



摘" 要:针对地面目标实时、精确定位问题,开展了多红外目标探测几何定位方法研究。在离线阶段,生成大量定位数据,利用极端梯度提升树方法构建两红外交叉定位精度模型。在实时定位阶段,首先,文章将三个红外传感器两两组合进行测向交叉定位,计算出每组交叉定位坐标;其次,调用精度模型,通过输入每组红外的基线信息和方位角信息获取对应的红外交叉定位精度;最后,结合交叉定位坐标和对应精度,构建几何求解表达式,利用质心法估计目标位置坐标。验证结果表明,该方法定位结果优于同组中任意交叉定位结果。
关键词:红外传感器;几何定位;极端梯度提升树;质心法
中图分类号:TN219 文献标识码:A 文章编号:2096-4706(2024)22-0132-05
Geometric Positioning Method of Multi-infrared Target Detection
Abstract: Aiming at the problems of real-time and accurate positioning of ground targets, the geometric positioning method of multi-infrared target detection is studied. In the offline stage, mass positioning data is generated, and the Extreme Gradient Boosting method is used to construct two-infrared cross positioning accuracy model. In the real-time positioning stage, firstly, the paper combines three infrared sensors two by two for direction-finding cross positioning, and calculates each group of cross positioning coordinates. Secondly, the accuracy model is called, and the corresponding infrared cross positioning accuracy is obtained by inputting the baseline information and azimuth angle information of each group of infrared. Finally, combined with the cross positioning coordinates and corresponding accuracy, the geometric solution expression is constructed, and the target position coordinates are estimated by the centroid method. The verification results show that the positioning result of this method is better than any cross positioning result in the same group.
Keywords: infrared sensor; geometric positioning; Extreme Gradient Boosting; centroid method
0" 引" 言
在信息化战争中,精确探测与定位敌方关键目标是决定战争胜负的核心要素[1]。红外传感器凭借其独特的优势,如低暴露风险、强抗干扰的特性[2],已经成为现代军事重要探测手段。随着军事环境日益复杂,单个红外传感器受性能和算法局限[3],不仅应用范围有限而且定位精度不高,难以提供稳定的定位性能,而多个红外需要结合多个测量信息进行处理[4],数据来源多,可信度高,能有效解决单一传感器技术局限,提高地面目标定位的精度和可靠性。
当前,目标定位技术的研究主要集中在最小二乘法和卡尔曼滤波方法。文献[5]全面综述多无人机搭载红外传感器对高速飞行器的定位跟踪方法,详细探讨了最小二乘法和卡尔曼滤波方法在国内外的研究进展和成果,并指出这两种方法在常规场景下均能有效保证定位精度。然而,文献也强调,在实际复杂多变的军事环境中,特别是当目标处于高速移动状态下,前进方向的不确定性和频繁的大机动转弯会极大地增加精确定位的难度。此外,环境干扰、传感器故障或通信中断等因素也会影响观测信息的稳定性,而卡尔曼滤波依赖连续的观测数据进行状态估计和预测,一旦观测数据出现断续和缺失的情况,其性能受到显著影响,难以持续提供可靠的定位结果。为了应对这些挑战,需要寻求新的定位方法和技术启示。在众多备选方案中,几何方法凭借计算量小,原理简单等显著优势[6]脱颖而出,相较于依赖复杂的数学模型和大量计算资源的定位方法,几何定位方法在实时性和鲁棒性方面表现出色。
基于上述分析,本文提出了一种多红外目标探测几何定位方法,该方法利用机器学习技术确定红外交叉定位精度模型,该模型能给出两个红外每次交叉定位的精度,对应几何定位中的几何求解因子。通过整合多个红外传感器测量信息,从数据末端出发,依据几何学原理,获取高精度目标位置信息。能有效应对目标快速机动、遮挡等情况,增强目标跟踪连续性和鲁棒性,适应复杂环境和对抗条件下的应用需求。
1" 几何定位原理
目标定位误差是指计算得到的目标位置与目标真实位置的偏差,而目标定位精度是用来度量测得的目标位置与目标真实位置的误差程度,一般情况下,测量给出的目标点位置与目标的准确位置间的定位误差在定位精度范围内[7]。对于雷达而言,如果以目标准确位置为圆心,以雷达定位精度为半径画圆,那么,雷达给出的目标点在这个圆内;反之,如果以雷达给出的目标点为圆心,以雷达定位精度为半径画圆,那么,目标位置真值也在这个圆内。当使用三部雷达测量同一目标,重复画圆过程,目标位置真值就在三个圆的交界处。
本文提出的几何定位是一种利用三角形的几何属性来估计目标位置的方法[8],主要从雷达目标定位精度获得启发。几何定位原理如图1所示,使用三个红外传感器对目标进行定位,由于红外传感器不具备测距功能,单个红外无法直接对目标进行定位,需要两个红外经过测向交叉[9]给出目标位置。假设三个红外传感器两两组合,给出三个目标位置P1(x1,y1)、P2(x2,y2)和P3(x3,y3),对应的红外交叉定位精度为r1、r2和r3,用这6个观测数据画圆,那么目标真值位置就在三个圆的相交区域,即BDF围成的阴影区域。
在三个圆相交区域内取一点作为待求的目标位置,相交区域越小,待求的目标位置越接近目标真实位置。在理想情况下,三个圆交于一点,该点就是目标真实位置,此时红外交叉定位精度和红外交叉定位误差达到一致。但实际应用中,由于环境和技术因素干扰,红外交叉定位精度很难完全消除误差影响,只能通过不断优化和改进算法来提高交叉定位精度。因此,要想通过几何定位方法获取高精度目标位置最直接且有效的方式就是提高红外交叉定位精度,通过减少定位误差,能够缩小三圆相交的区域,进而更精确的确定目标位置。
2" 几何定位过程
2.1" 红外交叉定位精度模型的确定
2.1.1" 方法选择
红外交叉定位的精度是几何定位的关键技术,也是难度最大的一项技术。之所以说难度最大是现阶段还没有看到这方面的研究成果,也没有红外传感器交叉定位精度数据。通过红外交叉定位原理分析,总结出影响红外交叉定位精度的主要因素有三个,分别是测量方位角、位置基线距离和目标到红外传感器的距离。而红外交叉定位精度与多种因素之间存在复杂的非线性关系,使得传统的数学方法难以准确描述这种关系,只能通过大数据、人工智能进行两个红外传感器交叉定位的精度的求解。
本文红外交叉定位精度模型构建的任务是通过前几列数据特征预测最后交叉定位的精度,需要解决的是一个回归问题,又考虑到特征数据只有三个,复杂度较低,但是训练数据的量很大,而且均是数值数据,因此在机器学习模型的筛选中,主要考虑使用复杂度较低、求解简单的回归模型。而极端梯度提升树作为一种基于梯度提升决策树的机器学习算法[10],具有强大的预测能力和灵活性,不仅在数值处理能力上表现出色,而且能够自动捕捉数据中的复杂关系和非线性特征,同时通过并行运算和内存优化技术,能轻松处理大规模数据集。因此,考虑选择极端梯度提升树作为红外交叉定位精度模型构建的核心算法。
2.1.2" 数据集生成
在实际应用中,红外精度数据集的构建是一项重要任务,数据集构建通常依赖现场采集与测量相结合的方法,这种方法要求使用无人机携带红外装备对目标进行探测,并通过复杂的计算过程获取大量数据,每组数据都包含方位角、基线信息等测量元素及其经过数据处理后得到的测量误差信息。但本文受限于现场采集的可行性和效率,选择通过仿真技术生成足够的数据用于机器学习。
为了训练出性能优良且可靠的精度模型,充足且多样化的训练数据集至关重要,这些数据需要尽可能完整的覆盖到不同距离,不同角度的测量场景。首先需要确定红外传感器到目标的距离、方位角和测角精度的合理范围,其次在规定区域内随机生成目标真实位置,对于每个目标真实位置确定传感器的位置,根据目标位置和传感器位置,计算两个红外的方位角以及两红外的基线距离,根据设定的测角精度,向方位角中添加随机误差,误差的大小遵循正态分布,在此基础上进行多次测量,尽可能多的覆盖各个误差情况。将计算得到的基线距离,带有误差的方位角作为特征数据,将交叉定位的误差(通过实际计算位置和真实位置之间的距离来得到)作为标签数据,将这些数据以数据集形式保存,供后续训练使用。
2.1.3" 模型构建
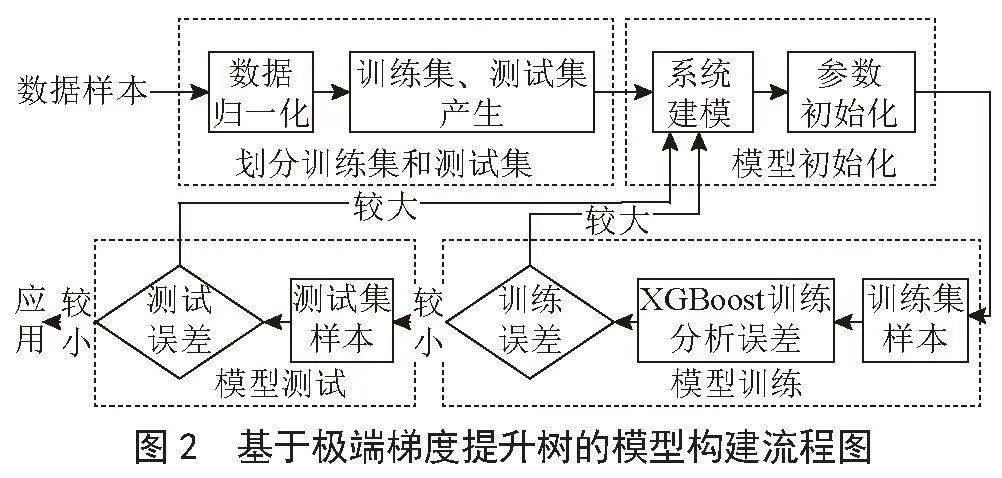
极端梯度提升树通过迭代的训练多个决策树来改进预测性能。在每一次的迭代过程中,都会试图拟合前一次迭代的残差,从而不断地优化模型的预测结果。其中心思想是通过引入正则化来约束模型的权重,避免模型过于复杂并减少过拟合风险,从而获得优良的预测性能。模型构建流程如图2所示,首先输入样本数据,将样本数据进行归一化处理并按照70%比例划分训练集和测试集。紧接着利用极端梯度提升树进行系统建模,并初始化模型参数,然后使用训练集样本进行模型训练,并分析误差大小,若误差较高则重新调整模型参数,包括学习率、树深度等,可以使用贝叶斯优化方法找到最优参数组合,若误差较低则将训练好的模型用于测试,若测试误差大则重新调整模型参数,反之则部署到平台进行应用。
2.1.4" 模型评估
在对极端梯度提升树进行训练,并通过一系列调优方法对模型进行优化后,需要选择一组评估指标量化模型性能,其中绝对平均误差(Mean Absolute Error, MAE)和均方根误差(Root Mean Squared Error, RMSE)是衡量模型好坏的两种常用的评估标准,都能反映预测值和真实值之间的差异程度。MAE能直接反映真实误差,通常希望MAE值越小越好,这意味着模型预测结果更加接近真实值,为了不使误差之间的正负值相互抵消,可以采用绝对误差的平均值来表示误差,绝对平均误差计算公式如式(1)所示:
均方根误差是预测值和真实值平方差平均值的平方根,RMSE是先对误差进行平方的累加后再开方,平方操作会使大的误差在总误差中占据更大的权重,均方根误差计算公式如式(2)所示:
利用评价指标对模型进行分析,整体考虑时间、拟合效果以及预测准确度,评估情况如表1所示。结果表示,该模型无论是在定位精度还是实时性上均满足要求。
2.2" 实时定位
2.2.1" 分组处理
使用三个红外传感器A、B和C对目标进行定位,每个红外传感器能够测到目标的方位角信息αi,i=A,B,C以及自身的位置信息pi,i=A,B,C,将三个红外传感器两两分组(A和B一组、A和C一组,B和C一组),共形成三组传感器组合{Sk},k=1,2,3。
2.2.2" 求解交叉定位坐标
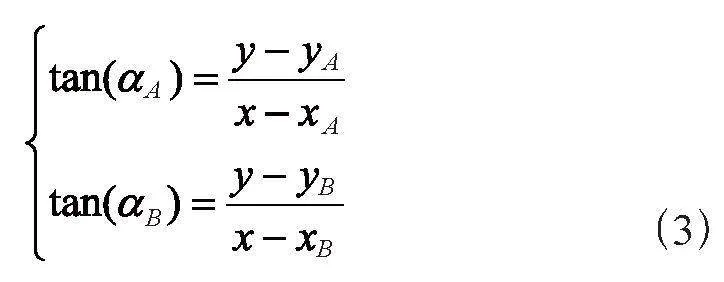
在对红外传感器进行分组处理后,需要求解每一组红外交叉定位坐标。对于第一组红外传感器组合,假设两个红外的平面直角坐标分别为(xA,yA)和(xB,yB),测量目标的方位角为αA和αB,目标的真实位置为(xT,yT),待求目标坐标为(x1,y1)。结合两个红外目标方位角和自身位置信息,利用方位线的交汇原理可以求出待求目标位置。联立方程如式(3)所示:
其中,限定目标观测方位角αi是水平投影平面中从正北方向偏移至观测方向的角度,取值范围为[-π,π],顺时针方向偏移为正,逆时针方向偏移为负。
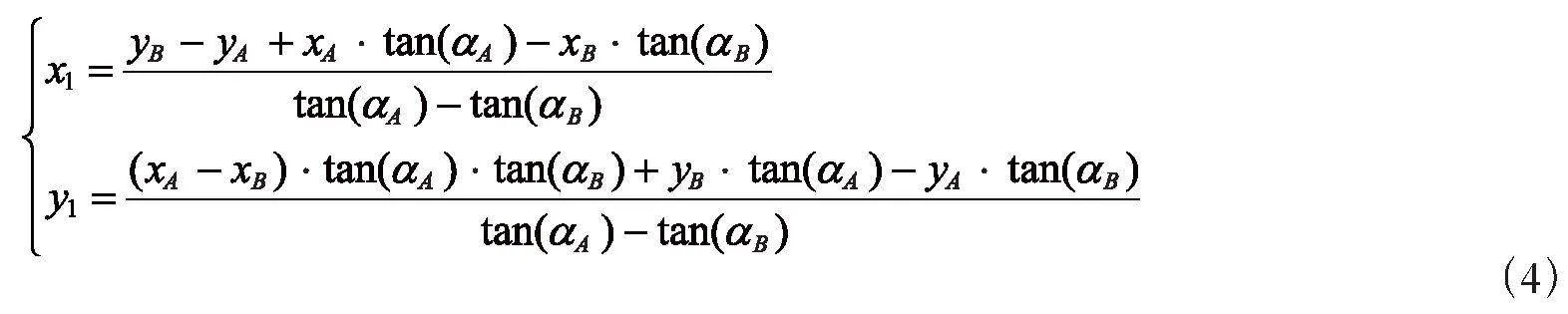
求解待测目标的交叉定位坐标,计算公式如式(4)所示:
依次对每组红外传感器进行交叉定位,得出交叉定位坐标Pi(xi,yi),i=1,2,3。
2.2.3" 获取几何求解因子
获取几何求解因子实际上就是获取几何定位的半径。通过调用离线阶段创建的红外交叉定位精度模型,将每组传感器的测量信息,主要是两个红外之间基线距离信息、两个红外的测量方位角信息,分别输入精度模型,模型给出的结果就是几何求解因子,每组红外传感器都有对应的几何求解因子ri,i=1,2,3。
2.2.4" 估计目标位置
将上述计算得出的红外传感器交叉定位坐标(xi,yi),i=1,2,3和几何求解因子ri,i=1,2,3相结合,依据已知条件列出几何求解方程组如式(5)所示:
通过求解上面的几何求解方程组,能得到几何图形全部交点坐标。由于目标真值在三个圆相交的公共区域,而公共区域内任意一点都应满足到圆心的距离均小于等于圆的半径这一条件,基于这个原则,通过检查两个圆的交点是否位于第三个圆的内部来确定公共交点。这个过程需要对每个交点进行判断,最后统计公共交点个数。具体判别方法为:计算两圆的交点与第三圆圆心的距离,并与该圆的半径进行比较,若交点距圆心的距离小于半径,那么该交点就认为是公共交点。
在确定公共交点个数之后,可以根据结果推断目标所在位置区域,目标就在几个公共交点为顶点围成的区域内。为了更精确的确定目标位置,采用质心算法来求解目标位置(XM,YM)。质心计算方法如式(6)所示。
3" 仿真验证结果及分析
3.1" 仿真环境
为了便于验证多红外目标探测几何定位方法的有效性和稳定性,需要依据该方法开发相应的仿真验证软件。软件开发环境要求基于微服务的PyCharm环境,需支持chrome浏览器,将定位过程中的关键算法嵌入该平台中。在技术选型上,前端采用了Vue框架来构建用户界面,后端则运用了Flask框架来处理业务逻辑。同时,还充分运用了TensorFlow等开发工具进行数据处理和机器学习模型的训练,以提升软件的智能化水平。
3.2" 仿真结果分析
对本文提出的几何定位方法进行仿真验证,设计验证过程如下:每次仿真时生成一个目标点,并在目标附近15 km处生成三个红外位置点,三个红外位置点被标记为红外A、红外B和红外C,其中红外B位于红外A和红外C之间,目标和传感器的布置如图3所示。为了模拟实际方位角测量,在红外测角信息中添加随机角度误差,在获得带有误差的测角信息后,结合红外自身位置,利用测向交叉定位方法解算出两个红外的交叉位置坐标,三个红外两两组合定位可得到三个交叉位置坐标,然后将两红外间的基线和两个测量方位角作为输入,代入精度模型中,以获取对应的几何求解因子(目标位置与交叉位置的距离差),并利用几何方法估计出目标的位置坐标,记录定位结果,采用均方根误差对定位性能进行评价。
为了验证几何方法的有效性,对同一目标进行多次仿真。在实验中,将(15,15)km设定为目标位置点,规定红外的测角精度为0.1度,每次仿真过程中,保持目标位置不变,调整三个红外A、B、C的位置,进行100次仿真测试,计算出几何定位误差与交叉定位误差并进行比较。为了更直观地展示这一结果,选取其中10个测试点,并将其定位效果绘制成图4。
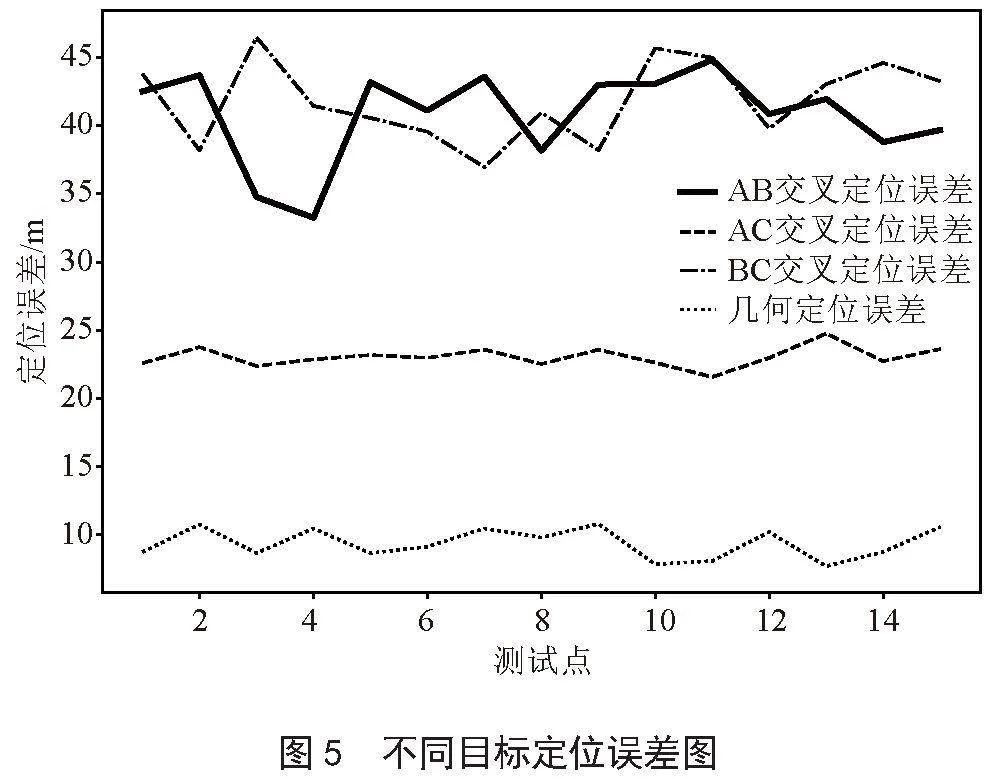
从图4中可以明显看出,相较于交叉定位,几何定位方法在各个测试点展现出更低的定位误差,具有较好的定位效果。为了进一步验证几何方法的稳定性,比较几何定位在不同目标场景中的定位性能,在系统里随机生成15个目标位置,对每个目标位置点进行100次验证,并记录定位误差,依次对每个目标进行验证,经过多次实验取平均值,结果如图5所示。
从图中可以看出,在不同的目标场景中,几何定位方法表现出了较为稳定的定位效果,定位误差的平均值在较小的范围内波动,并且相较于其他交叉定位结果,定位精度有明显提升。
4" 结" 论
提出了一种多红外目标探测几何定位方法。首先通过引入机器学习方法构建两红外交叉定位精度模型,解决几何定位半径问题;其次借助AOA测量值和测向交叉定位方法,解决几何定位坐标问题;最后采用质心算法估计出最优的目标位置。实验结果表明,该方法定位误差优于同组中任意交叉定位误差,定位精度提升明显,同时该算法计算量小,具有较强的实时性,而且通过增加传感器数量也能有效提升定位精度。
参考文献:
[1] 耿傲婷.基于AOA的多站无源定位关键技术研究 [D].南昌:南昌大学,2024.
[2] 王俊迪,许蕴山,彭芳,等.基于岭回归的红外协同定位优化算法 [J].北京航空航天大学学报,2020,46(3):563-570.
[3] 骆明伟,檀立刚.机载红外设备多平台协同探测无源定位方法 [J].应用光学,2021,42(3):392-397.
[4] 郝振兴,罗继勋,胡朝晖,等.红外探测与追踪的双机被动定位模型 [J].探测与控制学报,2016,38(1):28-32.
[5] 王晨昕,符文星,张通,等.基于红外传感器的多无人机对高速飞行器协同定位跟踪方法综述 [J].无人系统技术,2024,7(1):20-35.
[6] 刘文,赵旭,李连鹏,等.基于TL-LFL的UWB室内定位算法 [J].仪表技术与传感器,2022(11):82-87.
[7] 杨华波,张士峰.导弹命中精度的序贯截尾概率圆检验方法 [J].国防科技大学学报,2024,46(2):62-69.
[8] 周杰,杨帆,李均涛.一种改进的Eddystone-TLM质心室内三边定位算法 [J].现代电子技术,2020,43(2):179-181.
[9] 岳娟,高思莉,李范鸣,等.基于GPS的红外成像测向交叉定位方法 [J].激光与红外,2019,49(12):1447-1454.
[10] 缪颖.基于改进XGBoost的室内高精度定位算法研究 [D].常州:常州大学,2022.