摘" 要:直流电机系统在高速运行下容易对电子传感器测量产生干扰,导致输出稳定性不强。文章提出一种基于滑动滤波器算法结合模糊自适应PID控制算法的直流电机调速策略。首先利用模糊PID控制器提升非线性系统的控制精度和鲁棒性;其次利用滑动滤波器的滤波功能,实现对测量过程中噪声干扰进行滤除,从而提高电机输出平稳度;最后在MATLAB中的Simulink模块建立整个系统的控制模型,并验证了这种改进控制策略的可行性以及优越性。
关键词:直流电机;滑动滤波;模糊控制;Simulink
中图分类号:TM33" " 文献标识码:A" 文章编号:2096-4706(2024)21-0025-04
Design of Speed Regulation Algorithm for DC Motor Based on Sliding Fuzzy PID Control
LIU Shuqi, DING Zhipeng, LIU Chenyi
(Jiangsu University of Technology, Changzhou" 213001, China)
Abstract: The DC motor system is easy to interfere with the measurement of electronic sensors under high-speed operation, resulting in poor output stability. This paper presents a speed regulation strategy of DC motor based on the sliding filter algorithm combined with the fuzzy adaptive PID control algorithm. Firstly, it uses the fuzzy PID controller to improve the control accuracy and robustness of the nonlinear system. Secondly, the filtering function of the sliding filter is used to filter noise interference in the measurement process, so as to improve the output stability of the motor. Finally, the control model of the whole system is established by the Simulink module of MATLAB, and the feasibility and superiority of the improved control strategy are verified.
Keywords: DC motor; sliding filter; fuzzy control; Simulink
0" 引" 言
直流电机是自动化系统中重要组成部分,可以在较宽的工作范围内稳定运行,可提供较大的转矩和过载能力,在自动化生产线中有广泛的应用[1]。在实际应用过程中直流电机普遍的控制方法是传统PID算法,它具有结构简单、稳定性好、运行可靠、调节方便等优点。但是智能设备在应用过程中负载变化可能是非线性的,使得PID调节参数困难以及输出响应速度较差的特点,为此许多学者提出模糊PID控制器[2],模糊PID控制器对参量进行自适应选定可以有效控制非线性负载同时提高响应速度,具有良好的鲁棒性等优点[3]。但在传感器测速中测量值带有干扰,会导致输出速度不够稳定,故可以在反馈过程中引入滤波器来降低噪声对控制器的干扰,滑动滤波器[4]是数字信号处理中常用的一种简单有效的滤波器。它通过计算数据点的一组连续样本的平均值来减少随机噪声。滑动滤波器广泛应用于数据处理、控制系统等领域,特别是在需要抑制短期波动的场合。滑动滤波器自适应模糊PID控制系统兼顾响应速度与输出平稳度的优点。
1" 模糊控制器设计
1.1" "PID控制器的设计
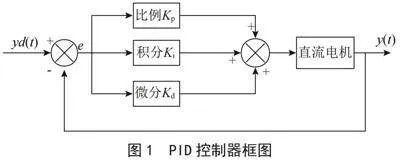
PID控制器框图如图1所示,由比例环节、积分环节和微分环节组成。可以通过调整这3个单元的增益系数Kp、Ki和Kd来调定其输出特性。连续域中偏差计算和输出特性分别为式(1)和(2):
(1)
(2)
图1中y(t)为PID的最终输出,yd(t)为输入数值,e(t)为误差值,可调整控制系统中,Kp为比例系数,用于调整输出与误差的线性关系;Ki为积分系数,用于解决系统的静态误差问题,确保系统最终达到期望值;Kd为微分系数,通过引入误差变化率,抑制系统响应的振荡。
对于PID控制器,其实际参数是在特定环境下经过优化后得到的,这些参数在很多线性、时不变系统中表现出色,但当面对非线性或时变系统时候,特别是一些受到不确定干扰的系统,固定参数的PID控制器可能就不再适用,这种情况下可以采取自适应模糊PID控制器,在一定程度上减小干扰对输出造成的影响。
1.2" "模糊PID控制器的设计
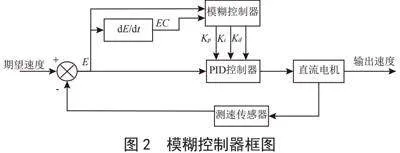
模糊PID控制器利用模糊逻辑进行控制决策,而不是依赖于精确的数学模型,这意味着它能够处理那些具有非线性、时变或不确定特性的系统[5],同时又能提高响应速度,模糊控制器利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点这种方法解决了普通PID自适应差的问题[6],其实现框图如图2所示。
模糊控制器的实现步骤主要有:误差量化、误差模糊化、参数模糊推理、获取参数值、输出控制一共5个步骤组成:
1)误差量化。输入速度和输出测量速度相减得到e作为控制器输入,在模糊化前需要现对e(偏差)以及ec(偏差变化率)进行量化处理。所谓量化就是通过量化函数将输入量映射到一定的数字级别,小车在运动时,会不断更新当前车速偏差与偏差变化率,其E和EC分为e、ec映射量化后结果。
2)误差模糊化。E与EC映射后,确定模糊子集[7]:负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB]这7个语言变量就能够有足够精度表达其模糊子集。定义E和EC的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。
3)参数模糊推理。根据E和EC的隶属度进行查表得到输出的大小程度[8],即NB、NS等,模糊推理的核心工作是建立推理表,表格若对应Kp的表格,通过查表格就可以得到Kp的隶属度,同理得到Ki、Kd的隶属度。
4)获取参数值。根据模糊推理得到的各参数输出的隶属度然后乘以对应隶属值算出输出值,然后根据自己设定每个参量的增益相乘得到KP实际数值,同理得到Ki、Kd的参数值。
5)输出控制。将得到参量值输入给PID控制器控制直流电机转速,模糊PID控制器实现了在线检测、响应速度快的优点,但是模糊控制器在实际使用过程中因为有其他噪声干扰影响,使得测量速度值有波动,导致最终输出速度不够平滑稳定。
1.3" "滑动滤波模糊PID控制器的设计
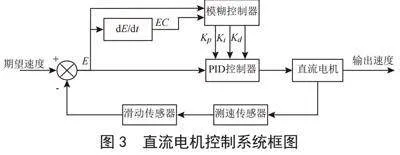
直流电机运动速度控制原理如图3所示,采用闭环的方式控制直流电机转速,前向控制部分采用模糊PID控制器,在后向反馈过程中对于传感器测量速度值进行滑动滤波处理。
在直流电机运行中,通过不断计算E和EC值来查看模糊规则表中的参数,自动选择最优的Kp、Ki、Kd数值,利用模糊控制器可以使得响应速度结果实现最佳结果,但是直流电机在实际使用过程中带有噪声干扰导致输出速度不够平滑稳定,因此设计出在反馈过程中引入滑动滤波器来平滑速度输出结果,这滑动种滤波器特别适用于处理随机噪声,因为它能够减少信号的随机波动,同时保留信号的基本趋势,这种改进措施可以提高精度又兼顾响应速度。
2" 系统建模与仿真分析
2.1" 滑动滤波器
滑动滤波器是在一定数量的样本窗口内计算平均值[9],并将此平均值作为当前点的输出之后窗口沿着采集数值移动时,重新计算窗口中数据的新平均值,从而得到平滑后的信号。滑动滤波器的计算式为:
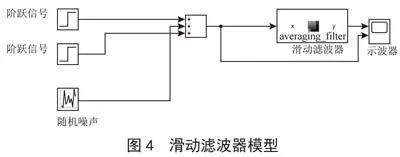
其中,x[n]为输入信号,(N)为滑动窗口的大小,则滑动平均滤波器的输为y[n]。在Simulink仿真中滑动滤波器模块实现方法是取7个连续采样值进行算术平均,每次新数据进入队列时,旧的数据会被舍弃,之后重新计算队列中所有数据的平均值[10],具体模型图如图4所示。
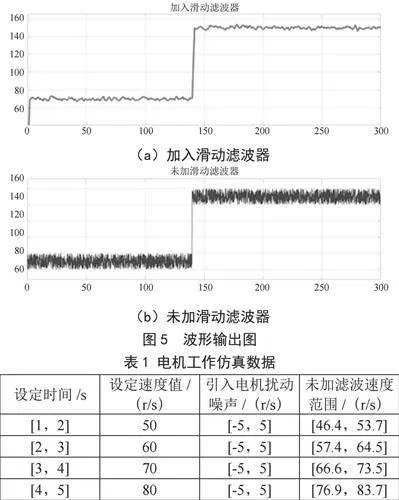
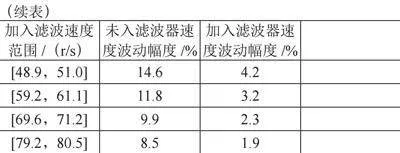
为了验证滑动滤波器使用的可行性,Simulink模型中的输入信号分别对应70ε(t)、80ε(t-140)的阶跃信号以及上下幅度在[-6,6]的随机噪声,之后把这3个信合叠加合成输出,用示波器1观察未加滤波器输出波形和用示波器2观察加入滤波器输出波形,仿真观察得到结果如图5所示。由图5可以明显看到加入滤波器后的输出结果更加平滑,噪声干扰影响明显减弱。表1为加入滤波器和未加滤波器输出电机速度对比图,可以看出未加滤波器时速度波动幅度在设定速度的9%左右,加入滤波器后仅仅3%,计算式为:
y = (max-min)/raw
其中,y为波动幅度,max与min为输出速度最大与最小值,raw为速度输入原始值,通过仿真波形图可以看出滑动滤波器对滤除干扰有很好的效果。
2.2" 滑动滤波模糊控制器
仿真中的模糊控制器是将速度偏差e输入模糊PID控制器中,对偏差e与偏差变化量ec进行量化处理后得到对应量化区间[-3,3],对每一个端点划分-3(NB)、-2(NM)、-1(NS)、0(ZO)、1(PS)、2(PM)、3(PB)。之后进行模糊化,通过三角隶属度公式得到对应当前e与ec的隶属度,若输入e经过量化后的值为E = 2.4,那么对应绿线与红线的值分别为0.4、0.6,这两个就是隶属度,隶属度也为概率,表示该输入属于PB 概率为0.6,而属于PM的概率为0.4,EC隶属度确定同理。之后进行模糊推理,通过E与EC组合分别查询Kp、Ki、Kd分别对应的模糊规则表,确定当前Kp的隶属度,若输入E为2.4,EC为0.6,则E的隶属度为0.6(PM)与0.4(PB),EC的隶属度为0.6(PS)与0.4(ZO)然后对E与EC的隶属度进行两两组合,并进行查表,得到下列结果:
0.24(NM) = 0.4(ZO)·0.6(PM)
0.76(NB) = 0.4(ZO)·0.4(PB)+0.6(PS)·0.6(PM)+0.6(PS)·0.4(PB)
同理得到Ki、Kd的隶属度,之后进行清晰化,通过Kp、Ki、Kd隶属度和隶属值相乘得到量化后分别对应的Kp、Ki、Kd参量。
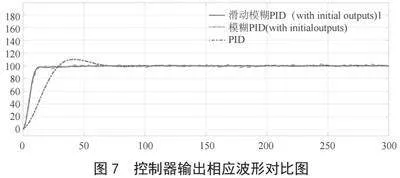
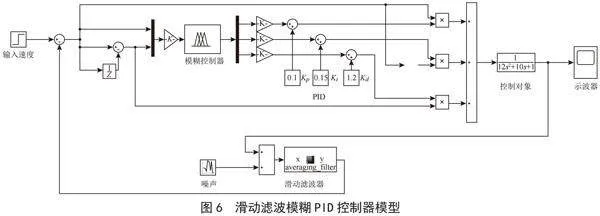
最后为了验证滑动滤波模糊PID控制器的可行性,使用Simulink构建滑动滤波模糊PID控制器模型如图6所示,设定输入期望速度为100 r/s的阶跃信号,系统每一轮控制更新时间为0.1 s,在电机输出时使用编码传感器测量得到输出速度大小,之后人为的引入10 MHz随机噪声来模拟电机运动时带来干扰,幅度变化范围为[-6,6],采样时间为0.1 s。把随机噪声与测量速度数值相加输入滑动滤波器内,得到的速度数值输出反馈到控制器上,从而进行下一轮控制量的更新,实验模型仿真中的直流伺候电机通过将基尔霍夫定律以及电流电压与转矩关系使用拉普拉斯变换得到仿真模型。将模糊控制器、PID控制器、输入参量、滑动滤波器、直流电机模型搭建成为一个系统,最终得到模型,图7所示为三种控制器输出的相应波形图,分析得到一个调试结论:在电机控制调节过程中,PID控制法所选用的各个环节的参数比较容易调得,波形相对稳定,超调量较大,调节时间稍长。模糊PID控制法所选用的各个环节的参数比较难以调得,不容易达到预计值。但是模糊控制法易去掉超调,调节时间较短,经过反复调试出现比较稳定、波动比PID控制法要小、无超调、调节时间较为短的输出波形,存在问题是在引入噪声干扰后,输出速度有一定波动。滑动滤波模糊PID控制器输出速度的稳定性和控制精度方面优于模糊PID控制器和传统PID控制器,特别是在存在噪声干扰的情况下,滑动滤波器的平滑作用将帮助模糊PID控制器更好地跟踪期望速度,减少超调和振荡,提高系统的整体性能。
3" 结" 论
基于直流电机系统具有时变性和耦合性强的特征,本文提出将模糊PID控制算法与滑动滤波器相融合,基于模糊规则进行PID算法的控制,提高闭环控制的鲁棒性,增强电机控制系统的响应速度,降低误闭环;滑动平均滤波算法对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差,促使系统稳定度提高,实验仿真使用MATLAB中的Simulink模块对三种控制方式进行仿真实验,验证了滑动滤波模糊控制器的优点与设计算法的可行性。
参考文献:
[1] 赵开理.基于单片机设计直流电机控制系统 [D].南京:南京邮电大学,2017.
[2] 赵政宏,乔栋,董志民,等.基于模糊PID的直流电机控制系统设计与仿真 [J].无线互联科技,2023,20(16):37-42.
[3] 周锐霖,雷成健,刘泽,等.基于模糊自适应PID算法的列车自动驾驶系统研究 [J].控制与信息技术,2023(3):34-38.
[4] 杨璇,李胜,邓君丽,等.滑动平均滤波器在数字控制中的改进 [J].电力电子技术,2014,48(9):68-70.
[5] 李庆春.新型PID模糊控制器的结构分析及应用研究 [D].长沙:中南大学,2010.
[6] 夏长亮,方红伟.永磁无刷直流电机及其控制 [J].电工技术学报,2012,27(3):25-34.
[7] 刘晓艳,宋浪,汪恂,等.基于粒子群优化模糊PID控制的水厂加氯系统 [J].市政技术,2024,42(3):198-205.
[8] 李晶.基于模糊PID的变幅液压缸伺服位置自适应同步控制技术 [J].液压气动与密封,2024,44(3):73-78.
[9] 宋佳儒,胡士强,杨永胜.基于滑动窗口滤波器的无误差累积位姿估计 [J].计算机仿真,2019,36(4):209-213+228.
[10] 潘志锋,王孝洪,吴春台,等.基于分数阶PID控制器和滑动平均滤波器的三相锁相环设计 [J].高电压技术,2022,48(11):4393-4402.
作者简介:刘舒祺(1979—),女,汉族,河南周口人,副教授,博士,研究方向:信号处理;丁志鹏(2001—),男,汉族,江苏徐州人:本科在读,研究方向:嵌入式单片机;刘晨艺(2002—),男,汉族,浙江温州人,本科在读,研究方向:嵌入式单片机。
基金项目:大学生创新创业训练计划项目(2023114630072)