

摘" 要:隧道病害检测工作中以人工形式获取信息操作难度大,不仅影响测绘准确度,而且工作效率低下,针对这些问题,文章提出合理应用激光雷达扫描技术,通过多种方式获取隧道数据信息,并结合BIM技术将信息数据整合后统一到三维模型中来进行隧道的病害检测工作的方法。两种方法的结合提高了隧道病害检测的速度和数字影像数据的准确度,同时隧道病害检测时效性不足的问题也可得到解决,工作的效率得到了很大的提升。通过结合激光雷达技术的精确数据采集和BIM技术对现实环境可视化展现的优势,实现了对隧道病害的准确高效检测,可以更加直观地了解到隧道的病害状况。
关键词:激光雷达;BIM;隧道病害检测;三维模型
中图分类号:TP39;P258" " 文献标识码:A" 文章编号:2096-4706(2024)21-0148-06
Application of LiDAR and BIM Technology in Tunnel Disease Detection
DONG Jianlong1, NI Han2
(1.School of Spatial Information and Geomatics Engineering, Anhui University of Science and Technology, Huainan" 232001, China; 2.Beijing iSpatial Technology Co., Ltd., Beijing" 100085, China)
Abstract: The operation of manual information acquisition form is difficult in tunnel disease detection work, which not only affects the accuracy of mapping, but also has low working efficiency. In view of these issues, this paper puts forward a method that applies LiDAR scanning technology reasonably, obtains tunnel data information through a variety of ways, and combines with BIM technology to integrate and unify the information data into the three-dimensional model to carry out the tunnel disease detection work. The combination of the two methods improves the speed of tunnel disease detection and the accuracy of digital image data. At the same time, the problem of lack of timeliness of tunnel disease detection can be solved, and the working efficiency has been greatly improved. By combining the accurate data acquisition of LiDAR technology and the visualization advantages of BIM technology for the real environment, the accurate and efficient detection of tunnel disease is realized, and the disease condition of the tunnel could be more intuitively understood.
Keywords: LiDAR; BIM; tunnel disease detection; three-dimensional model
0" 引" 言
传统的隧道病害检测工作通常为人工检测,不仅获取的数据精度达不到隧道病害检测工作所需的要求,而且所需的工作周期太长会造成所得的结果时效性不足,故引入激光雷达与BIM两种新型技术来进行隧道病害检测工作。激光雷达扫描技术具有全天候、高精度、高分辨率、自动化和实时化等优点,已经在自动驾驶、环境监测、地图制作等领域得到了广泛的应用。BIM技术具有可视化、同步性高等优点,已经在建筑设计、设施管理、土地开发等领域得到广泛应用。这两种技术的优点很好的应对了当前隧道检测工作由于隧道特殊的环境所导致的技术限制。
当前,众多学者针对隧道检测工作获取数据的精度不够以及所得结果时效性不足的问题提出了图像分类、目标检测及语义分割等方法来应对。通过先进的技术或者方法更加高效准确的进行隧道病害检测工作是当前研究的热点。吴刚等[1]提出了一种基于深度学习模块化设计的隧道多类表观病害检测模型来实现对隧道的一些病害现象进行快速准确的识别;车博文等[2]提出了基于无人机图像与深度学习的隧道洞门墙病害检测方法应对传统人工病害检测方法效率低下、危险性高等问题;蒋永强等[3]提出了设计一套隧道检测车表观检测系统,该系统能够生成很好表现隧道内部病害情况的高分辨率隧道内壁全景图来进行隧道检测工作。虽然当前针对隧道病害检测已有很多研究,但这些工作仍有一些不足,如受环境因素影响大,隧道内部信号差且光线昏暗,无法在实现高效率的同时保证图像精度;所设计的模型无法应对复杂的隧道内部结构。
因此在由北京数联科技股份有限公司提供的隧道病害检测所需的相关技术支持下,提出将激光雷达技术与BIM技术协同设计的方法来解决隧道病害检测时提取数据工作量大、效率低、数据少等缺点,以激光雷达技术来获取隧道数据,以BIM技术对项目工程统筹管理,最后搭建一个激光雷达与BIM技术协同使用的平台,通过一个共同的基准来对隧道进行隧道病害检测工作。
1" 激光雷达扫描与BIM技术协同设计的实现
1.1" 工作原理
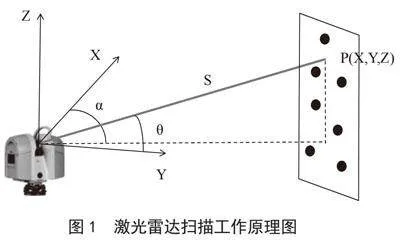
激光扫描技术工作原理是三维激光扫描系统坐标原点位于扫描仪相位中心,首先发射器发出一个激光脉冲信号,内部控制系统旋转反射镜,激光脉冲经物体表面漫反射后,沿着几乎相同的路径反向传回到接收器,内部计算系统通过脉冲发出和接收时间,得到目标点到相位中心距离S,再结合脉冲发出时扫描仪水平和竖直方向旋转角α、β,最后通过坐标正算和校正,获得P点坐标[4]。图1为激光雷达扫描技术的工作原理图。
BIM技术工作原理是将项目在设计、施工、运营的全生命周期中所涉及的项目信息综合到统一的三维信息模型中,包含项目的几何、物理、功能和性能等信息;项目不同的参与方在项目的各个阶段可以基于统一的信息模型,利用和维护这些信息进行协同工作,并对项目进行各种类型和专业的决策与应用。在设计、施工、运营的全生命周期,实现了信息的共享和集成,以及工程信息的三维可视化查询与应用,提高了工程建设的质量和效率,大幅节约了项目成本,提升了科学决策和管理水平[5]。
1.2" 技术协同设计实现
在实际工程项目中,激光雷达测绘技术借助其强大的电磁波信号测绘能力以及出色的穿透力和高精度的测量结果,为工程测绘提供了可靠的数据支持。即便是在复杂多变的环境条件下,激光雷达技术也能确保数据的时效性和准确性,为工程项目的顺利实施提供了坚实的基础。BIM技术在项目工程中最大的优势是设计可视化、施工可视化,利用BIM的可视化特性,可以缩短检测时间,显著降低成本,提高工程项目进行的效率。激光雷达测绘技术和BIM技术的综合应用,不仅显著提高了隧道病害检测的效率和准确性,而且为隧道工程的整体管理和运营提供了有力的技术保障。长远来看这种高精度、高效率的技术方案将在隧道工程领域发挥越来越重要的作用,为保障隧道安全、提升运营效率提供坚实的技术支撑[6]。
因此,激光雷达技术与BIM技术协同设计应用到隧道病害检测中的技术路线为先利用激光雷达技术采集数据的时效性获取隧道病害检测所需要的数据,进行相关的病害分析后;再基于其可视化的特性,建立隧道三维模型,将激光雷达获取的数据以及病害分析的结果赋予到创建的虚拟隧道模型中;最后搭建平台将各种信息整合到统一的工作平台中,实现对隧道病害检测工作的全局管理运营。
2" 激光雷达扫描技术在隧道检测中的应用
2.1" 隧道影像数据获取
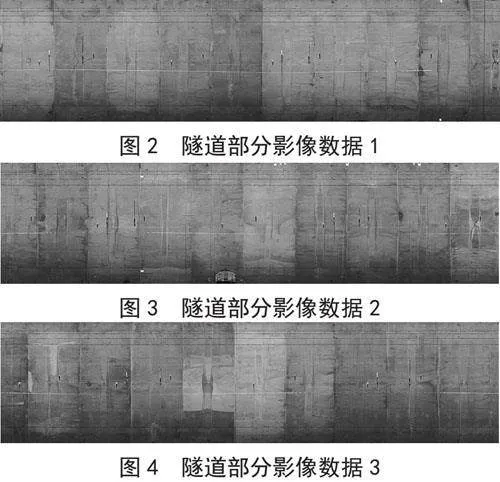
获取隧道影像数据需先将激光雷达扫描设备置于隧道的轨道上,设备的激光发射器会发射一个高能激光束,激光束照射到目标物体上,并与目标物体的表面相互作用,设备上的接收器接收从目标物体反射回来的激光束信号,不断的发射与接收信号,获取多个点的距离和形状信息,激光雷达设备也可以记录激光束与目标物体之间的强度信息,基于这些信息最后的得到隧道的影像数据图。图2、图3、图4所示为隧道的部分影像图。得到影像数据图后便可进行隧道的病害检测。
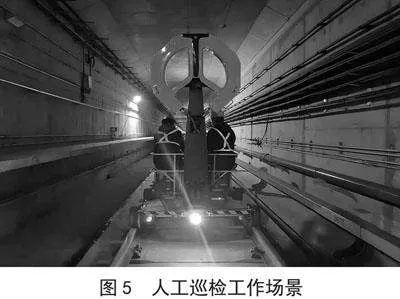
与人工的目视巡查相比,将隧道的情况由隧道的影像图展现,更加的直观清晰,不会存在漏检,错检的现象。由于很多隧道的病害情况是较为微观的,但其存在仍会对隧道的健康情况有很大的影响,人工的目视巡检极难发现这些较为微观的病害现象,由此可以看出激光雷达技术进行隧道病害检测的先进性和优越性。图5为人工巡检隧道病害的工作场景,不仅效率低下,而且不能准确地找到所有的病害处。
2.2" 隧道病害检测
隧道竣工后安全隐患主要包括隧道结构的变形、渗水、脱落、裂缝等,隐患产生的原因主要是受地质及隧道周边施工的影响。为获取隧道表现形式更加多样的信息,同时提高工作效率,采用激光扫描进行作业,通过激光雷达扫描技术可以高效地采集隧道的影像数据,基于获取的影像数据可以直观的判断隧道存在的病害现象[7]。现基于激光雷达影像图对隧道进行渗水检测及开裂检测,以此展现激光雷达扫描技术能够高效准确的得到隧道的病害情况,精确的找到每一处病害的位置所在。
2.2.1" 隧道渗水检测
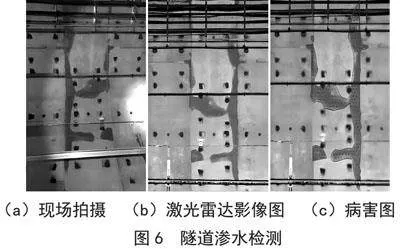
修建隧道的过程中会破坏原始的水系统平衡,隧道成为其附近水源集聚的通道。当隧道围岩与含水层连通,而隧道的防水及排水设施、方法不完善时,就必然要发生隧道水害。隧道渗水还会引起一系列的危害,渗水会导致隧道内部的地基松软和不稳定,进而可能引发地质灾害,如塌方和滑坡。其次,渗水会导致隧道内部受到腐蚀和侵蚀,加速隧道内部的老化和损坏。这可能会导致隧道的开裂、掉块和破损,进一步降低隧道结构的承载能力和安全可靠性。此外,渗水还可能引发隧道内部的冰冻和结冰现象,破坏隧道结构和排水系统。因此,及时发现和修复隧道渗水问题是非常重要的,以确保隧道的正常运营和行车安全。通过激光雷达扫描获得的影像图可以高效准确找到隧道内部渗水的地方,如图6所示激光扫描技术对隧道渗水的检测。
通过激光雷达影像图与现场拍摄的图片对比可以看出,激光雷达扫描获取的影像图可以清晰的反映出隧道渗水的位置以及渗水的面积,将渗水的区域通过圆滑的曲线连接,便能计算得到较为准确的渗水面积。
2.2.2" 隧道开裂检测
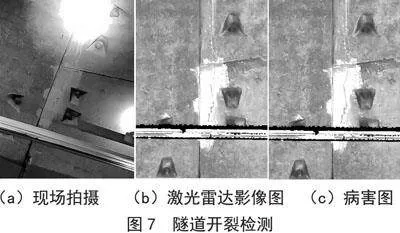
隧道完工后随着使用时间的增长会在自然环境以及一些人为因素影响下导致隧道开裂,隧道开裂会使结构完成预定功能的能力降低,直接影响隧道的使用性能,缩短隧道的维护周期和使用寿命,存在着巨大的安全隐患。因此及时的发现隧道开裂的地方并对开裂的地方进行维护和定期的检查是非常有必要的。通过激光雷达扫描隧道后获取的影像图可以快速的确定隧道开裂的位置,如图7隧道的开裂检测。
通过激光雷达影像图与现场拍摄的图片对比可以看出,激光雷达扫描获取的影像图准确的得到隧道开裂的位置以及开裂缝的数量,激光扫描进行病害检测工作不会存在漏检情况的发生。
2.3" 隧道病害情况汇总
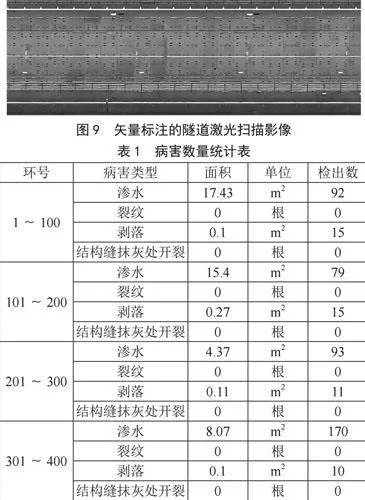
将需要病害检测的隧道分成若干部分,得到每个部分的激光扫描的影像图片,如图8所示。再对影像图上的病害进行矢量标注,如图9所示。进行矢量标注后将结果导入病害分析软件,生成每个部分的渗水、裂纹、剥落、结构缝抹灰出开裂的数量统计表,如表1所示。
由表1汇总的数据可以看出,隧道渗水处检出数数量最多在301~400环,共检测出170处渗水,隧道检测渗水面积最大在1~100环,面积达到17.43 ㎡,故可以清晰的看出隧道渗水现象主要集中在隧道的初始和末尾的位置,因此在后续的工作中需着重对隧道前100环和后100环处进行检测和治理;隧道并未检测处裂纹与结构缝抹灰出开裂的现象,且所检测出的剥落现象也较少,推断原因为检测区域的隧道建成时间不长所致,故暂时不需过度关注此类病害问题。分析可知通过激光雷达扫描技术进行隧道病害检测工作,可以高效直观准确的了解隧道的病害情况,这是人工巡检以及通过一些模型进行病害检测所呈现不出的效果。
3" BIM技术在隧道检测中的应用
BIM技术通过创建准确的数字模型,在隧道的施工过程中提供实时的数据和信息管理。通过传感器数据与BIM模型进行集成,实时监测隧道的结构健康状况、环境参数和设备状态。BIM技术在隧道检测中的使用应在先收集隧道相关的数据后,数据包括设计图纸、地形测量数据、地质勘探数据、施工记录等,这些数据是建立BIM模型的基础;首先应该建立好隧道的三维模型,接着在已建立好的基础隧道模型添加隧道的属性信息,包括隧道的材料属性、设备布置等;然后在此基础上添加运营和维护信息,包括设备维护记录、维修记录、安全检查等;最后进行模型的可视化输出,利用相关的BIM软件的渲染和可视化功能,将隧道模型呈现为逼真的图像,隧道的状态信息也在图像上得到可视化的展现。
3.1" 隧道点云数据处理
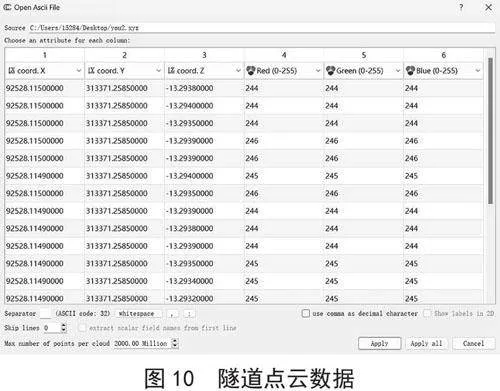
进行隧道的建模前,先要进行点云数据的处理。点云数据是指在一个三维坐标系统中的一组向量的集合,以点的形式记录,每一个点包含有三维坐标,并且可以携带有关该点属性的其他信息,例如颜色、反射率、强度等。隧道在建设过程中会形成庞大的点云数据信息,有效的处理点云数据可以大大的减少工作量以及降低工作难度。激光雷达扫描仪获取隧道表面的点云数据如图10所示。
在获取点云数据后则需要结合实际的测量需求对其进行去噪、过滤处理,噪声点可以划分为混合噪声点和分离噪声点。一般情况下,出现噪声的原因主要是分站扫描前障碍物以及阻挡物较多,导致识别错误[8]。进行隧道模型建立前需对点云数据进行抽稀、去噪处理。
3.2" 隧道三维模型建立
根据处理后的点云数据,使用三维重建算法将其转化为三维模型。对生成的三维模型进行优化和修复,以去除不规则的几何形状、填补缺失的部分或修复表面的不连续性,对生成的三维模型进行验证、检查,确保模型的准确性和完整性[9]。图11所示为通过点云数据建立的隧道三维模型。
不同的点云数据在处理后会得到不同状态的三维模型,通过之前激光雷达扫描所分析的隧道病害情况对三维模型进行信息的添加以及颜色的渲染,便能对隧道的状态进行很好的实时呈现,不需要再进行烦琐的重测、检查的过程。该三维模型是由隧道点云的高程属性所展示的,修改点云属性就可得到不同需求的三维模型。
4" 激光雷达与BIM在隧道检测的协同设计
激光雷达扫描技术与BIM技术在隧道病害检测过程中扮演着不同的角色,激光雷达扫描技术进行的是检测工作,找到隧道所有的病害处并统计出来,而BIM技术进行的则是将所有的信息收集起来,为检测后的工作打下基础[10]。现搭建一个平台,使这两种技术相辅相成,协同工作。
4.1" 激光雷达与BIM协同设计平台搭建思路
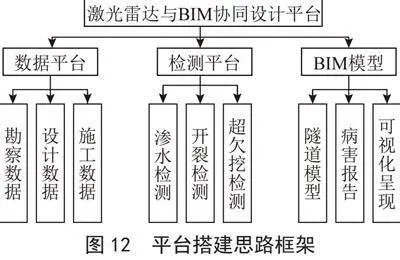
激光雷达与BIM的协同设计平台由三个部分组成,分别为数据平台,检测平台以及BIM模型。平台之间相互支撑,相互协同运作。
数据平台由勘察数据、设计数据、施工数据支撑,将工程项目的开始、施工、竣工和后期检查的所有数据集中到数据平台中。其中隧道勘察数据包括隧道点云,地质地形,激光扫描影像;隧道设计数据包括隧道几何形状,隧道纵横断面,隧道变形计算;隧道施工数据包括施工方案,使用的仪器设备,工作流程,质量检查。检测平台进行隧道的病害检测工作,从数据平台中调用数据进行隧道渗水、开裂、超欠挖的分析。BIM模型指的是通过数据平台中的点云数据对隧道进行建模的虚拟模型,将检测后的隧道病害情况呈现在该虚拟模型中,在模型上插入接口,显示隧道的状态以及隧道各个部分的病害报告。激光雷达与BIM协同设计平台搭建思路如图12所示。
4.2" 平台搭建流程
搭建应用于隧道病害检测的应用平台前应该先确定好具体的流程思路,大致为以下六步。第一步确定需求,确定平台是服务于隧道病害检测工作的目标和功能以及该网页平台是用于提供服务,以便后续设计和开发过程可以满足这些需求;第二步规划设计,在确定需求后,进行网页平台的规划和设计。确定网页的结构、布局和功能,以及选择适合的颜色、字体和图像等设计元素;第三步选择技术语言,确定HTML前端开发技术进行网页页面的设计,确定Python后端开发技术进行网页平台功能的设计;第四步开发前端,前端开发涉及创建网页的结构、样式和交互[11]。使用HTML定义网页的结构,使用CSS添加样式和布局,使用JavaScript实现想呈现的效果,第五步开发后端,使用相应的框架和库来处理请求、处理数据、实现所需的功能,并且和数据库进行交互,存储和检索数据;第六步测试和优化,发现平台潜在的问题进行修复,确保网页平台在不同环境和设备上都能正常运行。根据测试结果进行优化和改进,提升平台的性能[12]。
4.3" 激光雷达与BIM协同平台的应用
现搭建一个用于隧道病害检测的激光雷达与BIM协同设计的平台,平台的界面如图13所示。该平台将激光雷达扫描BIM技术协同设计,平台中包含激光雷达获取的影像数据、隧道的设计数据和施工数据、搭建的隧道模型以及进行病害检测的报告汇总。
所有的数据信息以及工作过程与结果全部都纳入统一的平台中,工作人员能够对工程进行统筹管理,进行隧道病害检测工作有了统一的基准。不仅提高了工作效率,还解决了项目进行时信息不互通的问题。
5" 结" 论
本文所提出的激光雷达扫描和BIM技术的协同设计应用于隧道病害检测工作的思路,提高了隧道检测时数据采集的准确性,对检测结果实时的更新和可视化,使整个项目工程的工程和质量都得到了很大的提升,解决了隧道病害检测时提取数据工作量大、效率低、数据少的问题。此外,后续的研究中还可在隧道的三维模型中加入地形、地貌数据信息,对原有的三维模型进行改进,因为地形、地貌的因素也极大影响隧道的健康状态,所以工作人员也可以通过改进后的三维模型深入分析隧道的病害是由于什么原因所导致。
参考文献:
[1] 吴刚,罗炜,王小龙,等.基于深度学习的盾构隧道衬砌表观病害检测模型研究 [J].现代隧道技术,2023,60(4):67-75.
[2] 车博文,包卫星,郭强,等.基于无人机图像与深度学习的高原地区隧道洞门墙病害检测方法 [J/OL].土木与环境工程学报:中英文,2024:1-11[2024-04-20].http://kns.cnki.net/kcms/detail/50.1218.TU.20240129.1454.004.html.
[3] 蒋永强,郭静,闫贺,等.隧道智能检测车表观检测系统设计与应用研究 [J].隧道建设:中英文,2023,43(S1):576-590.
[4] 张道春.基于三维激光扫描和BIM技术的建筑物立面图测量方法研究 [J].经纬天地,2023(1):75-78.
[5] 闵世平,林国庆.BIM及空间大数据技术支持下的铁路隧道施工数据管理 [J].测绘通报,2021(8):144-149+153.
[6] 赵玺旻.激光雷达测绘技术在工程测绘中的应用分析 [J].信息系统工程,2023(5):64-66.
[7] 宋云记,王智.利用三维激光扫描技术进行地铁隧道施工质量管控及病害检测 [J].测绘通报,2020(5):150-154.
[8] 赵栋.基于三维激光扫描的地铁隧道断面测量技术 [J].自动化应用,2023,64(12):167-170.
[9] HUANG Z,FU H L,FAN X D,et al. Rapid Surface Damage Detection Equipment for Subway Tunnels Based on Machine Vision System [J/OL].Journal of Infrastructure Systems,2021,27(1):04020047(2020-11-27).https://doi.org/10.1061/(ASCE)IS.1943-555X.0000591.
[10] DONG Y N,WANG J,WANG Z F,et al. A Deep-Learning-Based Multiple Defect Detection Method for Tunnel Lining Damages [J].IEEE Access,2019,7:182643-182657.
[11] LIU Y,LI H,WANG Y L,et al. Damage Detection of Tunnel Based on the High-density Cross-sectional Curvature Obtained Using Strain Data from BOTDA Sensors [J/OL].Mechanical Systems and Signal Processing,2021,158:107728(2021-03-12).https://doi.org/10.1016/j.ymssp.2021.107728.
[12] 石硕,史圆圆.三维GIS在铁路BIM协同设计中的应用 [J].测绘通报,2021(S1):294-298.
作者简介:董健龙(2000—),男,汉族,安徽合肥人,硕士研究生在读,研究方向:BIM技术及三维可视化;通信作者:倪涵(1964—),男,汉族,浙江舟山人,高级工程师,硕士,研究方向:GIS。