


摘" 要:为了提升非电专业电子技术应用实践,确保在智能化背景下机械专业学生能够完整掌握电子技术课程内容,加强学生动手实践能力,设计了能够实现循迹路线和避障的智能小车,满足不同学习阶段同学们的实验设计需求。该小车主控制单元为STM32,避障模块为HC-SR04超声波传感器、道路循迹为TCRT5000红外传感器、RC522射频识别辅助停车功能,OLED屏显示障碍距离和小车状况,有源蜂鸣器进行提醒,通过电路设计来实现各项功能,学生可自主规划和摆放障碍,并进行试验,有助于激发学生融入智能制造行业的兴趣。
关键词:机械工程;电子技术;教学实验;智能小车
中图分类号:TP39;G434 文献标识码:A 文章编号:2096-4706(2025)04-0179-06
Exploration of Progressive Experimental Teaching for Mechanical Majors in the Context of Intelligence
—Taking the Design and Implementation of Intelligent Trolley as an Example
LUO Shuli, GUO Zhanhong, WANG Hongbiao, FU Jingru
(College of Mechanical and Electronic Engineering, Tarim University, Aral" 843300, China)
Abstract: In order to enhance the electronics application practice of non-electronics majors, ensure that mechanical major students can completely master the electronics course content in the context of intelligence, and strengthen the handson practical ability of students, this paper designs an intelligent trolley which realizes the route tracking and obstacle avoidance, to meet the experimental design needs of students at different learning stages. The main control unit of the trolley is STM32, the obstacle avoidance module is HC-SR04 ultrasonic sensor, the road tracking module is TCRT5000 infrared sensor, and the assisted parking function relies on RC522 RFID. The OLED screen displays the obstacle distance and the trolley status, the active buzzer is used as a reminder, and the various functions are realized through the design of circuits. Students can plan and place the obstacles independently and carry out the experiments, which is conductive to stimulate students interest in integrating into the intelligent manufacturing industry.
Keywords: mechanical engineering; electronics; teaching experiment; intelligent trolley
0" 引" 言
当今大部分的传统理工类的机械类学科,在培养学生时依旧以机械结构的学习和优化为主,但随着科技的发展,智能化的领域越来越广泛,尤其是在汽车电子技术领域,传统电路分析的局限性开始逐渐显露,而智能化的发展是引起汽车及其相关产业链发生颠覆性变革的重要因素[1-2],所以汽车专业的学习转型是必要的。
针对这一背景,本教学实验设计紧跟汽车电子技术行业发展趋势,弥补了传统电子技术实验教学中偏重经典简单电路设计的问题。通过上位机系统和软硬件的研究,结合本科电子竞赛智能车设计赛道,设计操作可行、与实际生活紧密结合、难度适中的实验,从而满足不同学习阶段同学们的实验设计需求,加深学生对所学内容的理解和掌握,有效激发学生的学习兴趣和参与热情[3]。
1" 实验整体设计思路
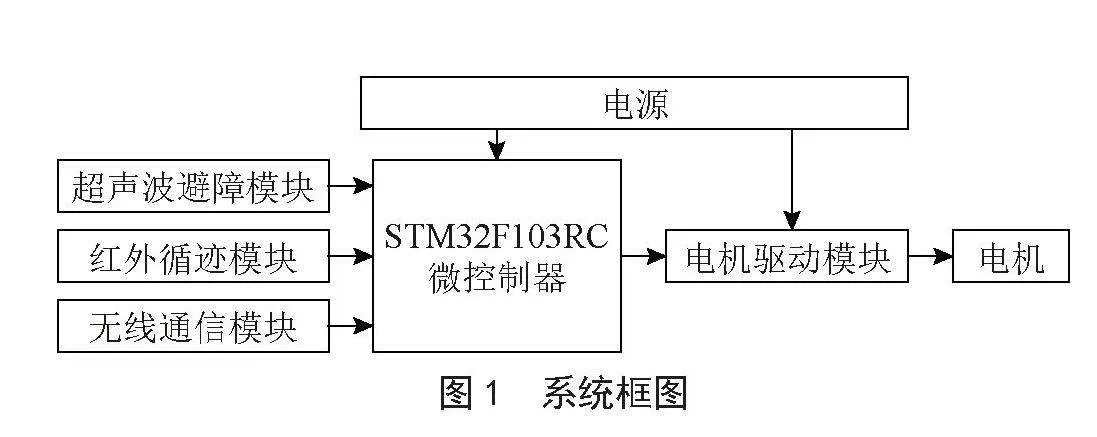
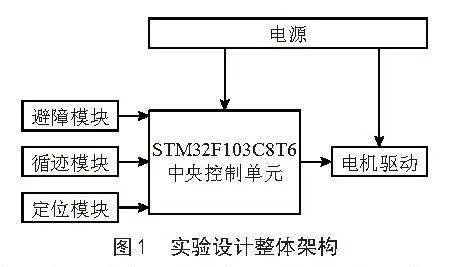
实验通过对不同传感器进行模块化的处理,只需将自己想用的功能外的程序进行注释,就可以单独实现功能,增强了程序的简便性和可操控性,整体设计架构如图1所示。该系统简单、直观且具有一定的趣味性,弥补了汽车专业在控制实践方面的不足,丰富了仿真实验的教学案例库,使得实验系统更加完善,可以有效地提高学生参与实验的积极性。
为了加强学生对单片机和传感器知识的了解,该智能小车采用STM32F103C8T6为中央控制单元,L298N驱动模块和直流电机为小车的执行机构,HC-SR04为避障模块,两个TCRT5000红外传感器实现道路循迹功能,RC522射频识别技术为辅助小车定位,OLED屏显示超声波读取的距离和RC522读取卡片,有源蜂鸣器进行避障和读卡提醒,电源由12 V外接电源,智能车功能包括自主避障、红外循迹、RFID定位。该智能小车结构简单,组装灵活,各模块开发成熟,价格便宜,能够实现所设定的功能。
2" 硬件设计
教学实践中,为学生准备STM32、HC-SR04、TCRT5000等传感器模块,小车底盘、热熔枪、锡焊等工具,学生分组合作来完成整个小车的组装、代码的编写等内容,并且自由发挥来规划小车循迹路线和障碍摆设,这样不仅可以培养学生的动手能力和合作能力,还可以不断激发学生的学习热情。
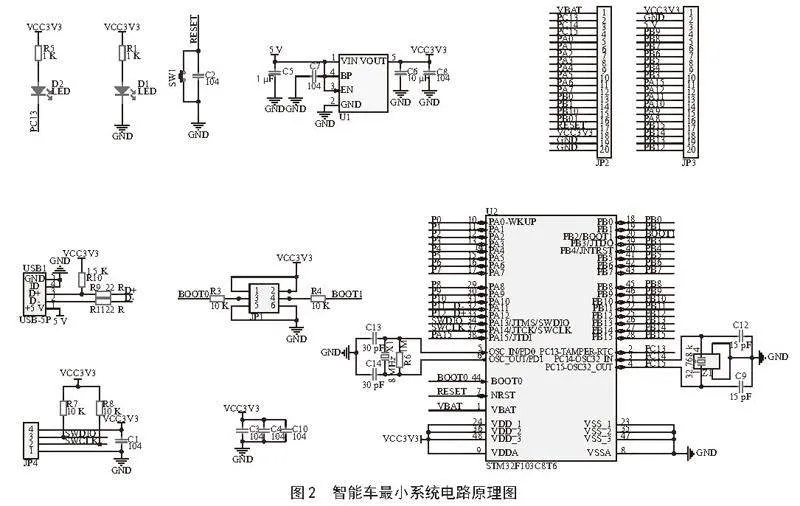
硬件驱动方面选用了L298N驱动电机模块和直流电机,小车的行走、转向就是通过STM32中央控制系统对电机驱动模块的控制,通过对模块引脚的高低电压改变,来显示电机的转速和转向,两个L298N模块对四个电机进行控制,并通过PWM进行调速,实现小车的前进、后退、转向;避障方面选用了HC-SR04超声波和舵机的配合,反应灵敏,测量范围广,价格便宜;循迹方面选用了TCRT5000红外传感器,操作简单,灵敏;定点停车选用了RC522,通过利用RFID射频识别技术,应用新颖,并且是无线识别技术以及一对一识别卡片,实验更加灵活,减少出错。外接12 V电源,通过L298N中的降压模块以及外接稳压模块来实现对单片机的供电,通过不同的程序应用来实现各项功能。智能车最小系统电路原理图如图2所示。
3" 程序软件设计
3.1" 开发程序环境和开发流程
程序的编写开发采用Keil uVision5软件,拥有包括功能强大的仿真模拟器在内的一套完整的开发系统[4-5]。新建工程,选用“STM32F103C8”单片机,并建立“User”“Hardware”等文件夹来存放代码,这样操作逻辑合理,寻找方便。根据传感器进行代码编写,在各个文件夹下面添加.c文件和.h文件。
由于STM32内部拥有几百个寄存器,想要使用这些寄存器的功能,仅凭自己来进行编写无非是十分困难的。ST公司考虑到这一点,为STM32F103C8T6微处理器准备了STM32专属的固件库。所以通过上面的过程建立好文件后,就可以将常用的固件库里的.c文件复制到各个文件夹下面即可。STM32软件设计的基本步骤如下:
1)初始化硬件和外设。当选择好外设引脚与STM32F103C8T6的GPIO端口的接线后,就要程序编写的第一步,对硬件和外设进行初始化,这包括配置GPIO引脚、设置时钟、初始化串口通信、配置中断等过程。初始化后的硬件和外设才可以对其进行程序功能编写。
2)编写功能代码。在硬件和外设初始化完成后,就可以开始编写实现外设所需功能的代码。
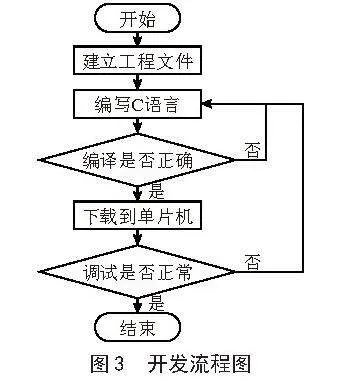
3)调试和优化代码。在代码编写完成后,需要进行调试和优化。使用开发环境提供的调试工具,对代码进行优化,确保程序的执行效率以及稳定性。
4)仿真和验证。对软件设计的程序进行最后的仿真和验证,通过Keil5的仿真功能,可以确保软件设计程序能够正常运行。开发流程图如图3所示。
3.2" 程序烧录环境
完成编程后,就可以将程序烧录到单片机中,进行测试,这里采DAP进行烧录,DAP软件提供了一种方便、高效的方式来将程序烧录到目标设备中,它可以与Keil5软件无缝集成,简化了程序下载的过程。通过DAP软件,我们可以将程序直接烧录到处理器的内存中,使其能够在实际硬件环境中运行。图4为DAP实物图。
3.3" 驱动模块的软件设计与实现
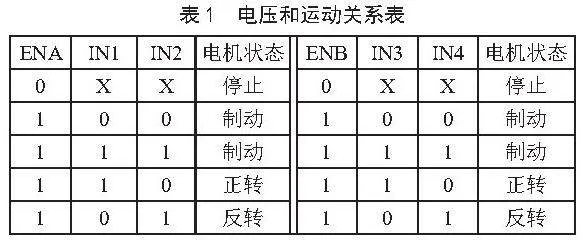
驱动模块利用STM32的定时器生成PWM,对L298N输出的电压进行脉冲调节来实现对速度的控制,通过改变PWM波的占空比调节直流电机速度,相比较于交流电机,通过调节PWM占空比可以实现直流电机速度可控精度高,速度调节范围广等优点[6]。通过这项技术,可以对小车实现较大范围的调速,以及实现小车的转向功能,表1为电压和运动关系表。
3.4" 避障模块的软件设计与实现
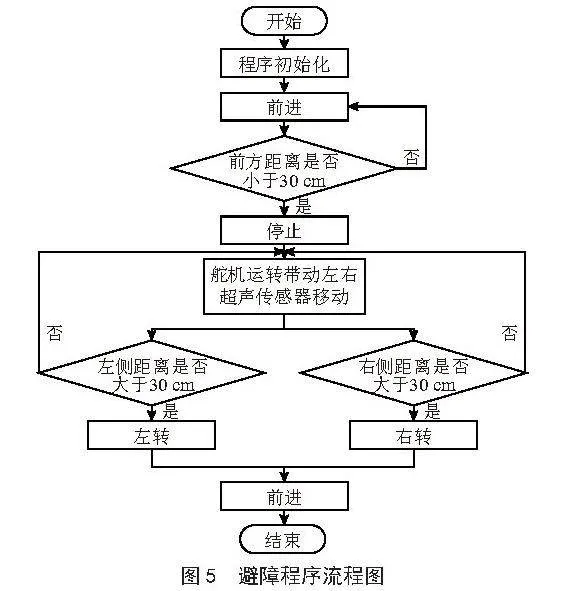
HC-SR04超声波测距模块是一种先进的无接触式测距器件,提供了2~400 cm的非接触式距离[7],可以适应各种环境,应用十分广泛,特别是在机器人避障、物体测距、液位检测、公共安防以及停车场检测等领域。在编写程序代码以驱动HC-SR04超声波测距模块时,确实需要考虑到发射信号与回向信号之间的时序关系,以确保测量结果的准确性。为了防止发射信号对回向信号的影响,测量周期应当设定得足够长,以允许超声波信号完全传播、反射并返回到接收器。
避障模块流程如图5所示,小车首先正常前进,超声波模块不断发出超声波来检测前方的距离,当检测到前方距离小于30 cm时,由中央控制单元处理信息,并发出指令让小车停止,然后由舵机模块首先带动超声波模块向左侧转动,进行左测距,并将距离存入数组中,然后舵机带动超声波模块向右侧转动,进行右测距,同时将距离存入数值,然后中央控制单元比较两个数值的大小,然后下达向距离远的那侧进行转弯,并不断循环程序。
3.5" 循迹模块的软件设计与实现
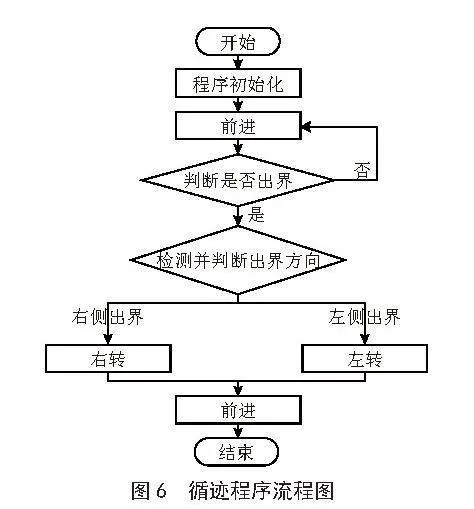
为了完成小车沿黑带运动的任务,需要设计一个精准的循迹模块,使其能够感知并定位黑带的轨迹。这一过程中,小车通过传感器捕捉黑带的位置信息,随后将这些数据传输给中央处理模块。中央处理模块对这些数据进行快速分析,并据此发出指令,驱动电机模块作出相应的转向或速度调整,使小车能够紧密跟随黑带的走向。循迹检测采用高发射功率红外光电二极管和高灵敏光电晶体[8]。红外发射器接收红外信号,从而完成高低电平的输出[9]。循迹逻辑是指红外循迹传感器在小车的两侧,起始状态显示为红外传感器接收到红外线,输出低电平,指示灯亮,小车前进;当小车左侧的红外传感器检测到黑线时,中央控制系统进行读取数据并下达左转的指令,另一侧检测则相反。图6为循迹程序流程图。
3.6" RFID模块的软件设计与实现
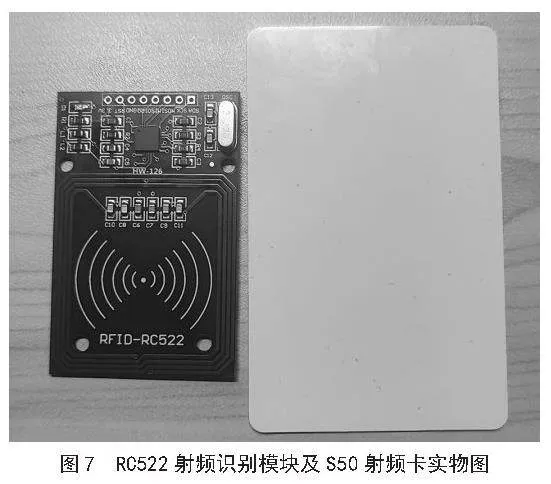
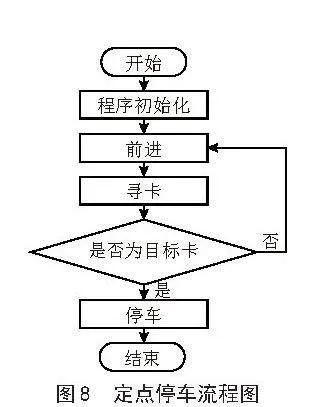
RFID模块,即无线射频识别模块,是一种集成了RFID技术的硬件设备,主要用于读取和处理RFID标签的信息。它由RFID芯片和相应的电路组件组成,并能与其他硬件设备或系统进行通信,以实现RFID技术的应用。本实验设计考虑所用的功能、方便性以及经济性,所采用的RFID射频识别模块为RC522模块以及S50射频卡,用来辅助自动行走小车实现定点停车的功能。MFRC522是一种应用于13.56 MHz非接触式通信中高集成度读写卡芯片[10]。在实际应用中,先将所设定的数据密码通过RC522对空白S50射频卡进行写入,使RC522与S50形成一一对应的关系,当RC522识别到S50射频卡时,S50会对RC522输入数据信号,再由STM32中央控制系统对数据进行处理,进行下一步操作。
首先通过RC522射频识别模块对S50射频卡进行写入,使得STM32的Flash提前储备了S50的数据,后续直接进行读取就可以实现所需要的功能。图7为RC522模块以及S50射频卡实物图,图8为定点停车流程图。
4" 系统调试
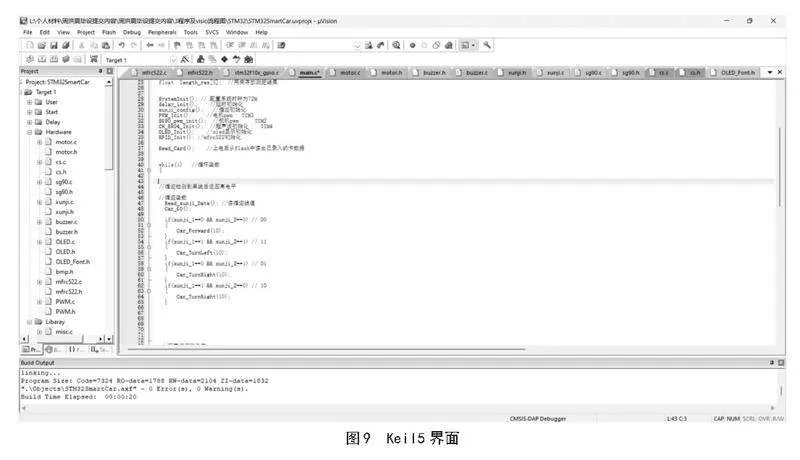
系统调试是一个重要的步骤,确保电子设备的正确运行。检查所有元器件是否完好无损,没有损坏或缺陷,确保它们可以正常工作。检查元器件之间的物理连接是否牢固,没有松动或接触不良的情况等。将之前所述的各模块电路设计,进行详细的软件编程工作。为了确保程序的正确性和稳定性,采用Keil5软件作为主要的编程和仿真工具。图9为Keil5界面。
4.1" 系统程序调试
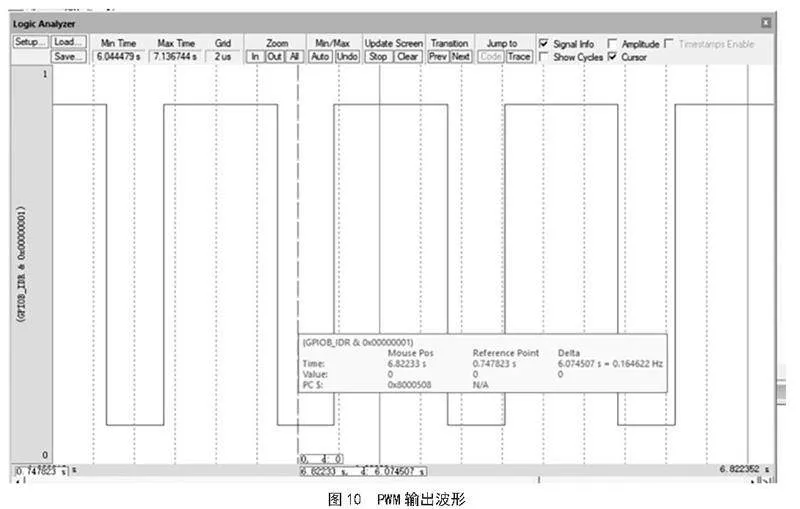
通过使用Keil5的仿真功能,可以观察程序的运行是否正常,来判断程序编写的正确性,图10为PWM输出波形。
4.2" 硬件测试
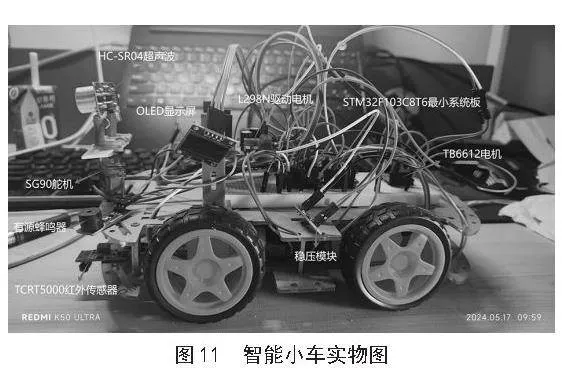
将元器件按照电气原理图进行组装,实物如图11所示,组装完成后就可以运行小车来测试功能是否正常工作,并根据所反馈的现象来对程序进行更改和优化。图12和图13为小车功能调试图。
经过调试测试,排除干扰因素,小车在运行中能够实现代码所设定的功能。
5" 结" 论
围绕电子技术课程实践当中同学们不同学习程度对电路设计、程序编写等的要求,结合新形势下机械专业智能化发展的社会需求,对汽车专业电子技术教学实验进行了专业化递阶设计。该实验案例使得同学们达到理实一体化教学的目标,枯燥的电路分析得到了有效利用,智能车组装操作,锻炼了同学们电路焊接的技能,程序编写加强了学生对智能化车辆功能的应用,从而为我国智能汽车事业发展的不同需求提供高质量人才。
参考文献:
[1] 吴桐,覃玄.智能车辆工程专业人才培养策略探讨——以湖北汽车工业学院为例 [J].汽车实用技术,2024,49(11):146-148+174.
[2] 郭轶锋,高珂.新质生产力条件下技术技能人才能力培养的挑战与对策分析 [J].中国职业技术教育,2024(10):34-40.
[3] 韩团军,李蛟龙,黄朝军,等.肌电信号控制的智能小车实验平台设计 [J].实验室研究与探索,2024,43(2):45-49.
[4] 沙晶晶,夏玉果.电子测量技术实验教学案例设计 [J].现代信息科技,2024,8(9):184-189.
[5] 张灵玉,邓博,袁林,等.基于单片机的智能平衡小车设计 [J].成都信息工程大学学报,2022,37(2):138-143.
[6] 赵远东,方源,梁路阳.C语言环境下基于单片机的直流电机调速系统的设计与实现 [J].计算机与现代化,2012(4):45-47.
[7] 李军,申俊泽.超声测距模块HC-SR04的超声波测距仪设计[J].单片机与嵌入式系统应用,2011,11(10):77-78.
[8] 朱春华,顾雪亮.基于红外反射式传感器TCRT5000的循迹小车设计 [J].现代电子技术,2018,41(18):143-146.
[9] 欧建荣.Python程序设计教学实践——以“交通灯之While循环结构”为例 [J].现代信息科技,2023,7(22):191-194.
[10] 阎世梁,王银玲,王敏,等.基于毫米波雷达的生命体征信号检测实验教学设计 [J].实验室研究与探索,2024,43(5):122-128+174.
作者简介:罗树丽(1980—),女,汉族,新疆昌吉人,高级实验师,硕士,研究方向:机械工程;通信作者:郭展宏(1993—),男,汉族,河南周口人,讲师,硕士,研究方向:机械工程。
收稿日期:2024-07-21
基金项目:塔里木大学一流本科课程建设项目(TDYLKC202311);塔里木大学高等教育教学改革研究项目(TDGJYB2406);塔里木大学一流本科课程建设项目(TDYLKC202102)