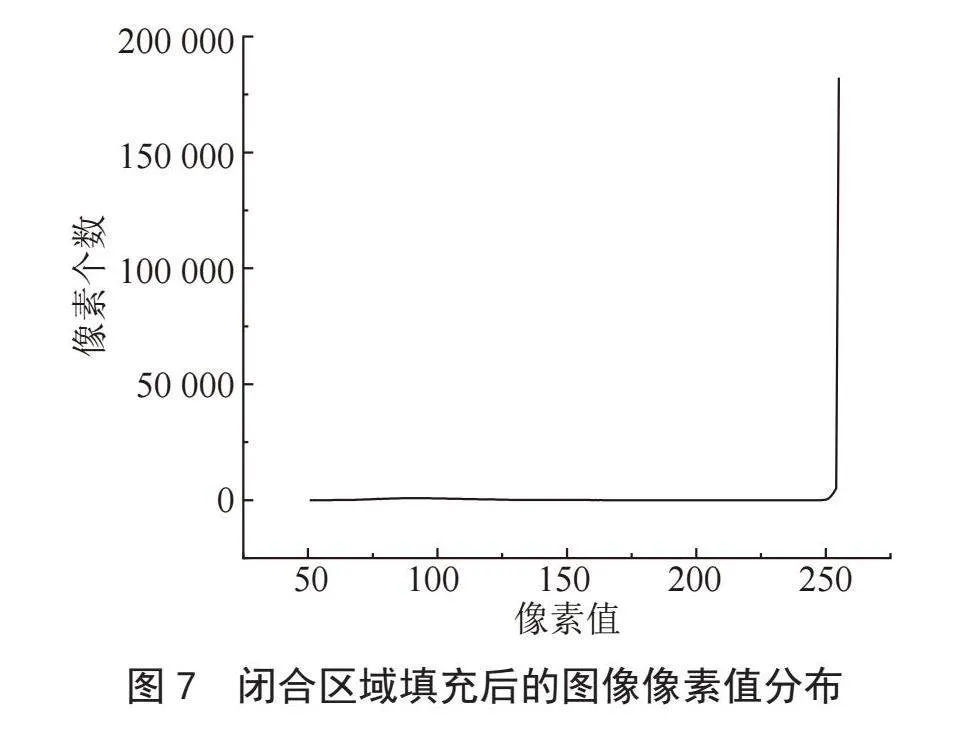
本文对闭合区域填充的颜色为白色,这样将会减少图像中的黑色噪点,并且可以在原图上完整保留裂缝的形状,但此时路面和裂缝区域相混合,如图6所示。其图像像素值分布如图7所示。
根据图7的观察结果可以发现,经过闭合区域填充后,图像中的主要部分具有较高的亮度值,并且在灰度范围内接近最大值。这表明图像中存在一些明亮的元素或特征,而其他区域则相对较暗。需要调整图像的对比度和亮度,增加像素值之间的差异,以使图像中的细节更加清晰可见。
1.5 非锐化掩模
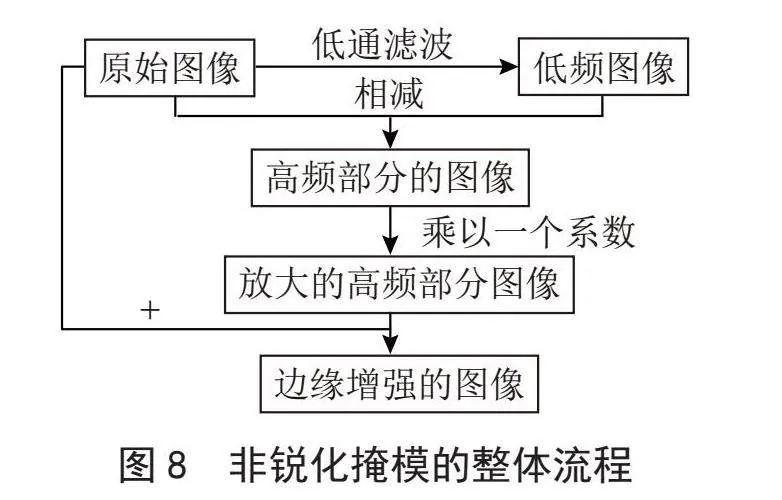
经过连通区域闭合后,路面背景和裂缝相混合。此时采用非锐化掩模对图像进行锐化,去除路面上的非裂缝区域,使裂缝轮廓更加清晰[12]。其主要过程如图8所示,首先利用低通滤波器使高频成分受到抑制,从而得到一个低频图像。其次,将原始图像与低频图像相减,得到被抑制的高频分量。再次,通过放大这些高频分量,将其恢复到原始图像的尺度。最后,将放大后的高频图像与原始图像进行叠加,得到锐化后的图像。锐化图像如图9所示。
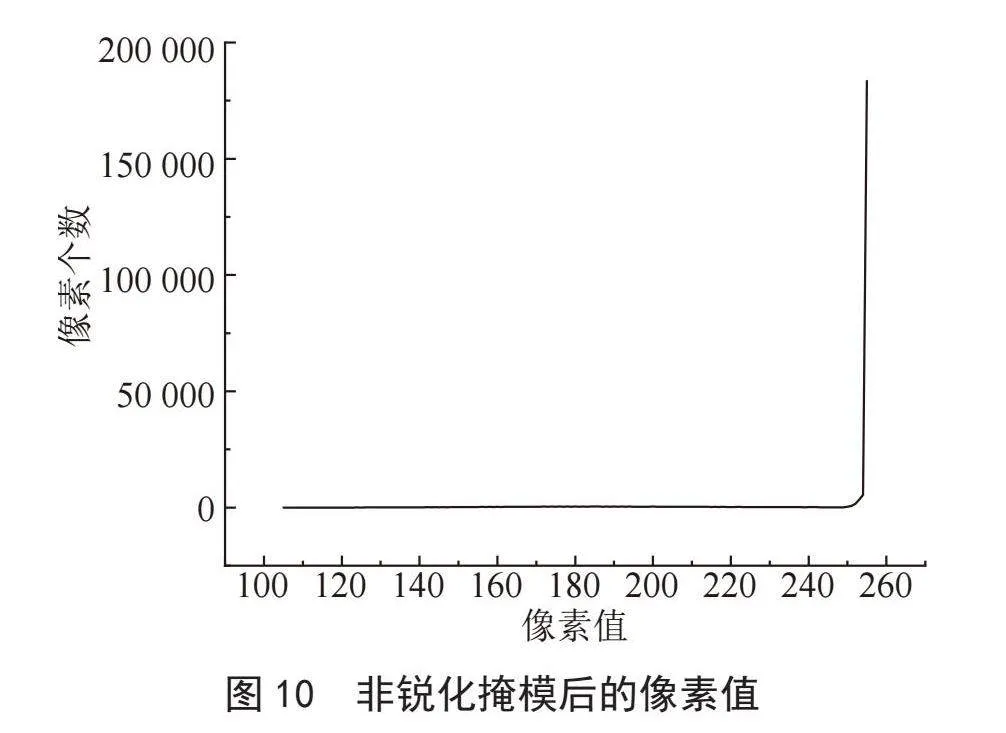
此时的图像仅保留了裂缝的主干结构,但是周围依然存在一些噪点。非锐化掩模后的图像像素值如图10所示。
根据图9、图10的观察结果得出结论:经过非锐化掩模操作后,裂缝主干的像素值固定为一个特定的值,其他区域则被抑制,从而只保留了裂缝的像素子集。这种处理方式有助于突出裂缝区域的细节,使其更加清晰可见。
1.6 连通区域检测除去小面积区域
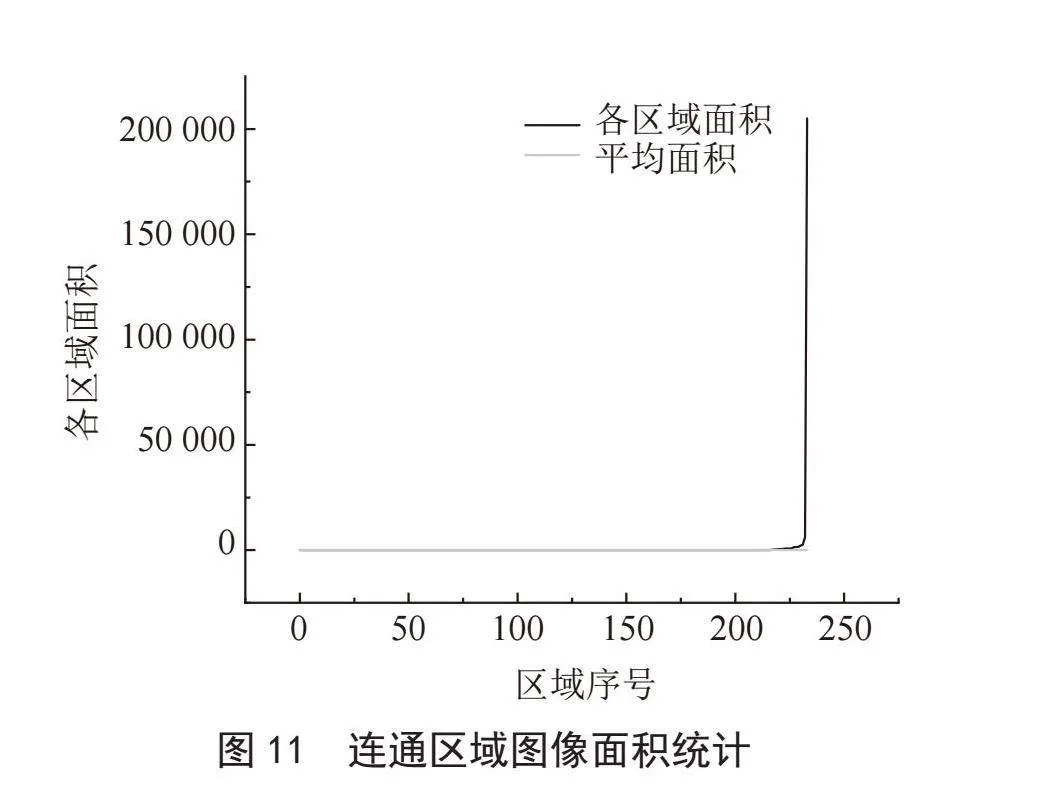
为进一步提取裂缝主干,本文选用八邻域的中值来去除噪点部分。连通区域是指具有相同特征或属性的像素在空间上相互连接形成的区域[13]。其中八邻域连接考虑像素的上、下、左、右四个邻域以及像素的四个对角邻域。根据图11所示的连通区域面积统计结果,通过计算这些连通区域的平均值筛选出路面裂缝的主干。具体方法是,将所有连通区域的面积相加,然后将总面积除以连通区域的数量,得到连通区域面积的平均值。最后筛选掉那些面积小于平均值的连通区域,从而得到最终的路面裂缝主干。
由图11可知,在233个连通区域中,有93%的区域面积小于像素的平均值,因此将其判断为噪点区域。而仅有17个区域面积大于平均值,将它们判断为道路的裂缝主干。
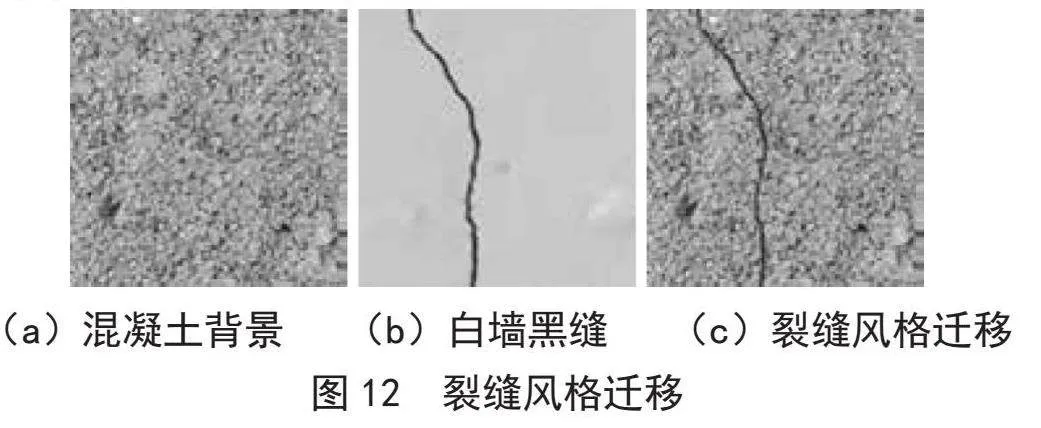
通过比较每个连通区域的面积与区域面积的平均值,可以将噪点区域和道路裂缝主干进行有效区分。提取裂缝结果如图12所示,此时已除去路面上的噪点,最终保留裂缝主干。
2 路面裂缝仿真及其结果分析
2.1 路面裂缝仿真设计
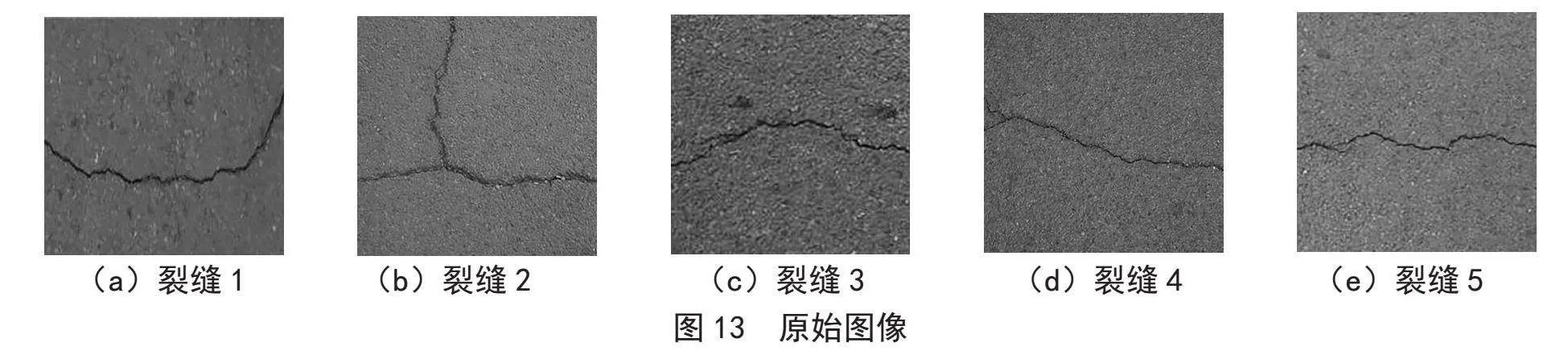
选用PyCharm+OpenCV 4平台进行系统仿真,实现对裂缝图像的采集、输入,以及对裂缝特征的提取,并选用了5幅不同情况下的道路裂缝图像对此算法结果与Otsu阈值算法、手动阈值分割算法和最大熵阈值分割算法进行对比,如图13所示。
2.2 仿真结果分析
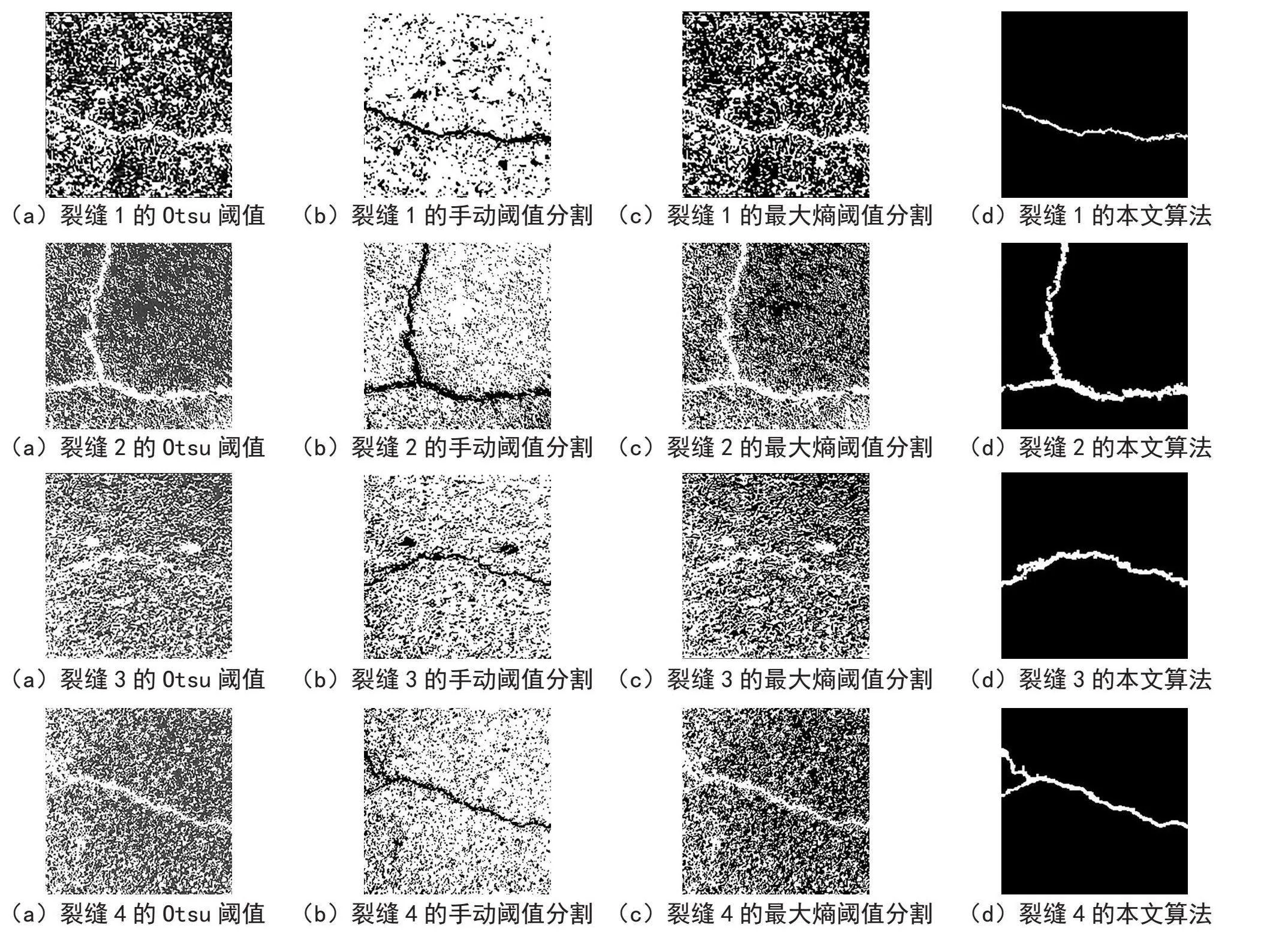
本文对比了不同算法的提取效果,提取结果如图14所示。
由上述对比图可知,Otsu阈值分割算法在提取裂缝主干时极易受不同地面情况的影响,无法准确捕捉到裂缝的主要轮廓和形状。由于图像中存在大量的噪点干扰,造成其提取效果较差。采用手动阈值分割算法提取的裂缝主干图像存在许多噪点,并且在处理图像时无法正确地区分裂缝和阴影,这将导致阴影区域被错误地标记为裂缝,带来提取结果的严重偏差。最大熵阈值分割算法由于对图像噪声比较敏感,使图像的灰度分布变得不均匀,该算法在确定阈值上会有较大的误差,使得分割结果中存在噪点和分割边界不清晰的情况,进而影响分割结果的准确性。将上述算法与文中所应用的方法进行对比可知,本文方法能够较为准确地将裂缝主干和背景图像分割,得到区域完整且噪点少的二值化图像。因此,文中方法能够提供精确、可靠的裂缝提取结果。
3 结 论
针对不同路面区域对其裂缝产生干扰的问题,本文提出一种裂缝主干提取算法,旨在提升图像对比度,降低道路背景对裂缝的影响。通过检验此算法得出以下结论:相比于传统的Otsu阈值分割、最大熵阈值分割等算法,本文算法对裂缝主干的提取效果更显著,降低了其他算法处理图像过程中对图像噪点的敏感性,能够有效解决不同道路区域对其裂缝主干的干扰问题。
参考文献:
[1] 张扬.基于图像处理的公路路面裂缝识别技术的研究 [D].昆明:昆明理工大学,2018.
[2] 肖靖.道路裂缝识别算法研究 [D].北京:北京邮电大学,2009.
[3] 孙向鹏.基于图像处理的高速路面裂缝识别技术研究 [J].交通世界,2022(33):86-88.
[4] 程彬.基于BP神经网络的公路路面裂缝识别技术 [J].交通世界,2023(12):35-37.
[5] 刘爱辉.公路路面裂缝图像识别技术研究 [J].交通世界,2022(31):27-29.
[6] HE Y Q,QIU H X.A Method of Cracks Image Segmentation Based on the Means of Multiple Thresholds [J].通讯和计算机:中英文版,2012,9(10):1147-1151.
[7] 张永飞,邓辉.一种基于自适应中值滤波的各向异性扩散滤波的图像去噪算法 [J].装备制造技术,2023(11):18-22.
[8] 唐军,秦艳霞,林玲,等.多尺度融合与细节突显的水下视觉图像增强算法 [J/OL].机械科学与技术,2024:1-8[2024-07-10].https://doi.org/10.13433/j.cnki.1003-8728.20240044.
[9] 雷明,李擎,朱希安,等.多步态SVM分类且自适应阈值的行人定位方法 [J].传感技术学报,2021,34(7):911-918.
[10] 罗明帅,董彩虹,王晓天,等.基于边缘跟踪的闭合轮廓快速填充算法研究 [J].交通世界,2023(16):2-5.
[11] 魏海斌,武少威,张启帆,等.基于图像处理的沥青路面裂缝识别算法研究 [J].中外公路,2020,40(4):73-78.
[12] 冯策,戴树岭.一种改进的非锐化掩模深度图像增强算法 [J].哈尔滨工业大学学报,2014,46(8):107-112.
[13] 张子原.变电站小目标检测识别关键技术研究 [D].成都:西南交通大学,2022.
作者简介:魏子柔(2003—),女,汉族,河北辛集人,本科在读,研究方向:机器识别、图像处理;陈国华(1985—),男,汉族,河北石家庄人,讲师,博士,研究方向:动力机械强度与可靠性;高振山(1981—),男,汉族,河南新郑人,讲师,博士,研究方向:齿轮的先进设计及制造技术、齿轮的精密塑性成形理论与工艺。