
摘" 要:随着物流自动化领域的快速发展,码垛机器人在实际应用中发挥着越来越重要的作用。采用码垛机器人进行码垛工作,能有效减轻工人的劳动量,显著提高工作效率,降低企业生产成本。文章以ABB机器人为基础,采用SolidWorks软件对其工作过程进行三维建模,运用RobotStudio仿真软件完成工作站的布局,采用Smart组件设置动态参数,为解决机器人在设计、制造和运行过程中的问题提供了一种实用高效的方法,也为码垛机器人产品的开发提供了重要的参考。
关键词:工业机器人;码垛;仿真
中图分类号:TP242.2;TP391.9" 文献标识码:A" 文章编号:2096-4706(2024)22-0194-05
Simulation Design of Industrial Robot Palletizing Based on SolidWorks
Abstract: With the rapid development of logistics automation field, palletizing robots are playing an increasingly important role in practical application. The use of palletizing robots for palletizing work can effectively reduce the workload of workers, significantly improve work efficiency, and reduce production costs for enterprises. This paper is based on ABB robots and uses SolidWorks software to model their working process in 3D. RobotStudio simulation software is used to complete the layout of the workstation, and Smart components are used to set dynamic parameters. It provides a practical and efficient method for solving problems in the design, manufacturing, and operation of robots, and also provides important reference for the development of palletizing robot products.
Keywords: industrial robot; palletizing; simulation
0" 引" 言
随着工业4.0时代的到来,智能机器人技术和自动化生产在生产制造业中的应用越来越广泛。其中,采用工业机器人进行搬运、码垛工作已经成为码垛领域的重要组成部分,码垛作为物流和生产过程中不可或缺的重要环节,其效率和准确性直接影响到企业的生产效率和成本控制。与传统的码垛方式相比,机器人码垛仅仅需要少量的人力物力投入,且码垛、搬运效率较高、误差低等优势[1]。因此,研究和开发基于SolidWorks的工业机器人码垛工作站系统,对于提高码垛、搬运作业的自动化水平和生产效率,降低企业成本,具有重要的现实意义和研究价值。
通过Robotstudio仿真软件完成码垛机器人工作站的生产布局,采用SolidWorks 软件对工业机器人码垛米袋工作站的生产布局进行建模,通过分析确定码垛机器人的结构、驱动方式以及控制系统方案,针对码垛过程进行Smart组件的分析,能有效提高码垛工作站的搬运和码垛效率,提高整个生产线的生产效率[2]。
1" 组件三维建模
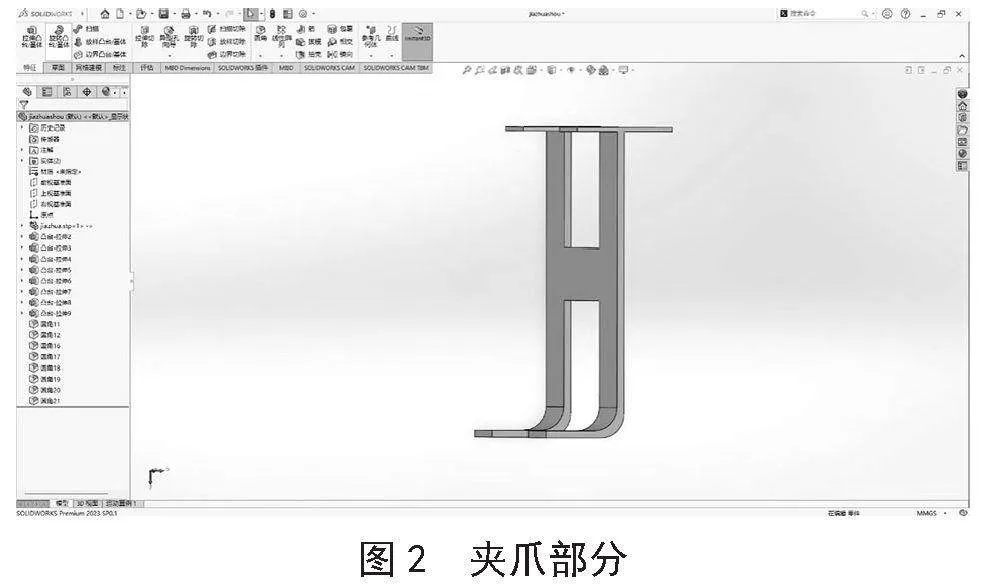
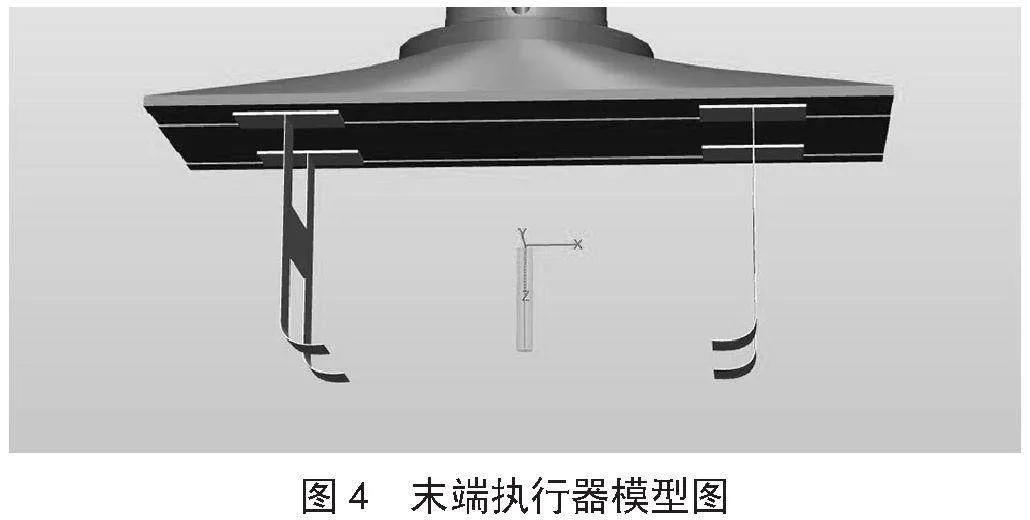
1.1" 夹爪执行器建模
夹爪安装在工业机器人手臂上,主要作用是用来抓取工件和执行码垛工作。由于米袋的尺寸为60 cm×40 cm×15 cm,设计夹爪执行器长度为70 cm,为能抓取15 kg米袋,在夹爪执行器的上面设计一个20 cm的圆盘。夹爪执行器结构分为固定和夹爪两个部分。采用SolidWorks软件设计,选择新建“零件”,然后进入操作界面,选用“草图绘制”功能,根据要绘制的零件尺寸进行草图绘制,草图建立完成后,对建立的草图进行“拉伸凸体/基体”操作,使建立的二维草图转变为三维长方体,并在“拉伸凸体/基体”对话框中设置相应的拉伸凸体尺寸,给定相应的厚度,最终通过预先设定的尺寸长度70 cm宽度25 cm、顶部圆盘20 cm直径的尺寸进行三维拉伸和切除、倒角等操作完成末端执行器固定部分创建[3]。完成固定部分和夹爪部分的零件模型建模,在通过新建“装配体”把设计好的零件图导入“装配体”里,然后点击“装配体”选项卡中的配合选项,在弹出“配合”选项框后选择两个零件要配合的面,进行配合,设置完成后确定即可,如图1至图4所示。夹爪执行器的建模是关键的一步。通过合理的建模过程和精确的参数设置,我们可以设计出满足实际需求的夹爪执行器,为工业机器人码垛系统的稳定运行和高效生产提供保障[4]。
1.2" 米袋、传送带、托盘建模设计
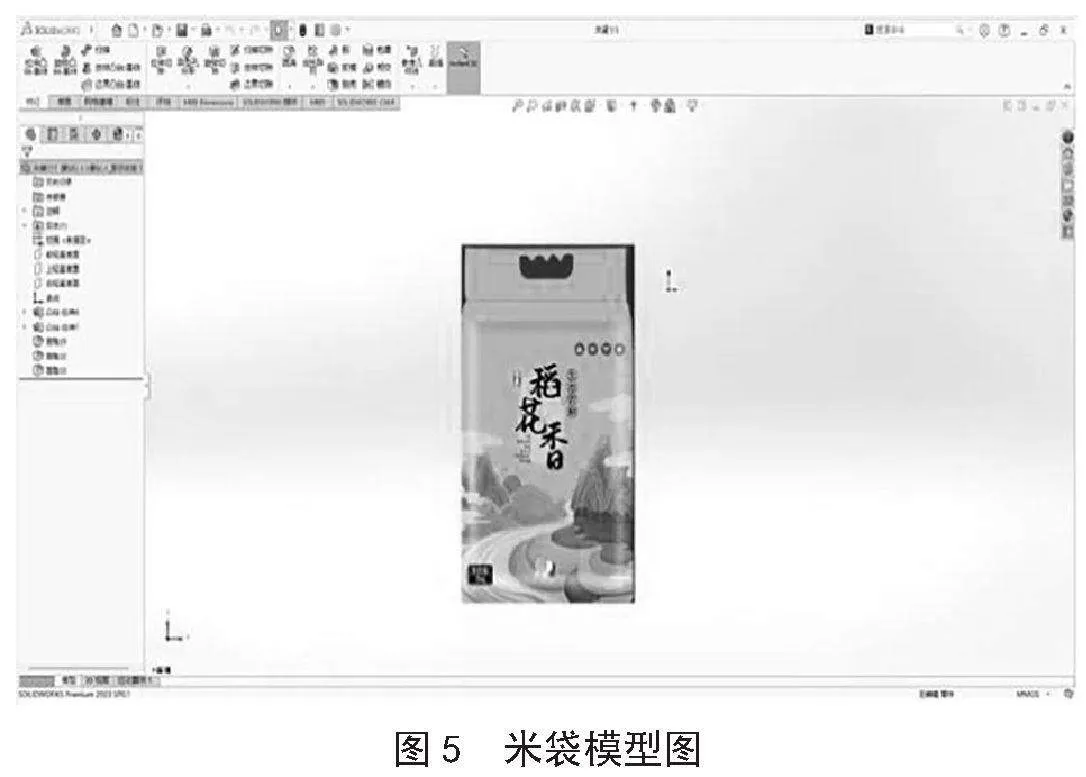
米袋是在SolidWorks建模保存后导入RobotStudio中。工作站中用到的米袋是根据大米生产企业规格及数量要求进行选取,主要选取重量为10 kg重的米袋,通过观察,发现米袋尺寸大部分都是长宽为35 cm×55 cm,采用该尺寸在SolidWorks中对米袋进行建模设计,如图5所示。
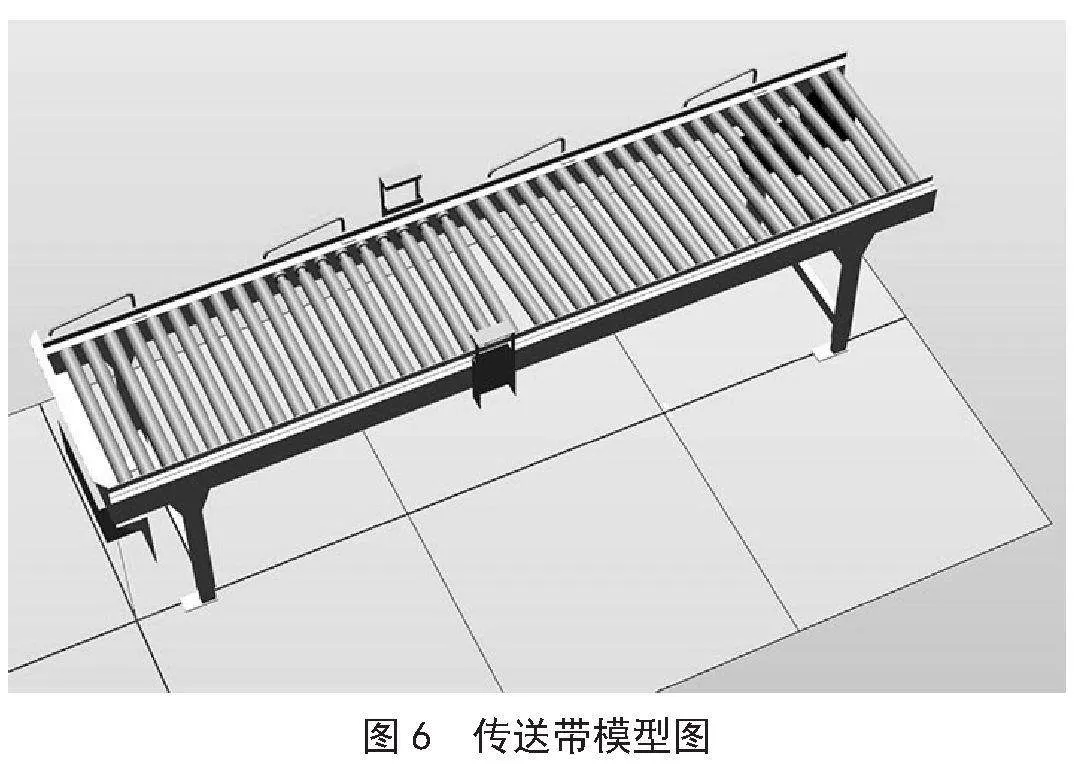
传送带模型直接选用RobotStudio自带的模型库中的输送链Guide,如图6所示,尺寸宽度选用60 cm动态传送链,传送带在工作过程中,米袋被不断搬运到传送带中,然后沿着传送链移动[5]。当米袋抵达输送带的尽头时,机器人接收到产品到达的信号,机器人的夹爪抓取米袋放到旁边的托盘中。
通过Robot Studio软件,建立一个码垛工作站模型,对工作站的工作情况进行模拟,在整个码垛米袋流水线中,传送带的前端会自动生成米袋、米袋随着传送带向前运动、米袋到达传送带末端后停止运动、工业机器人抓取米袋进行码垛,传送带前端再次生成米袋,如此反复,循环工作。通过这一工作流程可以充分分析码垛机器人在整个工作站的工作情况,对工作站的平稳运行将起到至关重要的作用[6]。
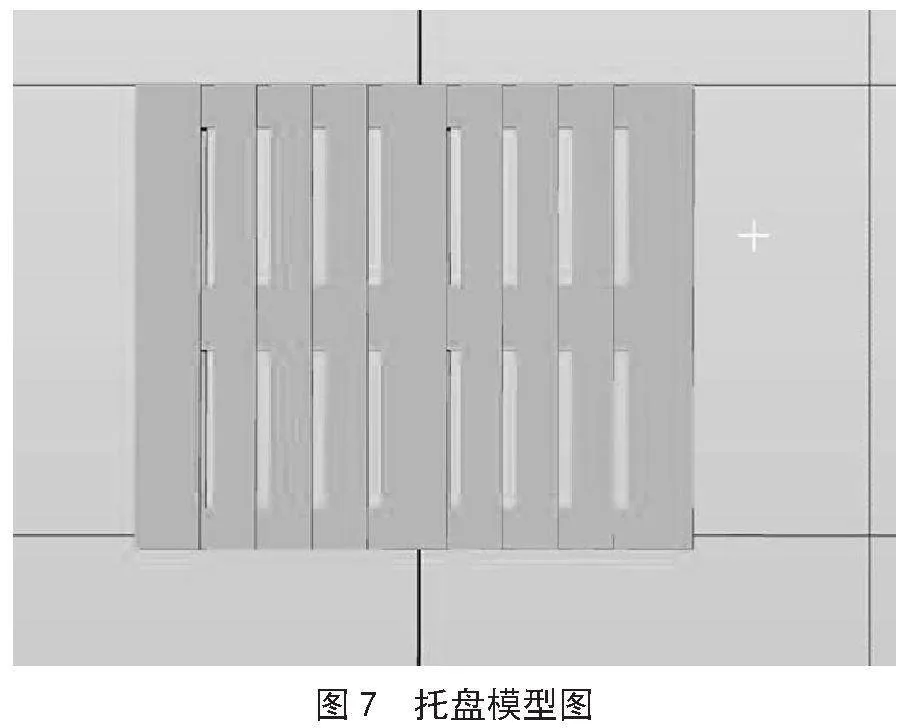
根据米袋尺寸和码垛放置方式确定托盘尺寸为70 cm×90 cm,在库里找到合适的托盘模型导入RobotStudio中,如图7所示。
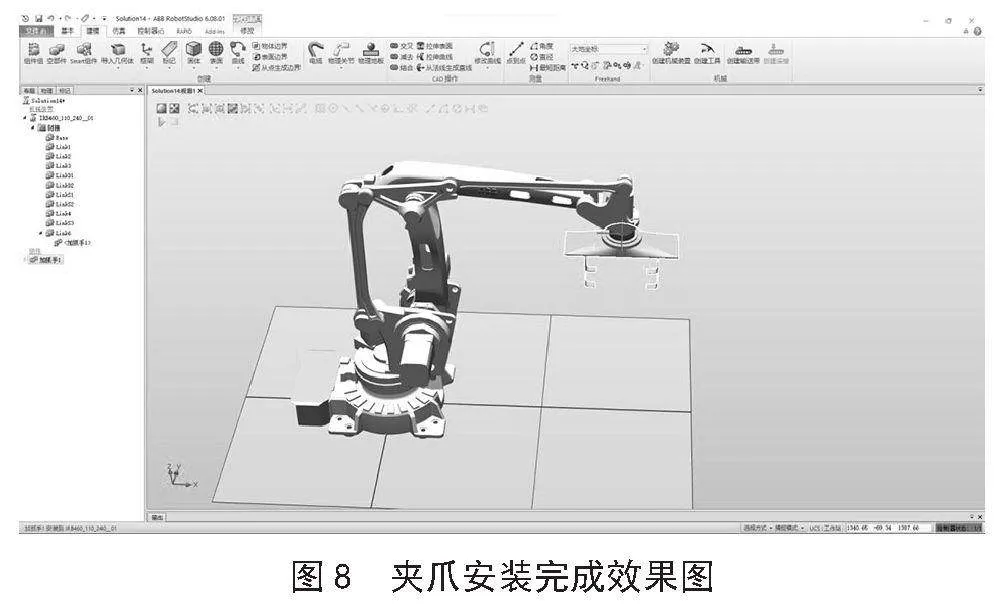
把SolidWorks软件中建立的夹具模型导入RobotStudio中,从RobotStudio中通过“基本”菜单单击进入“导入几何体”确定夹具装配体的位置,导入RobotStudio中,末端执行器夹爪已经导入工作站中,但是需要调试位置,通过右边“布局”选项卡右击我们导入的末端执行器文件,完成以上装配工作后,右击菜单中的“安装到”选项,找到前面导入的机器人型号,点击确认,此时会提示是否更新“夹爪”的位置,点击选择项里面的“是”即可,安装完成后效果图如图8所示[7]。
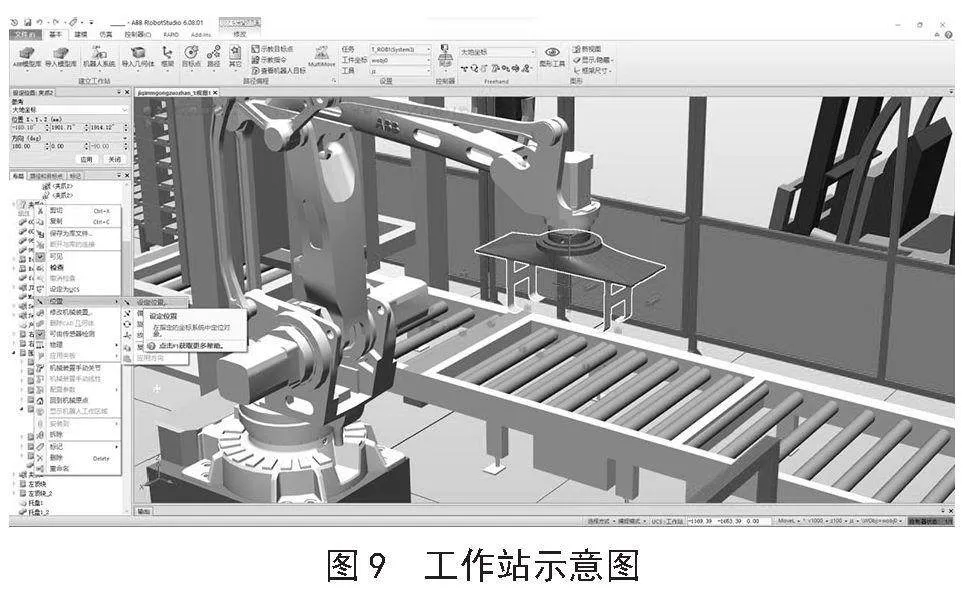
当机器人夹爪执行器安装完毕后,鼠标右击末端执行器,在弹出的菜单中选择“位置”选项进行位置设置,机器人位置定义通过世界坐标系来定义,世界坐标系是以大地作为参考的直角坐标系,系统中的其他坐标系都是和世界坐标系直接或者间接地与之相联系的。在弹出的对话框中选择标准坐标系作为参考坐标,随后单击进行参数和方向设置[8]。
一个完整的米袋码垛机器人工作站是一个高度集成化的系统,包含了多个关键部分,如传送带、托盘、夹爪等。每个部分都扮演着不可或缺的角色,共同协作以完成高效、准确的码垛任务,如图9所示。
2" 仿真及程序调试
在完成各组件建模后,需要对机器人的运动轨迹进行模拟。通过设定机器人的起始位置、目标位置和运动路径,可以观察机器人在实际工作环境中的运动情况。在运动轨迹模拟过程中,需要进行碰撞检测,以确保机器人在运动过程中不会与工作台、设备或其他组件发生碰撞。若存在碰撞问题,需要对机器人模型或工作站布局进行优化,以消除潜在的安全隐患。
2.1" 调试与仿真运行
在系统功能调试中,我们将对米袋码垛工作站的各个功能模块进行全面检测。这包括机器人的抓取、搬运和码垛功能,托盘输送系统的正常运行,以及物料输送系统的稳定性和效率。调试过程中,我们将记录各项功能的运行数据,并分析是否存在异常或不符合预期的情况。
为了确保机器人在实际生产工作中的稳定性和效率,使用仿真软件RobotStudio进行编程和仿真测试是必不可少的。将米袋码垛机器人的3D模型导入RobotStudio中,对机器人进行程序编制,首先要对机器人的工作轨迹进行规划,根据米袋的位置和码垛要求,规划机器人的抓取路径和码垛路径。其次进行动作定义:定义机器人的抓取、搬运和码垛动作,确保动作的流畅性和准确性。最后进行参数设置:设置机器人的运动参数,如速度、加速度等[9]。
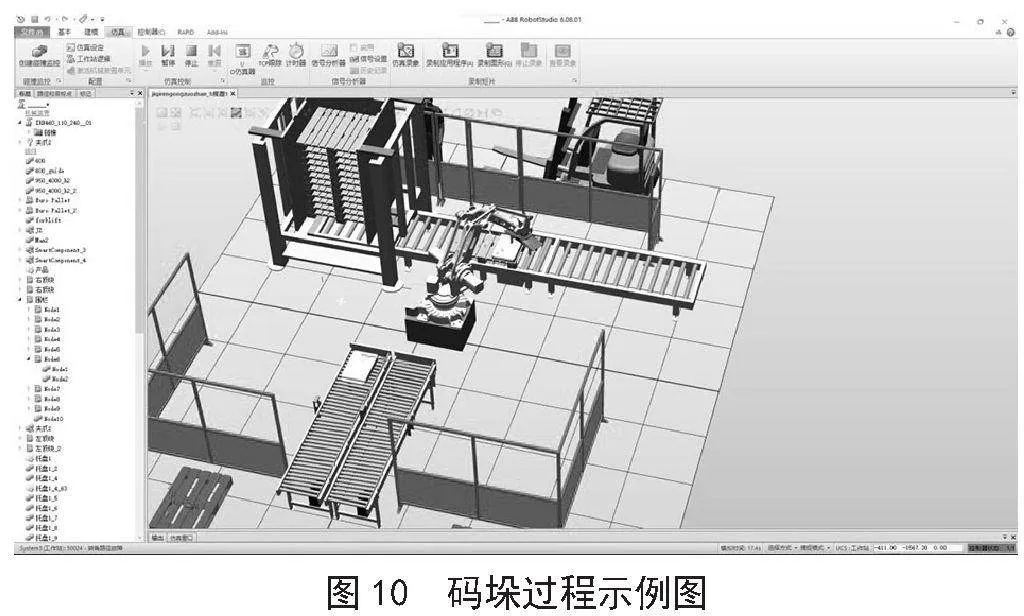
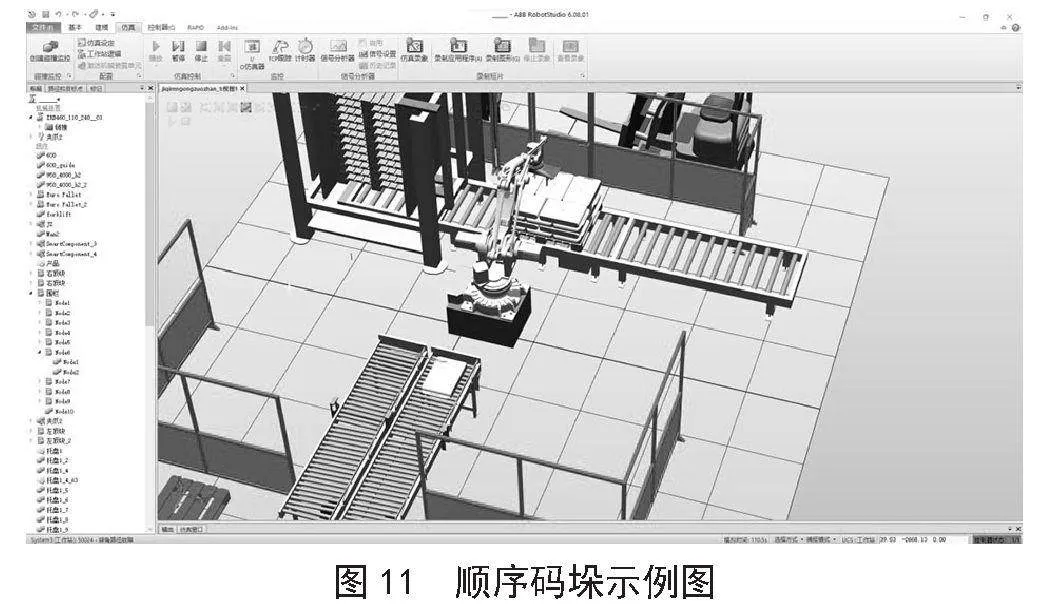
参数设置完成后,在RobotStudio 软件中点击“仿真”功能菜单,在选项菜单中点击“播放”,以执行虚拟仿真过程,在动态传送带上,开始端不断的有新米袋出现,当被传送的米袋到达传送带的末端时,机器人会接收到一个米袋到达的信号,然后机械臂的夹爪执行器将其夹取并放到对应的托盘上面,如图10所示。以此循环,对传送带米袋顺序抓取然后在到托盘上进行顺序码垛,如图11所示。
2.2" 仿真结果
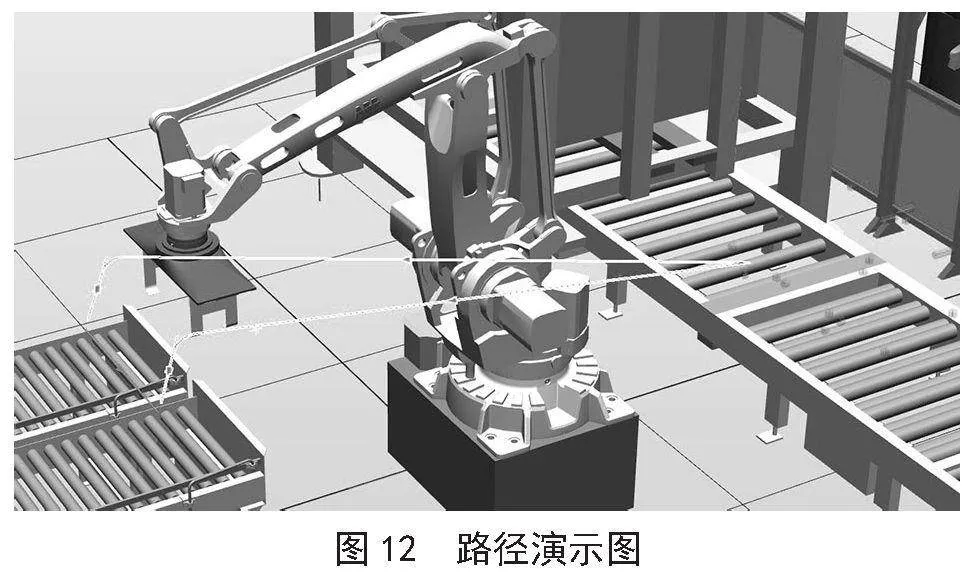
从工作站的建模、运动轨迹的设置,米袋工件放置形式的设置,到I/O信号的设置以及信息流Smart组件的设计。在此基础上,根据米袋码垛堆放过程的要求,编制相应的程序,并将其应用于仿真系统中,通过对I/O信号的检测是否准确、信息流的交换是否畅通,同时,还要对码垛工艺的正确性进行检验。码垛路径的设置主要是按照顺序原则,机器人放置在传送带右侧,当米袋到达传送带末端时,机器人进行抓取,然后根据码垛路径从左边将米袋夹持到托盘上方,避开右边托盘库,防止码垛运动过程发生碰撞,如图12所示。
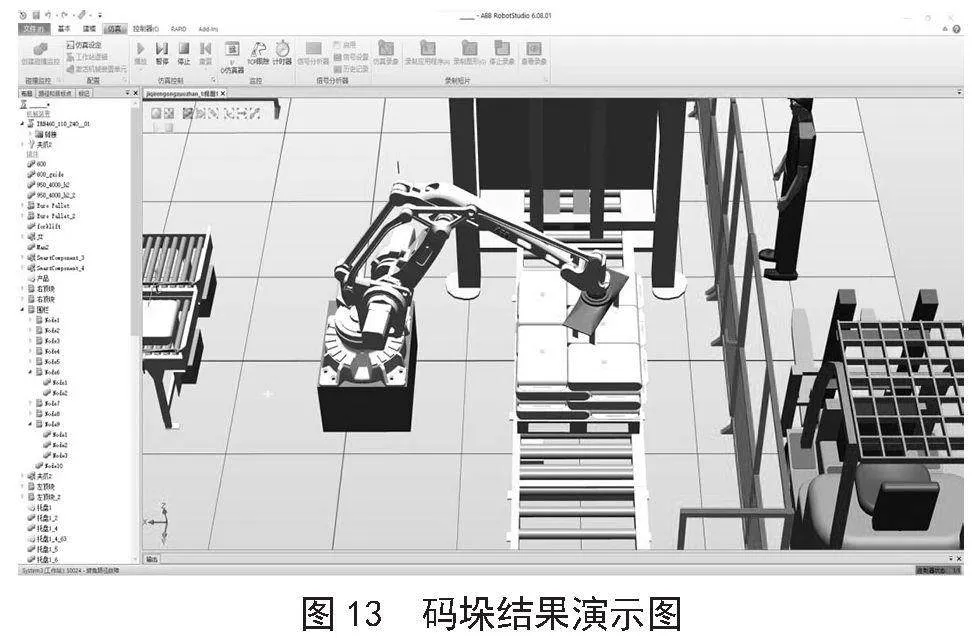
最终的仿真结果验证了自动化米袋码垛工作站系统的设计、参数配置和工艺系统的正确性,通过以上的调试,机器人能够实现米袋的抓取与卸载,整个仿真工作站的成功大幅度地提高了搬运、码垛的生产效率,动作过程连贯无碰撞,动态仿真效果演示也没有问题,如图13所示。
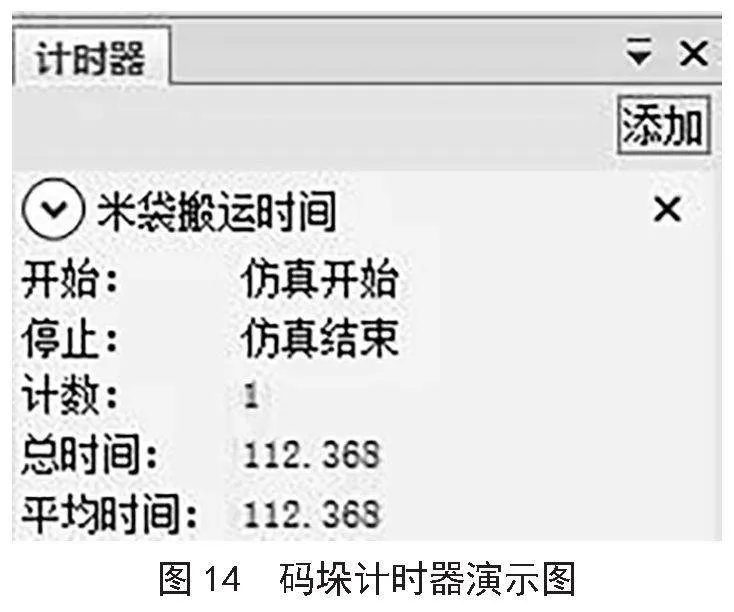
对米袋码垛工作站系统进行三维建模设计的研究,并通过仿真对搬运码垛系统路径进行了验证。通过仿真软件中的计时器得到一个完整的码垛完成时间是在112秒,如图14所示,总共码垛二十袋平均一袋5.5秒,经过计算,一天工作八小时可以完成米袋码垛5 236袋[10]。整个仿真实现了自动化效果,码垛机器人能够稳定的对米袋工件进行抓取、卸载,整个工作流程实现了工人精简,提高了码垛工作效率。
3" 结" 论
本文通过选取ABB工业码垛机器人为研究对象,采用SolidWorks软件对米袋码垛机器人工作过程进行三维建模,主要内容有:对工作站布局进行了设计建模,对物料传送带、夹具、托盘的Smart动态组件进行了设计,对机器人码垛米袋生产过程编程和运行进行模拟仿真。通过模拟、仿真、调试,发现码垛工作站的设计符合以下设计要求。
1)根据实际生产情况,选择了ABB码垛机器人进行仿真,该机械臂具有4个自由度,主要为堆放和码垛工作设计。
2)基于SoildWork软件,构造出整个码垛机器人所需要的工具,尤其是末端执行器夹爪的设计。
3)在RobotStudio软件的基础上,建立对应的三维模型,对码垛机器人的运动轨迹进行规划,再按照规划搭建码垛机器人的仿真模拟系统,生成传送带和抓取工件的动态动作,并生成对应的Smart组件等。
4)使用RobotStudio软件,对码垛机器人工作站上进行模拟、仿真操作,并通过参数的设置对工作站的运行效果进行测试,直到生产过程安全合理。
模拟的目的在于便于进行实际生产的测试,减轻企业用人成本,减小人工工作风险,并提升程序的开发效率。该系统可以为码垛工作提供方便,广泛,安全,可靠的工作环境。
本文的研究内容对于推动工业机器人码垛技术的发展和应用具有一定的创新性和实用性。研究成果将为企业提供更加高效、智能的码垛解决方案,促进制造业的转型升级和可持续发展。但由于在实际应用过程中,由于其坐标系统的设定和堆垛位置的偏差都没有达到理论上的精确程度,所以距离实际运用还有一定的空间。因此,对程序进行优化,路径等内容也将成为后续研究的主要方向。
参考文献:
[1] 吕栋腾,仝敏.ABB工业机器人码垛工作站的仿真设计 [J].机械工程与自动化,2023(3):53-54+58.
[2] 韩华.基于RobotStudio的动态传输链及工业机器人码垛工作站的仿真设计 [J].开封大学学报,2021,35(3):81-89.
[3] 史秋雨.工业机器人应用系统虚拟仿真技术的研究 [D].上海:上海第二工业大学,2020.
[4] 王沛文.码垛机器人造型设计及仿真分析 [D].南京:南京航空航天大学,2018.
[5] 李福武,黎昌南.工业机器人码垛工作站的设计与仿真 [J].工业技术创新,2021,8(6):19-24+40.
[6] 邹亮. 双抓手码垛机器人结构优化设计及控制系统研究 [D].安徽:合肥学院2023:50-52.
[7] 梁彦荣.袋装物料码垛机器人装置的虚拟设计[D].兰州:兰州理工大学,2020.
[8] 李慧.工业机器人码垛工作站仿真设计[J].自动化应用,2021(5):54-59.
[9] 王建菊.ABB机器人码垛编程优化仿真设计[J].南方农机,2021,52(19):137-139.
[10] 陈爽,尚和平.一种码垛工艺方法及仿真实验平台设计[J].现代制造工程,2019(9):54-61.