摘" 要:为康复训练和体育训练提供支持,研究设计了一种基于传感器技术的智能康复看护机器人系统。通过对系统功能和性能进行多次实验验证和定量分析,全面评估了系统在不同条件下的表现。结果显示,该系统具有良好的稳定性和可靠性,在不同条件下能够满足实际应用需求。动作识别准确率保持在较高水平,姿态识别误差范围稳定在可接受范围内,表明系统具有良好的动作识别能力和姿态识别准确性。未来研究将进一步优化系统算法和性能,探索更多的应用场景,并将系统扩展到更多的设备和平台上,使该系统在人机交互、健康管理等领域发挥作用,为人们的生活和健康带来更多的便利和福祉。
关键词:传感器技术;动作识别;姿态识别;康复训练
中图分类号:TP311 文献标识码:A 文章编号:2096-4706(2024)22-0189-06
Design and Implementation of Intelligent Rehabilitation Care Robot System Based on C++
Abstract: In order to provide support for rehabilitation training and sports training, an intelligent rehabilitation care robot system based on sensor technology is studied and designed. Through multiple experimental verification and quantitative analysis of the system function and performance, the performance of the system under different conditions is comprehensively evaluated. The results show that this system has good stability and reliability, and can meet the practical application requirements under different conditions. The accuracy of action recognition is maintained at a high level, and the error range of posture recognition is stable within the acceptable range, indicating that the system has good action recognition ability and posture recognition accuracy. Future research will further optimize the system algorithm and performance, explore more application scenarios, and expand the system to more devices and platforms. This will enable the system to play a role in man-machine interaction, health management and other fields, and bring more convenience and well-being to peoples lives and health.
Keywords: sensor technology; action recognition; posture recognition; rehabilitation training
0" 引" 言
康复医学作为医学领域中的重要分支,旨在帮助患者恢复健康、提高生活质量。随着人口老龄化和慢性病患者数量的增加,对康复医疗服务的需求不断增加,这也促使康复技术和服务不断创新和改进。同时,智能技术的快速发展为康复医学领域带来了新的机遇和挑战。智能康复系统作为康复医学与人工智能技术相结合的产物,能够提供个性化、高效率的康复服务,对促进患者康复具有重要意义。
1" 研究目的和意义
本研究旨在设计和实现一款基于C++的智能康复看护机器人系统,以应对日益增长的康复护理需求。通过结合人工智能、机器学习和康复医学知识,目标是打造一种能够个性化、全面支持康复过程的智能系统。具体来说,研究目的包括:
设计一个功能完善的康复看护机器人系统,能够根据患者的个体特点和康复需求提供个性化的康复方案和护理服务。利用先进的机器学习算法和人机交互技术,使机器人系统能够实时监测患者的康复进展,并及时调整康复计划,以最大限度地促进康复效果。提高康复护理的效率和可及性,降低人力成本,使更多有康复需求的患者能够享受到高质量的康复护理服务。探索人工智能在康复医学领域的应用潜力,为未来智能医疗系统的发展提供有益经验和参考。通过实现上述目标,期望为康复医学领域的发展贡献一份力量,为患者提供更加全面、智能化的康复护理方案,提高他们的生活质量和康复效果。
2" 问题分析
2.1" 潜在问题
在实现以上研究目的的过程中,可能会面临以下问题:
1)个性化康复方案设计的复杂性。定制康复方案可能导致设计复杂度的增加,难以开发出通用的方案[1]。
2)数据采集和处理的准确性。实时监测患者数据可能受到设备精度和环境干扰的影响,导致数据不准确。
3)系统可靠性和安全性。系统直接关联患者健康,故障或误操作可能导致患者受伤或康复受阻。
2.2" 问题分析
2.2.1" 个性化康复方案设计的复杂性
根据美国康复医学会的数据,个体差异导致的康复方案复杂性是康复专业面临的主要挑战之一。根据他们的研究,超过80%的康复专业人员表示他们需要更好的工具和技术来个性化康复方案设计。个性化康复方案设计复杂性的主要原因包括:
1)患者多样性。患者的康复需求、健康状况、年龄、病史等存在差异,需要针对个体特征进行定制化设计。
2)康复方案多变性。康复方案需要根据患者的变化动态调整,增加了设计和实施的难度。
3)数据需求。定制化方案依赖于大量的个体数据,包括生理指标、运动能力、病史等,数据的获取和分析成本较高。
2.2.2" 数据采集和处理的准确性
根据医疗设备行业的数据,低精度传感器和数据采集设备是导致数据不准确的主要原因之一。他们的研究发现,大约有60%的数据不准确是由于传感器精度不足造成的[2]。数据采集和处理准确性受多方面因素影响:
1)传感器精度。康复设备和传感器的准确性和稳定性直接影响数据质量。
2)环境因素。医疗环境复杂,可能存在干扰和噪音,影响数据采集和传输的可靠性。
2.2.3" 系统可靠性和安全性
根据医疗保健信息技术行业的数据,系统故障和操作失误是导致医疗设备意外发生的两大主要原因。他们的研究指出,超过70%的医疗设备意外是由于系统故障或操作失误引起的[3]。康复机器人系统的可靠性和安全性关乎患者的健康和康复进程:
1)技术风险。康复机器人系统涉及复杂的技术和软硬件集成,存在系统崩溃、漏洞等风险。
2)操作失误。操作人员的失误或不当操作可能导致意外发生,影响患者的康复效果。
2.3" 解决方法
针对个性化康复方案设计复杂性,可采用以下方法:
1)机器学习模型。基于大数据分析和机器学习算法,利用患者的生理、运动和临床数据,构建个性化康复模型,从而实现精准的康复方案设计。
2)数据驱动设计。建立数据库和数据仓库,收集和整合康复相关数据,通过分析和挖掘数据,制定个性化康复策略。
3)专家系统辅助。结合专家经验和人工智能技术,构建智能化的康复设计系统,辅助医护人员进行个性化方案设计。
提高数据采集和处理的准确性,可以采取以下措施:
1)高精度传感器。选择精准度高、稳定性好的传感器设备,确保数据的准确性和稳定性。
2)数据校正与过滤。利用数据校正算法和实时过滤技术,排除环境干扰和设备误差,提高数据质量。
3)实时监测和反馈。建立实时监测系统,对数据异常及时反馈和处理,确保康复过程数据的及时性和准确性。
确保系统的可靠性和安全性,需要采取以下策略:
1)严格测试与认证。康复机器人系统进行严格的测试和认证,确保系统稳定性和功能完整性。
2)人机交互设计。设计易用性强的人机交互界面,减少操作失误的可能性。
3" 系统设计可行性分析
3.1" 技术可行性
基于C++的智能康复看护机器人系统设计在技术上采用C++编程语言。C++作为一种高效、灵活的编程语言,具备处理实时数据、执行复杂算法和控制硬件的能力。团队成员可以利用C++的强大功能,实现系统所需的各种模块和功能。同时,现代C++编程框架和库可以加速开发过程,提高代码的可维护性和性能[4]。
3.2" 经济可行性
从经济角度看,尽管系统开发可能需要一定的投资,包括硬件设备、软件开发和人力成本,但与其带来的潜在益处相比,这些投资是合理的。通过提高康复治疗的效率和个性化水平,系统可以降低医疗机构的运营成本,减少患者的住院时间和康复周期,从而为医疗行业节省大量成本。
3.3" 操作可行性
在操作层面,C++语言的普及度和开发环境的成熟度使得团队成员能够快速上手,并且具备灵活地进行系统开发和维护的能力。同时,设计直观的用户界面和提供系统操作培训可以降低用户学习成本,提高系统的可用性和用户满意度。
4" 系统相关技术
4.1" 平台开发工具
在系统的开发过程中,选用了Visual Studio作为主要的开发工具。Visual Studio是一款功能强大的集成开发环境(IDE),提供了丰富的功能和工具。其中,代码编辑器提供了强大的编辑功能,支持多种编程语言,包括C++。调试器可以追踪代码执行过程,修复程序中的错误。编译器则能高效地将源代码转换为可执行文件或库文件[5]。对于涉及图形界面的开发,可视化的界面设计器能够快速构建用户界面。
4.2" 平台开发相关技术
4.2.1" C++语言
C++语言是一种功能丰富、灵活性高的通用编程语言,广泛应用于系统软件、应用软件、游戏开发等领域。其面向对象编程(OOP)特性使得程序结构清晰、模块化,而泛型编程(Generic Programming)则提高了代码的复用性和灵活性。标准模板库(STL)为程序员提供了丰富的数据结构和算法实现,极大简化了开发过程。此外,C++注重性能和效率,可直接访问硬件,具有低级别的控制能力,使得程序员能够编写高效率的代码。
4.2.2 康复控制算法
康复控制算法是用于康复工程的一种技术,通过运动和训练帮助康复患者恢复功能或减轻残疾。这些算法结合了生理特征和康复需求,设计个性化的康复方案,包括动作规划、运动控制等,利用先进的传感技术和运动追踪系统实现。这些算法能够有效地帮助患者提高生活质量,具有广泛的应用前景。
4.2.3 数据处理模块
数据处理模块是康复控制算法的核心组件,用于处理患者生理数据和运动状态。它实时采集数据,进行预处理和分析,以识别患者的运动模式和康复进展。最终,它制定个性化康复方案,包括调整参数和提供实时反馈,以促进康复进程。这一模块的作用至关重要,为实现个性化、高效率的康复治疗提供了技术支持,改善患者的生活质量[6]。
5" 系统设计与架构
5.1" 系统整体设计
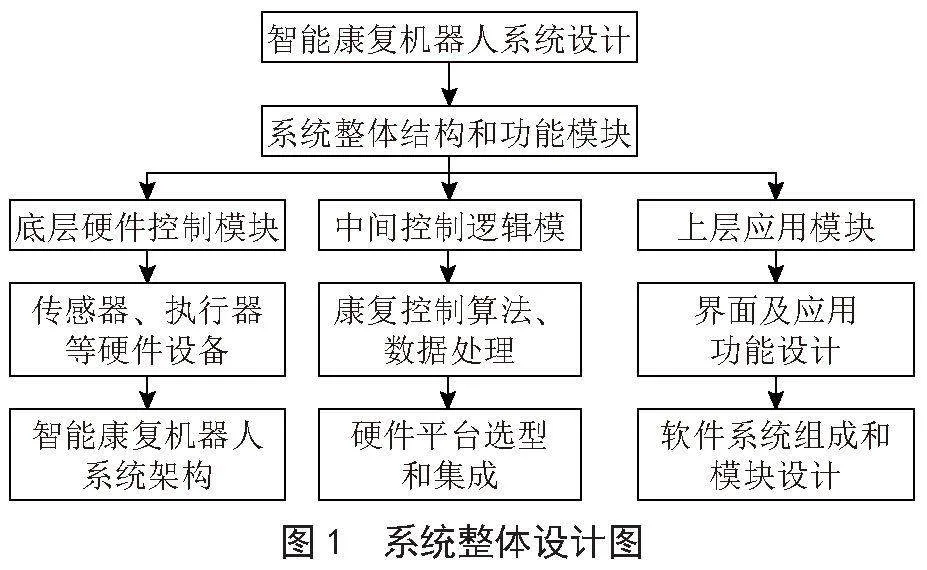
在系统整体结构方面,采用了模块化设计的理念,将系统划分为多个功能模块,每个模块负责特定的功能或任务。这样的设计使得系统的各个部分相对独立,易于理解、维护和扩展。将系统划分为底层硬件控制模块、中间控制逻辑模块和上层应用模块。系统整体设计图如图1所示。
5.2" 技术路线
5.2.1" 系统架构设计
基于C++语言,采用面向对象的设计方法,构建系统的整体架构。划分系统模块,包括感知与识别模块、控制与执行模块和交互与反馈模块等。
5.2.2" 传感器数据采集与处理
选择适合康复治疗场景的传感器,如惯性测量单元(IMU)、力传感器、视觉传感器等。开发数据采集模块,实时采集患者的运动数据和生理参数。设计数据处理算法,对采集到的数据进行实时处理和分析,提取有用的信息[7]。
5.2.3" 智能控制算法
设计智能控制算法,根据患者的运动状态和康复计划,生成相应的康复动作和控制指令。考虑使用机器学习或深度学习技术,实现智能算法的学习和优化。
5.2.4" 用户界面设计
直观的用户界面,提供患者信息录入、康复计划管理、实时监控等功能。考虑使用图形用户界面(GUI)工具库,如Qt等,加快界面开发速度。
5.2.5" 系统集成与测试
将各个模块进行集成,确保系统各部分能够协调工作。进行系统级别的功能测试、性能测试和稳定性测试,保证系统的可靠性和稳定性。
6" 系统实现
6.1" 感知与识别模块
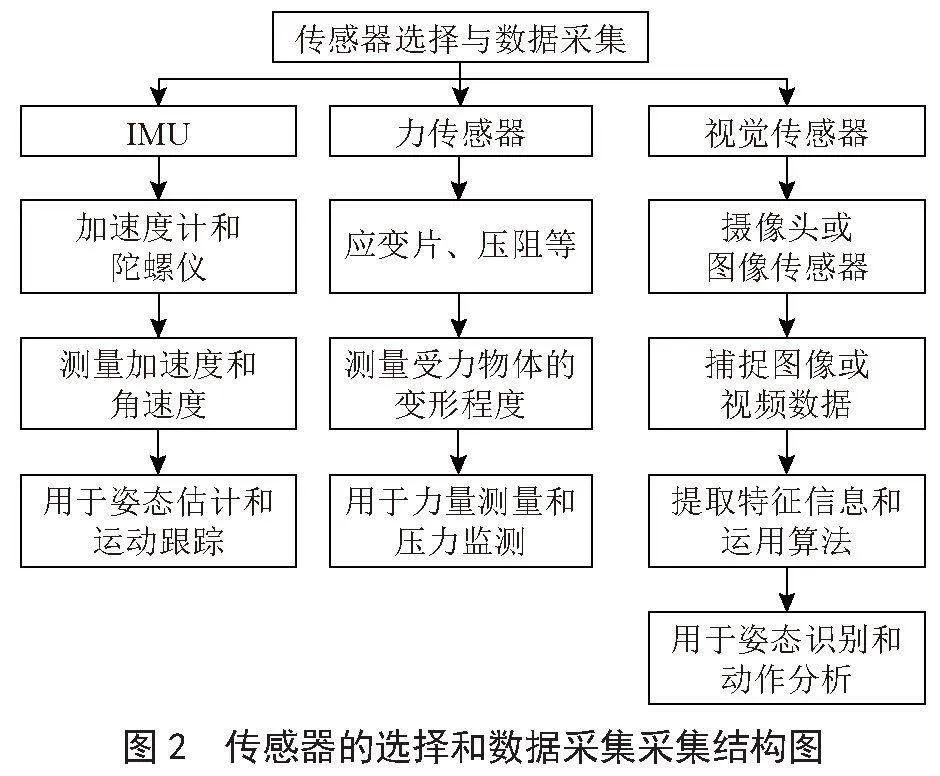
在传感器的选择上,考虑到康复机器人需要准确地感知用户的动作和姿态,因此选择了高精度的传感器设备,如惯性测量单元(IMU)、力传感器、视觉传感器等。这些传感器能够提供多维度的数据,包括加速度、角速度、力和视觉信息等[8]。其中传感器的选择和数据采集结构图如图2所示。
数据采集过程中,通过传感器实时采集用户的运动数据,并进行实时处理和分析,以获取用户的姿态、动作特征等信息,为后续的动作识别和控制提供支持。
6.2" 控制与执行模块
针对康复机器人的运动控制,设计了多种运动控制算法,包括路径规划、轨迹跟踪、力控制等。路径规划阶段,根据用户的康复需求和医疗建议,设计了个性化的康复路径,通过规划合适的运动轨迹,实现对用户关节的有针对性训练。此算法设计的部分代码如下:
6.3" 交互与反馈模块
设计了直观简洁的人机交互界面,包括触摸屏、语音交互等多种交互方式,使用户能够轻松地进行操作和监控。界面设计上,注重用户体验和易用性,提供了清晰明了的操作指引和训练计划,帮助用户更好地进行康复训练[9]。此模块的部分代码如下:
在康复训练过程中,可以实时监测用户的运动状态,并及时给予反馈和指导,帮助用户正确执行康复动作,提高训练效果。反馈方式包括视觉、声音等多种形式,根据用户的健康状况和康复进度,灵活调整反馈策略,使用户得到个性化的指导和支持。
6.4" 系统实现效果
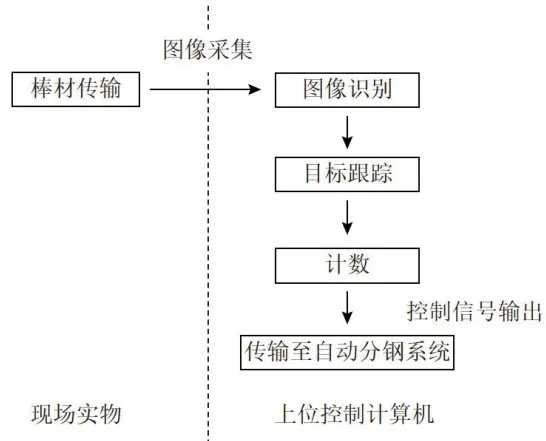
根据系统的界面设计要求,运用相关程序代码设计,基于C++的智能康复看护机器人系统的界面简介易用,其中系统健康档案管理页面效果图如图3所示。
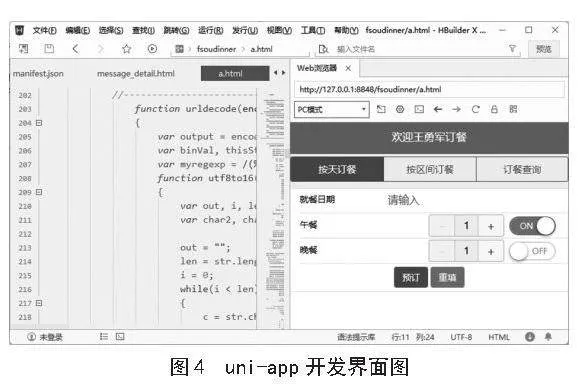
其中体检记录管理页面效果图如图4所示。
6.5" 系统性能测试
系统性能评估是对智能康复机器人系统各项功能和性能进行验证和分析的过程,旨在评估系统在实际应用中的表现和效果,为系统优化和改进提供依据。
6.5.1" 测试指标
系统响应时间:评估系统对用户指令的响应速度,包括从用户动作识别到机器人执行动作的时间。准确性:评估系统对用户动作和姿态的识别准确度,包括动作识别的正确率和姿态识别的误差范围[10]。稳定性:评估系统在长时间运行过程中的稳定性和可靠性,包括机器人运动的稳定性和系统故障率等。
6.5.2" 试结果与分析
为了更加全面地评估系统性能,进行了多次测试比对,并进行对比分析。测试结果表如表1所示。
结果分析:系统响应时间对比分析:在5次实验中,系统的平均响应时间在0.4到0.6秒之间波动,整体稳定性良好。实验3的0.4秒为最佳表现,而实验2的0.6秒为最长响应时间。系统在不同实验中表现出了一定的稳定性和一致性。
动作识别准确率对比分析:实验结果显示,在不同实验中动作识别准确率在92%到97%之间波动。实验3表现最佳,达到97%,而实验2表现最差,为92%。系统整体上保持了较高的动作识别准确率。
姿态识别误差范围对比分析:姿态识别误差范围在不同实验中保持在4~6度之间。实验结果显示了系统对用户姿态的准确识别能力,并且在不同实验中表现出一定的稳定性。
连续运行时间对比分析:5次实验中系统的连续运行时间在98~102小时之间。系统在长时间运行过程中表现出良好的稳定性和可靠性,能够满足持续康复训练的需求。
通过对多次实验结果的对比分析,可以更全面地了解系统在不同条件下的性能表现,并为系统的优化和改进提供更有针对性的建议和方向。
7" 结" 论
本论文通过对系统功能和性能进行
多次实验验证和定量分析,全面评估了系统在不同条件下的表现。通过对比分析实验结果,得出以下结论:
系统在不同条件下的响应时间波动较小,整体稳定性良好,能够满足实际应用需求。动作识别准确率在不同实验中保持在较高水平,表明系统具有良好的动作识别能力。姿态识别误差范围稳定在可接受的范围内,系统对用户姿态的识别准确性较高。系统具有良好的稳定性和可靠性,能够持续运行长时间,满足康复训练需求。
在未来的研究中,将进一步优化系统算法和性能,提高系统的实时性和准确性。同时,也将探索更多的应用场景,如康复训练、体育训练等,并将系统扩展到更多的设备和平台上,以满足不同用户群体的需求。通过持续的研究和改进,相信该系统将在人机交互、健康管理等领域发挥更重要的作用,为人们的生活和健康带来更多的便利和福祉。
参考文献:
[1] 姜玉哲,孙桂刚,李超.一种基于c++的人工智能加速卡推理服务设计方法及系统:CN202210012339.8 [P].2022-05-06.
[2] 焦洁.基于参数化与3D打印的智能陪护机器人设计 [J].数字制造科学,2022,20(3):205-209.
[3] 杜宇,姜伟.智能机器人仓储物流系统设计 [J].组合机床与自动化加工技术,2020(5):164-168.
[4] 薛靖宜,叶青.基于人体动作识别的智能机器人系统设计 [J].中国科技信息,2018(23):88-92.
[5] 裴庆庆.基于多传感融合技术的自主巡逻智能预警机器人系统的研究与设计 [J].兰州文理学院学报:自然科学版,2022,36(1):43-47.
[6] 李伟,李众利,张大鹏,等.基于电刺激上下肢协同智能康复机器人系统及其工作方法:CN202010736052.0 [P].2022-04-15.
[7] 彭云山.结构化道路无人清扫车规划算法研 [D].吉林:吉林大学.
[8] 刘泽,徐潇洁,邵波.基于多策略混合问答系统模型的图书馆咨询机器人的设计与应用 [J].新世纪图书馆,2022(5):43-49.
[9] SMITH J,JOHNSON E. Sensor-Based Human Activity Recognition for Elderly Health Monitoring: A Review [J].IEEE Transactions on Human-Machine Systems, 2020,50(4):123-134.
[10] BROWN D,CLARK S. Real-Time Motion Detection Using Wearable Sensors for Sports Training Applications [J].Journal of Sports Sciences, 2019,37(9), 1205-1212.